УДК 534.442:534.78
УПРАВЛЕНИЕ СОВМЕЩЕНИЕМ ИЗОБРАЖЕНИЯ ОБЪЕКТА В СЦЕНЕ И ЭТАЛОННОГО ИЗОБРАЖЕНИЯ
Бражник Д.А.
Введение. Задача оптимального совмещения изображений возникает при решении задач управления летательными аппаратами [1], транспортными средствами [2], робототехническими комплексами [3] и в других задачах, где заранее известны эталонные изображения объектов, которые могут встретиться в сцене. На сегодняшний день общепринято считать наилучшим критерием качества совмещения изображений объекта и эталона взаимную корреляцию между эталоном и объектом. В практических приложениях, где существенно быстродействие, обычно используется более простая оценка – свертка [4]. Такой подход прост, но весьма требователен к вычислительным ресурсам, что исключает возможность использования простых и недорогих вычислительных систем.
Корреляционный критерий дает хорошее качество оценки, однако он также обладает рядом недостатков – главный из которых – высокие требования к эталонному изображению, т.е. требования равенства масштаба и отсутствия сдвига эталонного изображения и необходимость предварительной нормализации исходного изображения [6].
Однако для нечеткой модели, при использовании корреляции, нет возможности определить качество совмещения, так как невозможно определить причину возникновения ошибки – нарушение условий предъявления или неточность эталонного изображения.
Задача исследования – изучение возможности построения простого критерия совмещения модели и объекта, позволяющего оценить локальные отклонения модели от объекта с невысокими вычислительными затратами.
В рамках метода компенсации информационных потоков [5] для двойственной задачи предполагается использование именно корреляционной меры близости,
|
|
(1) |
где w - множество точек изображения, w*(u) – множество точек эталона, u – управление.
Однако возможно и использование любой другой оценки близости, если ее сходимость обеспечивает сходимость корреляции.
Математический аппарат. Так как компенсация предусматривает генерацию эталонного изображения, рассмотрим генерируемую модель изображения w*i описываемую функцией fi. Причем реально приемник за счет внешних возмущений получает смещенное и деформированное изображение
|
|
(2) |
Здесь r - весовой коэффициент, А – матрица преобразования и х – вектор координат, х0 – смещение.
В общем случае сложная модель представляется суммой элементов изображения
|
|
(3) |
Для реальных условий естественно предположить, что модель не полная – то есть существует некая функция ошибки j, такая, что
|
|
(4) |
Естественно, ошибка возникает или из-за возмущений объекта, или из-за грубости модели.
Корреляционный критерий, при всей своей универсальности, достаточно громоздок в вычислительном плане и не дает возможности определить природу ошибки, особенно если ошибка модели не коррелированна с объектом.
Поэтому в работе использован более простой, но более удобный и функциональный критерий
|
|
(5) |
Здесь, во-первых, сохраняются координаты функции ошибки и, во-вторых, критерий разбивается на два
|
|
(6) |
При этом d1 – ошибка, связанная с неполной компенсацией, а d2 – ошибка, связанная с неточностью модели. Понятно, что возможность использования данного критерия зависит от характера целевой функции. Естественно, что генерируемая в процессе минимизации невязки последовательность управлений тем короче, чем точнее модель соответствует объекту.
|
|
(4) |
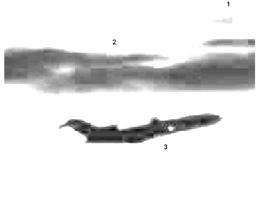
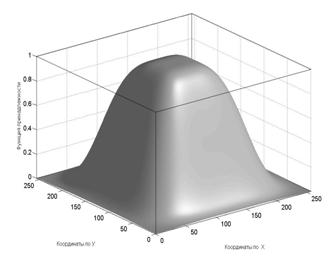
Результаты моделирования. Не останавливаясь на алгоритме фрагментации, описание которого можно найти в [5], рассмотрим три фрагмента одной сцены, приведенной на рисунке 1а. Рассматривая модель фрагментов 1 и 2 как нечеткие множества, используем функцию принадлежности, приведенную на рисунке 1б.
|
|
|
|
Рис.1а Исходная сцена |
Рис. 1б Используемая функция принадлежности |
Так как фрагментация уже выполнена, то неопределенность, связанная с координатами объектов сцены уже снята. Однако, даже для плоского изображения, остаются неопределенными еще четыре элемента матрицы А, весовой коэффициент и собственно вид эталона – выбор гипотезы. Таким образом, необходимо минимизировать критерий по шести переменным.
