УДК 662.75
КОРРЕКЦИЯ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ СИСТЕМЫ УПРАВЛЕНИЯ
Бобриков С.А., Пичугин Е.Д.
Характеристики некоторых элементов системы управления, в том числе и объекта управления, как статические, так и динамические, могут обладать нежелательными для разработчика системы управления свойствами, например, нелинейность статической характеристики, большая постоянная времени, интегрирующие свойства и пр. Нелинейность статической характеристики объекта управления - явление нежелательное, но часто встречающееся в практике. Например, морское судно, как объект управления, имеет неоднозначную статическую характеристику, что приводит в некоторых случаях к появлению автоколебаний в системе управления судном с авторулевым [1]. Нелинейности типа "люфт" имеют место в случаях, когда в системе управления есть механические передачи.
Известны методы коррекции динамических свойств элементов, путем включения корректирующего звена параллельно элементу, или в виде местной обратной связи [2]. Там же описан метод вибрационной линеаризации нелинейной статической характеристики, основанный на создании автоколебаний в части системы, включающей нелинейное звено. При этом для медленно меняющихся во времени сигналов нелинейное звено проявляет себя как линейное.
Задача одновременного улучшения как статических свойств элемента, так и его динамических свойств является актуальной.
На рис.1 приведена структурная схема системы коррекции характеристик элемента, позволяющая в ряде случаев не только "исключить" нелинейность статической характеристики, но также изменить динамические характеристики элемента. На рис.1 приняты следующие обозначения: KО(P) -передаточная функция элемента системы управления, характеристики которого желательно изменить; KЖ(P) - передаточная функция желаемая; KК(P) - передаточная функция корректирующего звена.
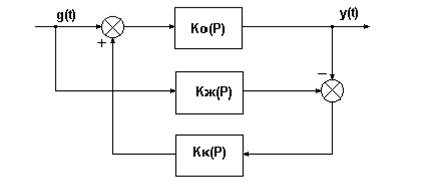
Рис.1 Структурная схема системы коррекции характеристик элемента
Передаточная функция системы коррекции, связывающая входное воздействие g(t) с выходным сигналом y(t), равна
 . (1)
. (1)
Из (1) видно, что если KК(P) устремить в бесконечность, то в пределе передаточная функция всей схемы будет равна желаемой передаточной функции KЖ(Р). Как показывают результаты моделирования, в случае, когда корректируемый элемент - звено первого порядка и не имеет запаздывания - хороший результат (приближение передаточной функции всей схемы к желаемой) получается при условии KК(P) = K - постоянный коэффициент.
На рис.2 приведены результаты моделирования: а) статическая характеристика объекта; б) статическая характеристика того же объекта, но с коррекцией.
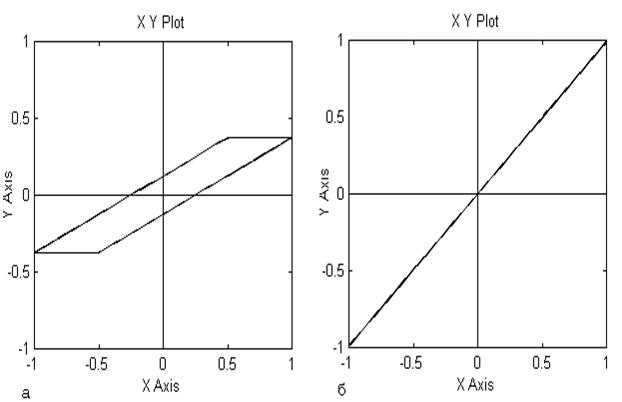
Рис.2 а) статическая характеристика элемента;
б) статическая характеристика того
же элемента, но с коррекцией при KЖ(Р) = 1, KК(P) = 100
Предлагаемая схема коррекции характеристик элементов позволяет не только исключить зону нечувствительности в статической характеристике, но также изменить динамические свойства элемента. На рис.3 приведены результаты моделирования объекта, со статической характеристикой типа "люфт" и инерционным звеном первого порядка. Как видно (рис.3,б) в системе коррекции объект практически становится пропорциональным звеном.
