УДК 621.311:681.5
СРАВНИТЕЛЬНЫЙ АНАЛИЗ КОМПЛЕКСНОГО И НЕЧЕТКОГО РЕГУЛЯТОРОВ ПРИ УПРАВЛЕНИИ МНОГОМЕРНЫМ ОБЪЕКТОМ
Михайленко В.С., Ложечников В.Ф.
Известно, что разработка математических моделей сложных многомерных объектов вызывает определенные трудности т.к. значения регулируемых и возмущающих параметров динамичны [1]. К примеру, в передаточной функции участка регулирования температуры перегретого пара за парогенератором постоянные времени, и коэффициент передачи изменяются в 2-3 раза в зависимости от нагрузки [2]. Рассчитанные по известным методам [3] настройки типовых регуляторов для данного класса объектов, требуют коррекции при пуско-наладочных работах и в частых случаях нестационарности действующих на объекты шумов и возмущений. Существует много популярных методик позволяющих производить автоматическую корректировку настроек регуляторов или подбирать оптимальные настройки. В последнее время получили распространение САР с комплексным регулятором, в состав которого входит наблюдатель с фильтром Калмана [4], а также САР с нечетким регулятором [5]. Целью данной статьи является проведение сравнительного анализа эффективности работы комплексного и нечеткого регуляторов при управлении сложным объектом.
Для удобства моделирования САР воспользуемся программным пакетом NCD Simulink (MatLab) [6]. Объект регулирования (Plant and Actuator) (рис. 1) представляет собой последовательно соединенные блоки: нелинейность с функцией ограничения (Saturation), нелинейность динамического ограничения коэффициента усиления - блок (Rate Limiter) и линейное динамическое звено (Plant) описание которого задано через переменные состояния вида:
![]()
![]()
![]()
![]() где X(t) – вектор столбец состояния; А – матрица коэффициентов объекта; В – матрица входа; u(t) – сигнал управления; Y – вектор выхода; С – матрица выхода ; D – матрица влияния входа непосредственно на выход системы (полагают D = 0).Уравнения состояния системы в развернутом виде:
где X(t) – вектор столбец состояния; А – матрица коэффициентов объекта; В – матрица входа; u(t) – сигнал управления; Y – вектор выхода; С – матрица выхода ; D – матрица влияния входа непосредственно на выход системы (полагают D = 0).Уравнения состояния системы в развернутом виде:
-1.03 0.98 -0.94 0.09 0
-1.29 -1.09 2.87 4.79 6.64
X’ = 0.18 -3.82 -2.08 -0.98 X + 0 u
0.41 -4.16 2.54 -1.42 0
![]()
![]() y = -1.78 1.14 0 -1.03 X
y = -1.78 1.14 0 -1.03 X
Матрица управляемости системы имеет следующий вид:
V= [B; AB; A2B…An-1B]
Матрица управляемости может быть построена в MatLab с помощью функции ctrb, которая вызывается командой: V = ctrb(A, B), а детерминант определен функцией det(V) и т.к. детерминант матрицы V= 30800 и отличен от нуля, то система управляема. Метод модального управления предполагает, что все компоненты вектора состояния X могут быть измерены. Однако на практике некоторые компоненты могут быть неизвестны по одной из двух причин:
– измерительных приборов может быть недостаточно;
– некоторые компоненты вектора X могут не иметь физического смысла.
Однако если система является наблюдаемой, то все компоненты вектора X могут быть восстановлены по наблюдениям вектора Y. Система, описываемая матрицами А и С, является наблюдаемой тогда и только тогда, когда существует конечное время Т такое, что начальное состояние X(0) может быть определено в результате наблюдения выходной переменной y(t), при заданном управлении u(t). В случае, когда детерминант матрицы наблюдаемости N = [C; CB; C2B…Cn-1B]T отличен от нуля, система наблюдаема. Матрица наблюдаемости может быть построена с помощью функции obsv, которая также может вызываться командой N = obsv(A, С), а детерминант матрицы N = -20057 и отличен от нуля т.е. система наблюдаема и фильтр Калмана будет эффективен.