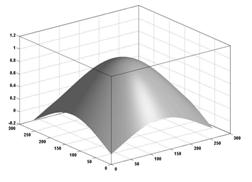
Рассмотрим изображение функции цели для первого фрагмента (рис. 2):
|
|
|
|
а) 120 шагов |
б) 30 шагов |
|
Рис. 2 Изменение критерия при деформациях растяжения – сжатия для фрагмента 1 |
|
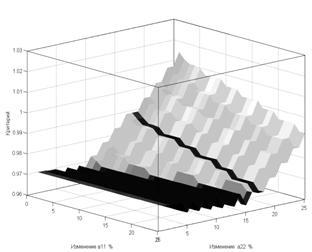
Изрезанность поверхности функции цели вызвана малым разрешением и дискретностью исходного изображения. Как видно из рисунка 2, поверхность функции цели имеет достаточно простую структуру и оптимизация совмещения может поддерживаться простыми процедурами.
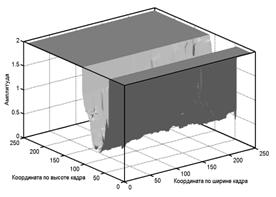
Для большего по размерам фрагмента 2 (рис. 1а) поля освещенности до компенсации и после компенсации, при требовании нулевой ошибки модели, приведены на рисунке 3а, б.
|
|
|
|
Рис. 3а До компенсации |
Рис. 3б После компенсации |
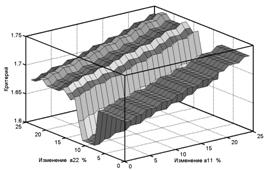
Полученная в данном случае функция цели, (рисунок 4), значительно меньше подвержена колебательности и также имеет простую структуру.
|
|
|
Рис. 4 Вид функции цели для фрагмента 2 |
Гораздо более сложным является случай компенсации для третьего фрагмента.
В качестве модели в данном случае используем скелетный граф модели объекта со связанной с элементами графа функцией принадлежности (рис. 5а, б). Как видно из рисунка, эталонное изображение представляет собой скелетный граф, на ветви которого «натянута» функция принадлежности, представляющая собой пятно со спадающей к краям яркостью, что приводит к весьма размытому изображению.
|
|
|
|
Рис. 5а Вид функции принадлежности |
Рис. 5б Вид модели |

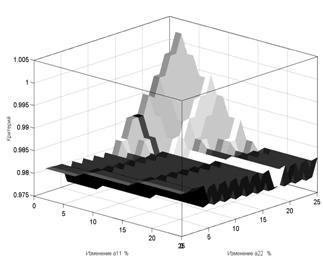
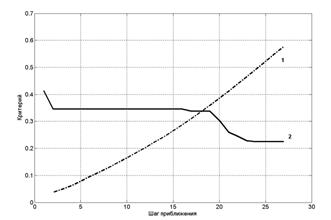
Процедура совмещения эталона и объекта на изображении в данном случае выполнялась от минимального размера модели на поле фрагмента до возникновения существенной ошибки модели. Как показали эксперименты, корреляционный критерий (график 1 на рис. 6) показывает на очень хорошее совпадение модели и объекта, а критерий максимальных отклонений (график 2 на рис. 6) дает гораздо более осторожную оценку. Т.е., можно сказать, что корреляционный критерий является гораздо более «оптимистичным».
