УДК 528.7:514.1
Моделювання процесу формування цифрових сканерних зображень дистанційного зондування
Гнатушенко В.В.
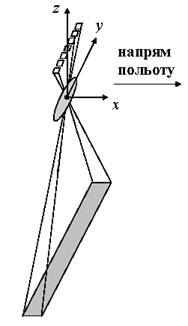
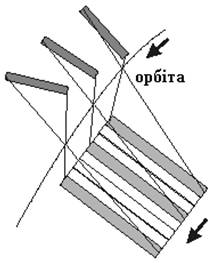
Постановка проблеми. Як відомо, у загальному вигляді в залежності від геометрії побудови знімка можна виділити три види зйомки: кадрова, щілинна, скануюча. При кадровій зйомці усі точки кадру фіксуються в один момент часу (при спрацюванні затвора). Такий знімок має єдиний центр проекціювання та строгу геометрію побудови зображення. При щілинній фотозйомці зображення точок місцевості проектуються об'єктивом фотокамери на фотоплівку через вузьку щілину, що забезпечує печатку одного рядка кадру. Розгорнення зображення здійснюється за рахунок руху або плівки щодо щілини з одночасним переміщенням фотокамери відносно об'єкта зйомки, або щілини уздовж плівки. У скануючих камерах побудова зображення як по рядку так і по кадру відбувається попіксельно, тобто кожна точка фіксується в окремий момент часу та має свій центр проекціювання. Очевидні переваги цифрової зйомки обумовили проведення в даний час активних робіт зі створення цифрових сканерних камер з фотоприймачами на базі матричних і лінійних приладів зарядового зв'язку (ПЗЗ). Особливості сканерних знімків, що відрізняють їх від фотографій або кадрових зображень, обумовлені як геометрією пучка променів, що реєструються нерухомим сенсором, так і рухом сенсора в процесі формування знімка по рядкам. Сканерне зображення суттєво відрізняється від центральної проекції тим, що воно миттєво отримується в межах смуги (рис.1), перпендикулярної до напрямку польоту [1]. Космічний апарат (КА) переміщається в польоті — фіксується наступна смуга (рис.2). Зображення якби “склеєне” з окремих смуг, кожна з яких має свій миттєвий центр проекціювання, і внаслідок нестабільностей сенсорів суцільне зображення є спотвореним.
|
|
|
|
Рис. 1. Одержання знімка окремої смуги ПЗЗ-лінійкою |
Рис. 2. Одержання знімка сцени в результаті руху КА |
Існуючі моделі і методи попередньої обробки кадрових зображень не дозволяють ефективно компенсувати такі перекручування з урахуванням динаміки їхнього формоутворення внаслідок відсутності адекватної фізичної моделі формування сканерних зображень. Це приводить до зниження рівня вірогідності дешифрування об’єктів на цифровому знімку. Зазначені особливості вимагають застосування специфічних алгоритмів для фотограмметричної обробки сканерних знімків.
Аналіз останніх досліджень. Існує два основних підходи до побудови таких алгоритмів: перший пов'язаний з геометричним моделюванням процесу зйомки (внутрішньої геометрії сенсора, орбіти й орієнтації носія) [2], другий — з використанням параметризованих алгебраїчних співвідношень [3, 4]. Алгоритми першої групи звичайно забезпечують кращу точність, хоча існують приклади досить точних методів другої групи, у яких використовуються досить складні співвідношення (наближені значення вхідних параметрів поставляються разом зі знімком). Вибір підходу до обробки визначається складом даних, що супроводжують знімок. У будь-якому випадку для уточнення параметрів знімка використовуються опорні точки (GCP), тобто точки з відомими геодезичними координатами, розпізнані на знімку [5].
Строге моделювання лінійних матричних сканерів вимагає знання параметрів внутрішньої орієнтації (IOP) і параметрів зовнішньої орієнтації (EOP) сканера для кожного зображення в сцені. Компенсувати недостачу такої інформації покликані альтернативні моделі [3, 6], серед яких слід виділити паралельно-проекційну модель, що має певні переваги для наступної обробки сканерних зображень.