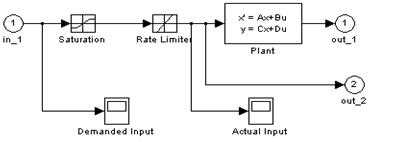
Рис.1 Объект регулирования
Настройка параметров комплексного регулятора, в производственных условиях, (рис.2) является непростой задачей т.к. регулятор имеет сложную структуру: в его состав входит : И – регулятор (Integral action), фильтр Калмана (Kalman estimator), а также многомерное пропорциональное звено (Matrix gain) с матричным коэффициентом усиления К. Для повышения быстродействия в систему введена дополнительная прямая связь от задающего воздействия (пропорциональное звено Feedforward gain с коэффициентом усиления FF). Действие внешних возмущений показано в модели источником шумовых сигналов (Plant Noise) и (Sensor Noise). В качестве задающего воздействия принят единичный импульс.
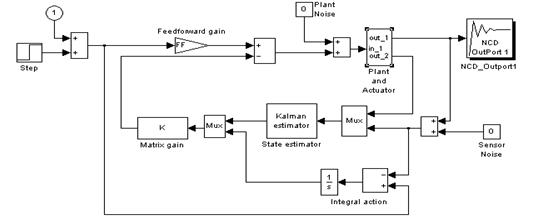
Рис. 2 Структурная схема САР с комплексным регулятором
Синтез системы сводится к нахождению наилучших значений коэффициентов усиления К и FF, при которых к переходному процессу предъявляются следующие показатели качества [6]:
- перерегулирование не превышает 20%;
- время установления – не более 2 с;
- время регулирования – 4 с.
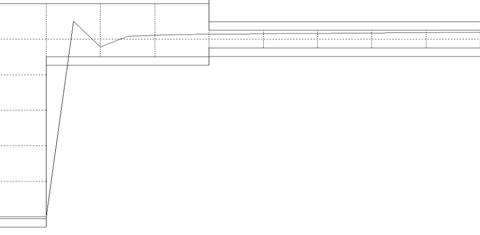
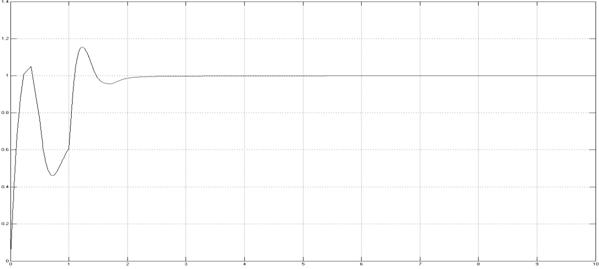
Результат моделирования в блоке NCD, представлен на рис.3
g(t)
![]()
![]()
![]() 1.2
1.2
![]()
![]() 0 1 2 3 4 5 6 7 8 9 t, c
0 1 2 3 4 5 6 7 8 9 t, c
Рис.3 Переходный процесс комплексной САР по каналу задания
Рассчитанные значения оптимальных параметров равны:
K = [-1.0663 0.9551 0.0086 -0.2193 0.0614]
FF = 1.2816 , а переходный процесс САР полностью удовлетворяет заданным критериям.
Для анализа эффективности работы нечеткого регулятора проведем этапы фаззификации и составления базы правил или таблицы лингвистических преобразований.