|
|
|
Рис. 6 Графики критериев |
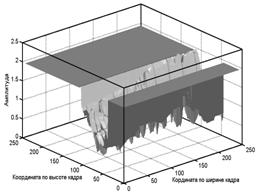
Собственно, ответ на вопрос о различном поведении критериев можно получить, анализируя полученную после компенсации поверхность, рисунок 7.
|
|
|
Рис. 7 Результирующая поверхность |
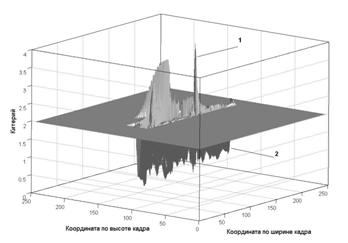
Здесь 1 – ошибка модели и 2 – остаточная некомпенсация.
Но, несмотря на малую чувствительность, результат компенсации поля изображения объекта и моделью, создаваемой генератором эталонов, вполне удовлетворительный, см. рисунок 8.
|
|
|
|
Рис. 8 Совмещение объекта и эталона |
|

Таким образом, после выполнения операций совмещения, система формирует модель всей сцены, рисунки 9а – модель и 9б – исходная сцена.
|
|
|
|
Рис. 9а Модель сцены |
Рис. 9б Исходное изображение |


В таблице 1 приведены значения изменения корреляции и изменения критерия максимального отклонения для двух фрагментов сцены. При этом значения критериев для различных фрагментов сцены
Таблица 1.
Значения критериев для различных фрагментов сцены.
|
Критерий |
Номер фрагмента |
|
|
3 |
2 |
|
|
Изменение корреляции |
0,54 |
-0,1397 |
|
Изменение амплитуды |
0,08 |
0,07 |
|
Шагов процедуры |
25 |
10 |
Следовательно, в данной задаче возможно использовать критерий, по своим экстремальным свойствам эквивалентный корреляции. Однако корреляционный критерий не позволяет определить тип ошибки – т.е. мы можем выделить область с расхождениями модели и объекта, но определить природу этих расхождений мы не можем. Поэтому, с целью определения типа ошибки, мы рассматриваем критерий максимального отклонения (6), более критичный к ошибке – на рисунке 7 сразу видны точки некомпенсированные полностью, точки с частичной компенсацией (2) и перекомпенсированные (т.е. модель имеет в этой точке простой максимум) точки (1).
Выводы:
1. Для задачи совмещения изображений объекта в сцене и эталонного изображения может быть использован критерий максимального отклонения, дающий хорошие результаты при достаточно высокой скорости сходимости алгоритма.
2. Критерий максимального отклонения по своим свойствам близок к корреляции, однако требует меньших вычислительных затрат, что позволяет удешевить систему распознавания в целом.
3. Показано, что критерий максимального отклонения не только позволяет выделить область с ошибкой, но и позволяет определить природу расхождения – связана ли ошибка с объектом или с эталонным изображением.
The questions of building the maximum deviation criterion, intended for evaluation of quality of superposition of the image and model picture, that one is quick enough and have good sensitivity with potential possibility to separate the mistakes, concerned with model and image, are makes out in the article. Also shown, that this criterion demands less computing abilities from the recognition system, than usual correlated criterion.
1. Рапаков Г.В. Использование средств системы MATLAB в исследованиях по безопасности полетов. Труды Всероссийской научной конференции «Проектирование инженерных и научных приложений в среде MATLAB». М.: ИПУ РАН. 2002. 842 с.: ил.
2. Geometric modeling and computer vision/P.J. Besl. Proc. Of the IEEE, 1988, vol. N8, p. 934-958.
3. St. Gh. Pentiuc, Radu Vatavu. Image Processing and Recognition System for a Robot Arm Control. Праці восьмої всеукраїнської міжнародної конференції „Оброблення сигналів і зображень та розпізнавання образів” 28 – 31 серпня 2006р., Київ, Україна. с.167.
4. Хорн К.Б.П. Зрение роботов: Пер. с англ. – М.: Мир, 1989. – 487 с., ил.