Формулювання цілей статті (постановка завдання). Ці обставини ставлять задачу розробки та дослідження властивостей паралельно-проекційної моделі формування цифрових сканерних зображень з урахуванням специфіки їхнього формоутворення.
Основна частина. Спочатку дамо визначення використовуваним термінам “сцена” і “зображення”. Під зображенням будемо розуміти зареєстровані сенсорні дані, пов'язані з одним станом експозиції. Як було зазначено вище, у випадку кадрового зображення існує тільки один такий стан, і, отже, результат - одне повне зображення. У випадку лінійного ПЗЗ-сканера є багато 1-D зображень, кожне з яких пов'язане з різними моментами експозиції. Під сценою будемо розуміти зареєстровані сенсорні дані, пов'язані з одним (як у кадрових зображень) чи більшою кількістю станів експозиції (як у лінійних ПЗЗ-сканерів), що відображають майже безупинний простір об'єкта в окремому дискретному переміщенні датчика. Тому, для випадку кадрових зображень, зображення і сцена - ідентичні поняття, у той час як, для лінійних ПЗЗ-сканерів, сцена - множина послідовних 1-D зображень. Отже, важливо розрізняти координати сцени і координати зображення.
Далі наведемо ті міркування, якими був обумовлений наш вибір паралельно-проекційної моделі. По-перше, це той факт, що переважна більшість космічних сканерів мають вузьку смугу огляду (наприклад, для супутника IKONOS — 0.92°). Зрозуміло, що в такому разі, промені проеціювання в межах сцени можна вважати паралельними. По-друге, космічні сцени фіксуються у стислий час (для IKONOS — менше 1 сек.). Тому можна припустити, що під час експозиції усієї сцени сканер має незмінні елементи зовнішнього орієнтування і, як результат, що площини окремих зображень (смуг) та їх центри проеціювання паралельні. І нарешті, через дуже стислий час фіксації можна вважати, що сканер рухається з постійною швидкістю, в результаті чого однакові відстані у предметній площині відображуються в рівнозначні відстані у картинній площині.
Зв'язок між просторовими характеристиками реального
об’єкта ![]() і координатами об’єкта на знімку
і координатами об’єкта на знімку ![]() для нелінійної
форми паралельно-проекційної моделі має наступний вигляд:
для нелінійної
форми паралельно-проекційної моделі має наступний вигляд:
|
|
(1) |
де ![]() — матриця переходу
від системи координат об'єкта до
картинної системи координат;
— матриця переходу
від системи координат об'єкта до
картинної системи координат; ![]() — відстань між
відповідними точками об'єкта і
зображення;
— відстань між
відповідними точками об'єкта і
зображення; ![]() —
— ![]() -компонента
одиничного проекційного вектора, тобто
-компонента
одиничного проекційного вектора, тобто ![]() .
.
Лінійна форма даної моделі набуває наступного афінного вигляду [2, 3]:
|
|
(2) |
Слід зазначити, що дана форма використовується, коли “доступні” GCP. З іншого боку, при наявності навігаційних даних сканера (елементів зовнішнього орієнтування) краще користатися співвідношенням (1).
Перехід від форми (1) до лінійної
форми (2) здійснюється з проміжним обчисленням параметрів ![]() та наступним знаходженням афінних
параметрів [7]:
та наступним знаходженням афінних
параметрів [7]:
|
|
(3) |
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ,
,
де ![]() — елементи
поворотної матриці
— елементи
поворотної матриці ![]() .
.
Зворотній перехід та отримання паралельно-проекційних параметрів сцени можуть бути здійснені наступним чином. Спочатку знаходимо компоненти проекційного вектора:
|
|
(4) |
де ![]() . Далі знаходимо коефіцієнт
масштабування:
. Далі знаходимо коефіцієнт
масштабування:
|
|
(5) |
де ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;  ;
;  .
.