Нами определены нечеткие множества ошибки e(t), скорости изменения e’(t) и управляющего воздействия uu(t), вышеуказанные нечеткие множества описаны с помощью лингвистического языка, в котором лингвистические переменные (ЛП) или терм-множества следующие: (NB – отрицательно большое , NS – отрицательно среднее, NM – отрицательно малое, Z – нулевое, PS – положительно среднее, PM – положительно малое, PB – положительно большое) (рис. 4 - 6):
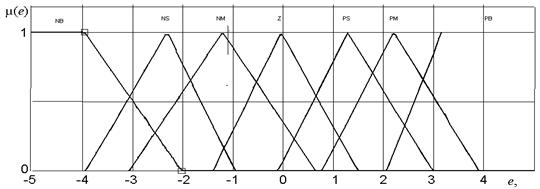
Рис. 4 Функции принадлежности ЛП « ошибка»
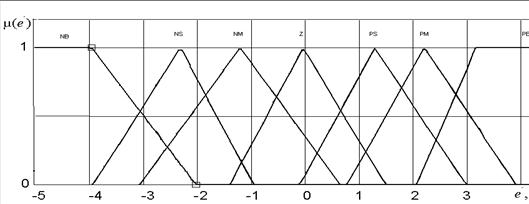
Рис. 5 Функции принадлежности ЛП « производная ошибки»
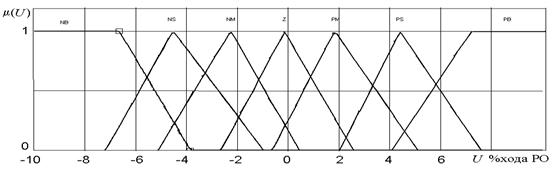 Рис. 6 Функции принадлежности ЛП « управляющее воздействие»
Рис. 6 Функции принадлежности ЛП « управляющее воздействие»
Правила нечеткого регулятора составлены в виде следующих суждений (табл. 1):
ЕСЛИ e(t) NM , И e´(t) NM, ТО Uе(t) NM, ИНАЧЕ;
ЕСЛИ e(t) NB, И e´(t) NB, ТО Uе(t) NB и т.д.
Таблица 1
ТЛП регулятора
|
Отклонение e(t) |
Производная от отклонения, e´(t) |
||||||
|
NB |
NS |
NM |
Z
|
PM |
PS |
PB |
|
|
Uе(t) |
|||||||
|
NB |
NB |
NB |
NB |
OS |
Z |
PM |
PS |
|
NS |
NS |
NS |
NS |
NM |
PM |
PM |
PS |
|
NM |
NS |
NM |
NM |
Z |
Z |
PM |
PS |
|
Z |
NS |
NM |
NM |
Z |
PM |
PM |
PS |
|
PM |
NM |
NM |
Z |
Z |
PM |
PM |
PS |
|
PS |
NM |
NM |
Z |
PM |
PS |
PS |
PS |
|
PB |
NS |
NM |
Z |
PS |
PS |
PB |
PB |
Апробация эффективности базы правил нечеткого регулятора с объектом регулирования (Plant and Actuator) проведена в программе Simulink (рис.7). Переходный процесс представлен на рис.8.
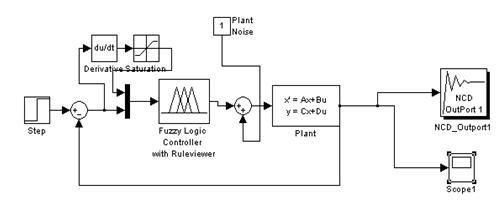
Рис. 7. Структурная схема САР с нечетким регулятором (Fuzzy Logic Controller)
g(s)
 t, c
t, c
Рис.8 Переходный процесс нечеткой САР по каналу задания
Как видно, из рис.3 и 8, т.е обе систему регулирования функционируют одинаково хорошо в ситуации неизменных значений параметров объекта (элементы матрицы А постоянны). Для проверки эффективности комплексной и нечеткой САР, в неопределенной ситуации, проведем эксперимент с введением фактора неопределенности, когда все элементы матрицы А будут изменяться от половины до двух своих номинальных значений (рис.9).
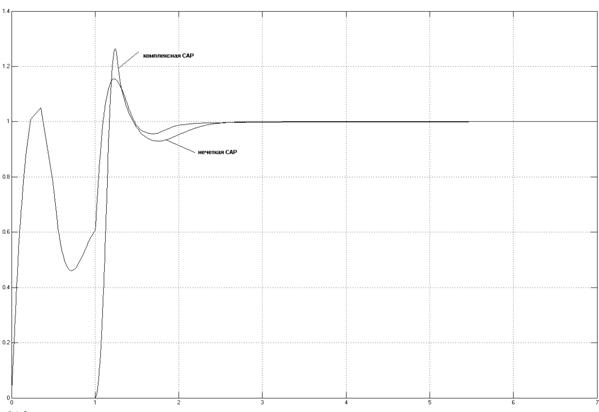
Приходные процессы комплексной и нечеткой САР представлены на рис.10. Анализ процессов показывает, что при одинаковых условиях работы, нечеткий регулятор демонстрирует отсутствие запаздывания и меньшее значения перерегулирования по сравнению с комплексным регулятором.