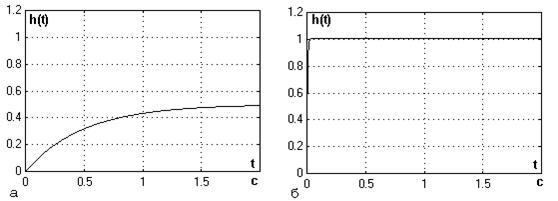
Рис. 3 а) переходная характеристика элемента;
б) переходная характеристика того же элемента
с коррекцией КЖ(Р)=1; КК(Р)=100
Элемент с интегрирующим свойством может быть преобразован в пропорциональное звено (рис.4) и наоборот, пропорциональное звено может быть преобразовано в интегратор (рис.5). Во всех рассмотренных случаях в качестве статической характеристики элемента принята нелинейность типа "люфт" с зоной нечувствительности 1,0.
В тех случаях когда элемент имеет порядок второй и выше, либо когда в элементе есть запаздывание, корректирующее звено следует выбирать из условия устойчивости замкнутого контура, образуемого звеньями КО(Р) и КК(Р).
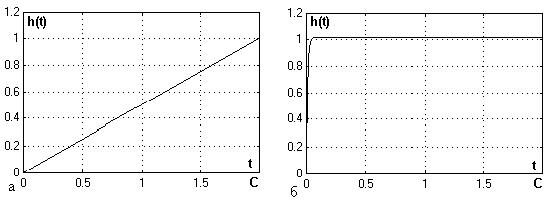
Рис. 4 а) переходная характеристика элемента;
б) переходная характеристика того же элемента
с коррекцией КЖ(Р)=1/Р; КК(Р)=100
На рис.6 приведен пример коррекции характеристики объекта, передаточная функция которого имеет вид:
![]()
Статическая характеристика объекта - нелинейность типа "люфт".
Передаточная функция желаемая принята следующего вида:
![]() .
.
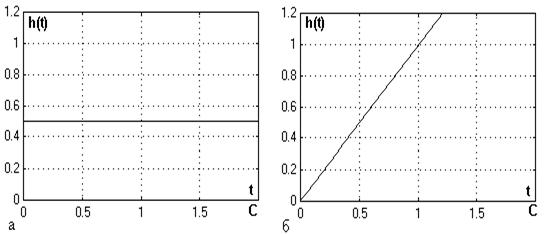
Рис. 5 а) переходная характеристика элемента;
б) переходная характеристика того же элемента,
но с коррекцией КЖ(Р)=1/Р; КК(Р)=100
Передаточная функция корректирующего звена определена из условия минимальной колебательности при минимальном времени переходного процесса:
![]() .
.
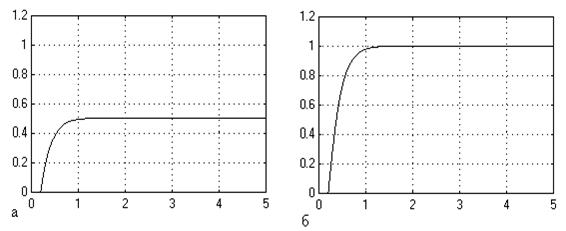
Рис. 6 а) переходная характеристика элемента;
б) переходная характеристика того же элемента с коррекцией
Во всех приведенных примерах моделирование проводилось в пакете MATLAB-Simulink.