Нарешті, знаходимо кути орієнтування сцени:
 ;
;  ;
;
 , (6)
, (6)
де ![]() ;
; ![]() ;
; ![]() .
.
Знаючи кут крена ![]() ,
здійснюємо перехід від перспективної до паралельно-проекційної моделі [7]:
,
здійснюємо перехід від перспективної до паралельно-проекційної моделі [7]:
|
|
(7) |
Дана форма використовується для безпосередньої оцінки 2-D афінних параметрів і кута крена сканера. Далі розглянемо альтернативний підхід, що дозволяє одержати паралельно-проекційні параметри сцени, коли доступні елементи зовнішнього орієнтування сканера.
Як було доведено вище, можна припустити, що під час
фіксації сцени космічні сканери рухаються з постійною швидкістю ![]() та збереженням параметрів орієнтування
та збереженням параметрів орієнтування
![]() . Тоді відповідний проекційний вектор
моделі визначається як:
. Тоді відповідний проекційний вектор
моделі визначається як:
|
|
(8) |
де ![]() — елементи поворотної сканерної
матриці.
— елементи поворотної сканерної
матриці.
Матриця переходу ![]() ,
яка фігурує у співвідношенні (1), у загальному випадку не співпадає зі
сканерною матрицею та може бути знайдена наступним чином:
,
яка фігурує у співвідношенні (1), у загальному випадку не співпадає зі
сканерною матрицею та може бути знайдена наступним чином:
|
|
(9) |
де ![]() — одиничні вектори
по координатним осям сцени:
— одиничні вектори
по координатним осям сцени:
![]() ;
; ![]() ;
; ![]() .
.
Коефіцієнт масштабування сцени дорівнює:
|
|
(10) |
де ![]() — середнє значення
висот місцевості сцени.
— середнє значення
висот місцевості сцени.
Нарешті зсув двох сцен визначається наступним чином:
![]() (11)
(11)
де ![]() можуть бути
знайдені за допомогою співвідношення (3).
можуть бути
знайдені за допомогою співвідношення (3).
Висновки та перспективи подальших досліджень. Розроблене спеціалізоване програмне забезпечення, яке реалізує запропоновану паралельно-проекційну модель формування сканерних зображень, дозволяє на наступних етапах автоматично коректувати спотворення, викликані кутовими коливаннями по крену, тангажу і рисканню, що істотно спрощує процедури автоматичної інтерпретації одержуваних зображень та ідентифікації окремих об'єктів на них. Приклади тестування на реальних даних, одержаних зі супутників Spot-5 і Ikonos, підтверджують адекватність та ефективність розробленої моделі і дозволяють оцінити геометричну точність результатів корекції, яка підвищується при застосуванні допоміжного перспективно-паралельного перетворення (7).
Наші подальші дослідження будуть присвячені питанням залежності точності відновлення елементів орієнтування сцени від кількості опорних точок та наступній автоматичній тріангуляції цифрових знімків.
The work is devoted to development and research of properties and capabilities of parallel-projection model of formation digital scanner remote sensing images of in view of their specificity formation.
1. Корчинський В.М. Реконструкція просторових розподілів яскравості багатоспектральних растрових зображень на основі інформаційних критеріїв // Праці VІI Всеукраїнської міжн. конференції з оброблення сигналів і зображень та розпізнавання образів “УкрОбраз-2004”. - Київ: Інститут кібернетики НАН України, 2004. – С. 53-56.
2. Zhang J., Zhang X. Strict geometric model based on affine transformation for remote sensing image with high resolution // International Archives of Photogrammetry and Remote Sensing, 34 (B3), - 2003. - P 309-312.
3. Гнатушенко В.В. Альтернативні геометричні моделі одержання супутникових зображень високого розрізнення // Геометричне та комп’ютерне моделювання. – Харків: ХДУХТ, 2004. – Вип. 8. – С. 48-53.
4. Гнатушенко В.В. Геометричні методи формування зображень високого розрізнення зі супутника IKONOS // Праці Таврійської державної агротехнічної академії. – Мелітополь: ТДАТА, 2004. – Вип. 4, Т.27. – С. 35-39.