5. Бражник Д.А., Фанина Л.А. Использование проективного преобразования при фрагментации изображений сцены. Матеріали науково-практичної конференції „Інтелектуальні системи прийняття рішень та прикладні аспекти інформаційних технологій ISDMIT-2006” 15-18 травня 2006р., м. Євпаторія, Україна: Євпаторія, 2006. Том 1, - с.49
Ответы на вопросы [_Задать вопроос_]
Читайте также
Информационно-измерительные системы
Ковальов О.І. Вимірювання у процесно-орієнтованих стандартахПолякова М.В., Ищенко А.В., Худайбердин Э.И. Порогово-пространственная сегментация цветных текстурированных изображений на основе метода JSEG
Дзюбаненко А. В. Организация компьютерных систем для анализа изображений
Гордеев Б.Н., Зивенко А.В., Наконечный А.Г. Формирование зондирующих импульсов для полиметрических измерительных систем
Богданов А.В., Бень А.П., Хойна С.И. Релаксация обратного тока диодов Шоттки после их магнитно-импульсной обработки (МИО)
Тверезовский В.С., Бараненко Р.В. Проектирование измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Оптимизированная модель измерителя доб-ротности варикапов
Руднєва М.С., Кочеткова О.В., Задорожній Р.О. Принципи побудови оптимальної структури інформаційно-вимірювальної системи геометричних розмірів об’єктів в діапазоні від 1 нм до 1000 нм
Биленко М.С., Рожков С.А., Единович М.Б. Идентификация деформаций пе-риодических структур с использованием систем технического зрения
Рашкевич Ю.М., Ковальчук А.М., Пелешко Д.Д. Афінні перетворення в модифікаціях алгоритму RSA шифрування зображень
Дидык А.А., Фефелов А.А, Литвиненко В.И., Шкурдода С.В., Синяков Ф. В. Классификация масс-спектров с помощью кооперативного иммунного алгоритма
Клименко А.K. Обратная модель для решения задач в системах с многосвязными динамическими объектами
Завгородній А.Б. Порівняльне дослідження твердотільних і рідиннофазних об'єктів методом газорозрядної візуалізації
Голощапов С.С., Петровский А.В., Рожко Ж.А., Боярчук А.И. Измерение доб-ротности колебательного контура на основе метода биения частот
Кириллов О.Л., Якимчук Г.С. Диагностирование критерия безопасности при заполнении замкнутых объемов СПЖ косвенным методом
Долина В.Г. Проблеми підвищення точності рефрактометра на основі прозорих порожнистих циліндрів.
Самков О.В., Захарченко Ю.А. Застосування алгоритму клонального відбору для побудови планів модернізації авіаційної техніки
Попов Д.В. Метод формування регламентів технічного обслуговування повітряних суден
Казак В.М., Чорний Г.П., Чорний Т.Г. Оцінювання готовності технічних об’єктів з урахуванням достовірності їх контролю
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования цифрового измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования устройства для разбраковки варикапов по емкостным параметрaм и добротности
Сосюк А.В. Інтелектуальний автоматизований контроль знань в системах дистанційного навчання
Соколов А.Є. Деякі аспекти систезу комп’ютеризованої адаптивної системи навчання
Полякова М.В., Волкова Н.П., Іванова О.В. Сегментація зображень стохастичних текстур амплітудно-детекторним методом у просторі вейвлет-перетворення
Луцкий М.Г., Пономаренко А.В., Филоненко С.Ф. Обработка сигналов акустической эмиссии при определении положения сквозных дефектов
Литвиненко В.И., Дидык А.А., Захарченко Ю.А. Компьютерная система для решения задач классификации на основе модифицированных иммунных алгоритмов
Лубяный В.З., Голощапов С.С. Прямоотсчетные измерители расхождений емкостей
Беляев А.В. Построение навигации для иерархических структур в WEB-системах и системах управления WEB-сайтом
Терновая Т.И., Сумская О.П., Слободянюк И.И., Булка Т.И. Контроль качества тканей специального назначения с помощью автоматических систем.