|
The block diagram including an any link of system, the reference link and correction link is considered. The scheme allows to receive, under certain conditions, on an output of a corrected link the transitive characteristic close to reference. It is shown, that the considered method of correction allows to compensate to nonlinear of the static characteristic (a zone of tolerance, a hysteresis) to change as necessary dynamic properties of a link. Results of the modeling which has been carried out in package MATLAB-Simulink are submitted. |
1. Кринецкий И.И., Пичугин Е.Д. Исследование автоматического управления курсом судна с учетом нелинейных характеристик системы // Судовождение и связь. Труды ЦНИИ морского флота, - Л.: Транспорт, 1967, вып. 83. – С.13–16.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования- М.: Наука, 1972. – 768 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Моделирование объектов и систем управления
Соколов А.Е., Махова Е.О. Моделирование процесса принятия педагогического решения при компьютеризированном обученииСлавко О.Г. Порівняльний аналіз керування регулятором на основі локальної моделі керованого процесу та П-регулятором
Войтенко В.В., Дикусар Е.В, Ситников В.С. Определение частоты среза устройства сглаживания данных на основе метода скользящего среднего
Передерій В.І. Алгоритм визначення та оцінки характеристик ефективності комп’ютерних систем на початковій стадії проектування в умовах невизначенності
Ляшенко С.А, Ляшенко А.С. Оценка модели псевдолинейной регрессии
Ладієва Л.Р. Математична модель процесу газової мембранної дистиляції
Носов П.С., Косенко Ю.І. Нечіткі моделі і методи ідентифікації та прогнозу стану інформаційної моделі студента
Китаев А.В., Глухова В.И. Анализ работы синхронного двигателя с неявнополюсным ротором по данным каталога
Дорошкевич В.К., Пироженко А.В., Хитько А.В., Хорольский П.Г. К определению требований к системам увода космических объектов
Голінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи керування за імпульсною характеристикою об’єкта
Яшина К.В., Садовой А.В. Комплексная математическая модель тепловых процессов, происходящих в дуговых электросталеплавильных печах
Шейник С.П., Рудакова А.В. Использование функций принадлежности для моделирования параметров распределенных объектов
Хомченко А.Н., Литвиненко Е.И. Метод барицентрического усреднения граничных потенциалов электростатического поля
Селяков Е. Б. Моделирование требований к техническим системам методами математической логики
Тодорцев Ю.К., Ларіонова О.С., Бундюк А.М. Математична модель контура теплопостачання когенераційної енергетичної установки
Кириллов О.Л. , Якимчук Г.С. Моделирование процесса управления системой перегрузки углеводородных жидких топлив
Шеховцов А.Н., Козел В.Н. Построение математической модели формирования распределенных систем
Китаев А.В., Глухова В.И. Анализ поведения генератора постоянного тока по данным каталога
Хомченко А.Н., Козуб Н.О. Задачі наближення функцій: від лагранжевих до серендипових поліномів
Хобин В.А., Титлова О.А. Определение температуры парожидкостной смеси в дефлегматоре АДХМ по результатам измерений температуры его поверхности
Григорова Т.М., Усов А.В. Вероятностно-статистическое моделирование маршрутизированных пассажиропотоков в крупных городах
Горач О.О., Тернова Т.І. Моделювання технологічного процесу одержання трести при використані штучного зволоження з урахуванням складу мікрофлори
Дубік Р.М., Ладієва Л.Р. Математична модель розділення неоднорідних рідких систем
Казак В.М, Лейва Каналес Родриго, Яковицкая Е.Ю. Моделирование динамики полета магистрального самолета на исследовательском стенде
Завальнюк И.П. Исследование процесса торможения автомобиля как критического режима динамической системы
Дмитриев С.А., Попов А.В. Построение портрета неисправностей проточной части газотурбинного двигателя на примере АИ-25