5. Гнатушенко В.В., Реута О.В. Геометрія пошуку опорних точок при обробці зображень // Прикладна геометрія та інженерна графіка. – К.: КНУБА, 2003. – Вип. 73. – С. 184-189.
6. Wang Y. Automated triangulation of linear scanner imagery // Joint workshop of ISPRS WG I/1, I/3, IV/4 on sensors and mapping from space. – Hanover, 1999.
7. Morgan M., Kim K., Jeong S., Habib A. Parallel projection modelling for linear array scanner scenes // XXth Congress of ISPRS, 12-23 July, 2004.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Моделирование объектов и систем управления
Соколов А.Е., Махова Е.О. Моделирование процесса принятия педагогического решения при компьютеризированном обученииСлавко О.Г. Порівняльний аналіз керування регулятором на основі локальної моделі керованого процесу та П-регулятором
Войтенко В.В., Дикусар Е.В, Ситников В.С. Определение частоты среза устройства сглаживания данных на основе метода скользящего среднего
Передерій В.І. Алгоритм визначення та оцінки характеристик ефективності комп’ютерних систем на початковій стадії проектування в умовах невизначенності
Ляшенко С.А, Ляшенко А.С. Оценка модели псевдолинейной регрессии
Ладієва Л.Р. Математична модель процесу газової мембранної дистиляції
Носов П.С., Косенко Ю.І. Нечіткі моделі і методи ідентифікації та прогнозу стану інформаційної моделі студента
Китаев А.В., Глухова В.И. Анализ работы синхронного двигателя с неявнополюсным ротором по данным каталога
Дорошкевич В.К., Пироженко А.В., Хитько А.В., Хорольский П.Г. К определению требований к системам увода космических объектов
Голінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи керування за імпульсною характеристикою об’єкта
Яшина К.В., Садовой А.В. Комплексная математическая модель тепловых процессов, происходящих в дуговых электросталеплавильных печах
Шейник С.П., Рудакова А.В. Использование функций принадлежности для моделирования параметров распределенных объектов
Хомченко А.Н., Литвиненко Е.И. Метод барицентрического усреднения граничных потенциалов электростатического поля
Селяков Е. Б. Моделирование требований к техническим системам методами математической логики
Тодорцев Ю.К., Ларіонова О.С., Бундюк А.М. Математична модель контура теплопостачання когенераційної енергетичної установки
Кириллов О.Л. , Якимчук Г.С. Моделирование процесса управления системой перегрузки углеводородных жидких топлив
Шеховцов А.Н., Козел В.Н. Построение математической модели формирования распределенных систем
Китаев А.В., Глухова В.И. Анализ поведения генератора постоянного тока по данным каталога
Хомченко А.Н., Козуб Н.О. Задачі наближення функцій: від лагранжевих до серендипових поліномів
Хобин В.А., Титлова О.А. Определение температуры парожидкостной смеси в дефлегматоре АДХМ по результатам измерений температуры его поверхности
Григорова Т.М., Усов А.В. Вероятностно-статистическое моделирование маршрутизированных пассажиропотоков в крупных городах
Горач О.О., Тернова Т.І. Моделювання технологічного процесу одержання трести при використані штучного зволоження з урахуванням складу мікрофлори
Дубік Р.М., Ладієва Л.Р. Математична модель розділення неоднорідних рідких систем
Казак В.М, Лейва Каналес Родриго, Яковицкая Е.Ю. Моделирование динамики полета магистрального самолета на исследовательском стенде
Завальнюк И.П. Исследование процесса торможения автомобиля как критического режима динамической системы
Дмитриев С.А., Попов А.В. Построение портрета неисправностей проточной части газотурбинного двигателя на примере АИ-25
Русанов С.А., Луняка К.В., Клюєв О.І., Глухов Г.М. Математичне моделювання робочого процесу в апаратах з віброкиплячим шаром та розробка систем автоматизованого моделювання гідродинаміки віброкиплячих шарів
Боярчук В.П., Сыс В.Б. Экспериментальные исследования влияния технологии шлихтования на изменение жесткости текстильных нитей