Шеховцов А.В. Інформаційний аспект: розпізнавання образів індивідуума.
Полякова М.В. Определение границ сегмента упорядоченной текстуры на изображении с однородным фоном с помощью многоканального обнаружения пачки импульсов.
Литвиненко В.И. Прогнозирования нестационарных временных рядов с помощью синтезируемых нечетких нейронных сетей
Ковриго Ю.М., Мисак В.Ф., Мовчан А.П., Любицький С.В. Автоматизована система діагностики генераторів електростанцій
Браїловський В.В., Іванчук М.М., Ватаманюк П.П., Танасюк В.С. Керований детектор імпульсного ЯКР спектрометра
Забытовская О.И. Построение функции полезности по экспериментальным данным.
Шиманські З. Апаратні засоби сегментації мовного сигналу
Хобин В.А., Титлова О.А. К вопросу измерения парожидкостного фронта в дефлегматоре абсорбционно-диффузионной холодильной машины (АДХМ)
Фефелов А. А. Использование байесовских сетей для решения задачи поиска места и типа отказа сложной технической системы
Слань Ю. М., Трегуб В. Г. Оперативна нейромережна ідентифікація складних об’єктів керування
Ролик А.И. Модель управления перераспределением ресурсов информационно-телекоммуникационной системы при изменении значимости бизнес-процессов
Кириллов О.Л., Якимчук Г.С., Якимчук С.Г. Изучение электрического поля с помощью датчика измерителя электростатического потенциала на модели замкнутого металлического объема
Грицик В.В. Застосування штучних нейронних мереж при проектуванні комп’ютерного зору.
Гасанов А.С. Информационные технологии построения систем прогнозирования отказов
Шеховцов А.В., Везумский А.К., Середа Е.С. Алгоритм сжатия информации без потерь: модифицированный алгоритм LZ77
Ходаков В.Е., Жарикова М.В., Ляшенко Е.Н. Методы и алгоритмы визуализации пространственных данных на примере моделирования распространения лесных пожаров.
Полякова М.В., Крылов В.Н. Обобщённые масштабные функции с компактным носителем в задаче сегментации изображений упорядоченных текстур. – C. 75 – 84.
Полторак В.П., Дорогой Я.Ю. Система распознавания образов на базе нечеткого нейронного классификатора.
Литвиненко В.И. Синтез радиально-базисных сетей для решения задачи дистанционного определения концентрации хлорофилла.
Бабак В.П., Пономаренко А.В. Локализация места положения сквозных дефектов по сигналам акустической эмиссии.
Мороз В. В. R-D проблема и эффективность систем сжатия изображений.
Крылов В.Н., Полякова М.В., Волкова Н.П. Контурная сегментация в пространстве гиперболического вейвлет-преобразования с использованием математической морфологии.
Квасников В.П., Баранов А.Г. Анализ влияния дестабилизирующих факторов на работу биканальной координатно-измерительной машины.
Казак В.М., Гальченко С.М., Завгородній С.О. Аналіз можливості застосування імовірнісних методів розпізнавання для виявлення пошкоджень зовнішнього обводу літака.
Тищенко И.А., Лубяный В.З. Управление коммутационными процессами в интегрированных сетях связи.
Корниенко-Мифтахова И.К.,Филоненко С.Ф. Информационно-измерительная система для анализа характеристик динамического поведения конструкций.
Тверезовский В.С., Бараненко Р.В. Модель измерителя емкости с линейной шкалой измерений.
Полякова М.В., Крылов В.Н. Мультифрактальный метод автоматизированного распознавания помех на изображении.
Рожков С.О., Федотова О.М. Алгоритм розпізнавання дефектів тканин для автоматичної системи контролю якості.
Бражник Д.А. Использование проективного преобразования для автоматизации обнаружения объектов.
Ходаков В.Є., Шеховцов А.В., Бараненко Р.В. Математичні аспекти створення автоматизованої системи „Реєстр виборців України”