Русанов С.А., Луняка К.В., Клюєв О.І., Глухов Г.М. Математичне моделювання робочого процесу в апаратах з віброкиплячим шаром та розробка систем автоматизованого моделювання гідродинаміки віброкиплячих шарів
Боярчук В.П., Сыс В.Б. Экспериментальные исследования влияния технологии шлихтования на изменение жесткости текстильных нитей
Селін Ю.М. Використовування контекстних марківських моделей для аналізу дії промислових вибухів на будівельні конструкції
Рудакова А.В. Проблемы интеграции сложных систем
Передерій В.І., Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Передерий В.И., Еременко А.П. Математические модели и алгоритмы принятия релевантных решений пользователями автоматизированных систем с учетом личностных и внешних факторов на базе генетических алгоритмов
Михайловская Т.В., Михалев А.И., Гуда А.И. Исследование правил клеточных автоматов для моделирования процессов затвердевания квазиравновесных бинарных сплавов
Хомченко А.Н., Колесникова Н.В. Явление «сверхсходимости» в задаче Прандтля для уравнения Пуассона
Китаев А.В., Глухова В.И. Анализ работы трансформатора по данным каталога
Квасницкий В.В., Ермолаев Г.В., Матвиенко М. В., Бугаенко Б.В., Квасницкий В.Ф. Оценка применимости метода компьютерного моделирования к исследованию напряженно-деформиррованного состояния цилиндрических узлов
Китаев А.И., Глухова В.И. Анализ работы асинхронного двигателя по данным каталога
Шелестов А.Ю Имитационная модель взаимодействия GRID-узлов с очередью доступа к общей памяти
Chizhenkova R.A. Mathematical Aspects of Bibliometrical Analysis of Neurophysiological Investigations of Action of Non-ionized Radiation (Medline-Internet)
Хомченко А.Н., Козуб Н.А. Геометрическое моделирование дискретных элементов с криволинейными границами
Славич В.П. Модель автоматизованої системи управління потоками транспортних засобів
Маркута О.В., Мысак В.Ф. Программная реализация и исследование особенностей метода группового учета аргументов
Степанкова Г.А., Баклан І.В. Побудова гібридних моделей на основі прихованих марківських моделей та нейронних мереж
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Математична модель процесу горіння природного газу з рециркуляцією продуктів згорання для цілей управління
Хомченко А.Н. Новые решения обобщенной задачи Бюффона
Передерий В.И., Еременко А.П. Математические модели и алгоритмы определения релевантности принимаемых решений с учетом психофункциональных характеристик пользователей при управлении автоматизированными динамическими системами
Ложечников В.Ф., Михайленко В.С., Максименко И.Н. Аналитическая много режимная математическая модель динамики газовоздушного тракта барабанного котла средней мощности
Ковриго Ю.М., Фоменко Б.В., Полищук И.А. Математическое моделирование систем автоматического регулирования с учетом ограничений на управление в пакете Matlab
Исаев Е.А., Наговский Д.А. Математическое описание влияния кривизны контактирующих тел на угол смачивания жидкости в межчастичном пространстве
Бідюк П.І., Литвиненко В.І., Кроптя А.В. Аналіз ефективності функціонування мережі Байєса
Тищенко И.А., Лубяный В.З. Математическое моделирование вокодера для определения оптимальной формы импульса сигнала возбуждения.
Николаенко Ю.И., Моисеенко С.В. Моделирование гармонического полиномиального базиса гексагона.
Козуб Н.А., Манойленко Е.С., Хомченко А.Н. Температурный тест для модифицированных базисов бикубической интерполяции.
Клименко А.К. Об упрощенном численном конструировании обратной модели динамического объекта.
Китаев А.В., Сушич Е.Ф. Расчет погрешностей измерительных трансформаторов.
Передерій В.І.,Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Шпильовий Л.В. Математична модель та алгоритм екстремального управління процесом осадження дисперсної фази суспензії.
Тулученко Г.Я. Інформаційний модуль експрес-пошуку точок еквівалентності процесу нейтралізації.
Тернова Т.І. Урахування морфогенетичного рівняння в математичній моделі тканини.
Попруга А.Г. Теоретические и экспериментальные исследования электрических нагревателей по критерию экономии энергии.