Селін Ю.М. Використовування контекстних марківських моделей для аналізу дії промислових вибухів на будівельні конструкції
Рудакова А.В. Проблемы интеграции сложных систем
Передерій В.І., Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Передерий В.И., Еременко А.П. Математические модели и алгоритмы принятия релевантных решений пользователями автоматизированных систем с учетом личностных и внешних факторов на базе генетических алгоритмов
Михайловская Т.В., Михалев А.И., Гуда А.И. Исследование правил клеточных автоматов для моделирования процессов затвердевания квазиравновесных бинарных сплавов
Хомченко А.Н., Колесникова Н.В. Явление «сверхсходимости» в задаче Прандтля для уравнения Пуассона
Китаев А.В., Глухова В.И. Анализ работы трансформатора по данным каталога
Квасницкий В.В., Ермолаев Г.В., Матвиенко М. В., Бугаенко Б.В., Квасницкий В.Ф. Оценка применимости метода компьютерного моделирования к исследованию напряженно-деформиррованного состояния цилиндрических узлов
Китаев А.И., Глухова В.И. Анализ работы асинхронного двигателя по данным каталога
Шелестов А.Ю Имитационная модель взаимодействия GRID-узлов с очередью доступа к общей памяти
Chizhenkova R.A. Mathematical Aspects of Bibliometrical Analysis of Neurophysiological Investigations of Action of Non-ionized Radiation (Medline-Internet)
Хомченко А.Н., Козуб Н.А. Геометрическое моделирование дискретных элементов с криволинейными границами
Славич В.П. Модель автоматизованої системи управління потоками транспортних засобів
Маркута О.В., Мысак В.Ф. Программная реализация и исследование особенностей метода группового учета аргументов
Степанкова Г.А., Баклан І.В. Побудова гібридних моделей на основі прихованих марківських моделей та нейронних мереж
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Математична модель процесу горіння природного газу з рециркуляцією продуктів згорання для цілей управління
Хомченко А.Н. Новые решения обобщенной задачи Бюффона
Передерий В.И., Еременко А.П. Математические модели и алгоритмы определения релевантности принимаемых решений с учетом психофункциональных характеристик пользователей при управлении автоматизированными динамическими системами
Ложечников В.Ф., Михайленко В.С., Максименко И.Н. Аналитическая много режимная математическая модель динамики газовоздушного тракта барабанного котла средней мощности
Ковриго Ю.М., Фоменко Б.В., Полищук И.А. Математическое моделирование систем автоматического регулирования с учетом ограничений на управление в пакете Matlab
Исаев Е.А., Наговский Д.А. Математическое описание влияния кривизны контактирующих тел на угол смачивания жидкости в межчастичном пространстве
Бідюк П.І., Литвиненко В.І., Кроптя А.В. Аналіз ефективності функціонування мережі Байєса
Тищенко И.А., Лубяный В.З. Математическое моделирование вокодера для определения оптимальной формы импульса сигнала возбуждения.
Николаенко Ю.И., Моисеенко С.В. Моделирование гармонического полиномиального базиса гексагона.
Козуб Н.А., Манойленко Е.С., Хомченко А.Н. Температурный тест для модифицированных базисов бикубической интерполяции.
Клименко А.К. Об упрощенном численном конструировании обратной модели динамического объекта.
Китаев А.В., Сушич Е.Ф. Расчет погрешностей измерительных трансформаторов.
Передерій В.І.,Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Шпильовий Л.В. Математична модель та алгоритм екстремального управління процесом осадження дисперсної фази суспензії.
Тулученко Г.Я. Інформаційний модуль експрес-пошуку точок еквівалентності процесу нейтралізації.
Тернова Т.І. Урахування морфогенетичного рівняння в математичній моделі тканини.
Попруга А.Г. Теоретические и экспериментальные исследования электрических нагревателей по критерию экономии энергии.