С учетом того, что массовая промышленная реализация фильтров Калмана затруднена, а настройка регулятора сложной структуры, в процессе пуско-наладочных наладочных работ на объекте, требует участия высококвалифицированного обслуживающего персонала, можно сделать вывод о предпочтительном использовании нечетких контроллеров обладающих простотой реализации конструкции и универсальными алгоритмами программирования.
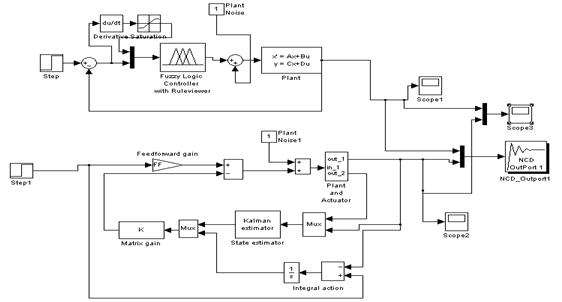
Рис.9 Структурная схема комплексной и нечеткой САР
g(s)
 t, c
t, c
Рис.10 Переходные процессы комплексной и нечеткой САР по каналу задания
The article deals with application of complex system automatic control and fuzzy system control for difficult object. The effect of investigation is elaboration of fuzzy algorithms which have effective regulation in indefinite conditions.
1. Нечеткие множества в моделях управления и искусственного интеллекта //Под. ред. Д.А. Поспелова. - М.: Радио и связь,1982. - 490 с
2. Белов В.В. «Разработка и исследование методов и схем беспоисковой оптимизации АСР в теплоэнергетике на основе анализа ошибок регулирования»: автореферат диссертации на соискание ученой степени кандидата технических наук, Иваново 1984 г.
3. Ротач В.Я., Клюев А.С. Автоматизация настройки систем управления. М.: Энергоиздат, 1998 – 272 с.
4. Олссон Г., Пьяни Дж. Цифровые системы автоматизации и управления. СПб., 2007. - 577 с.
5. Михайленко В.С. Нечеткие контролеры в системах автоматизированного управления. // Холодильная техника и технология. – 2004. - № 3 (98). – с. 79-82.
6. Дьяконов В. Simulink5/6/7. Специальный справочник. М: ДМК, 2008 - 781с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Оптимальное управление объектами и системами
Бойченко О.В. Оптимізація роботи інформаційно-телекомунікаційних систем спеціального призначенняТимченко В.Л. Формирование динамических принципов управления подвижным объектом на основе метода структурно ― переключаемых обратных связей
Лебеденко Ю.О., Рудакова Г.В. Модель нечіткого виводу для оптимального управління перетворювачем частоти в системах автономного живлення
Ладанюк А.П., Кроніковський Д.О. Екстремальна адаптивна система з непараметричною ідентифікацією та багатопараметричним регулятором
Ладієва Л.Р., Дубік Р.М. Оптимальне керування процесом контактної мембранної дистиляції
Писаренко А.В., Дробот І.Ю. Алгоритм синтезу систем зі змінною структурою у ковзному режимі
Погребняк И.Ф. Формализация проблемы управления организационными системами в условиях неопределенности
Батюк С.Г., Олійник С.Ю. Методика оптимальної фільтрації даних температурного контролю турбогенераторів в умовах значних промислових перешкод.
Дорогов А.Ю., Лесных В.Ю., Раков И.В., Титов Г.С. Алгоритмы оптимального движения мобильных объектов по пересеченной местности и транспортной сети
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Мінімізація токсичності продуктів згорання та втрат теплоти у топкових пристроях з рециркуляцією продуктів згорання на основі узагальненого критерію оптимізації
Луцька Н.М., Заєць Н.А., Ладанюк А.П. Синтез та порівняння багатовимірних регуляторів для колонної дифузійної установки цукрового заводу.
Корнієнко Б.Я., Снігур О.В. Оптимізація параметрів процесу зневоднення і гранулоутворення в апараті псевдозрідженого шару
Ладієва Л.Р., Зав'ялова Т.П. Оптимізація плівкового апарату роторного типу за максимальною продуктивністю
Лебеденко Ю.О. Оптимальне управління безпосереднім перетворювачем частоти за критерієм мінімізації негативного впливу на живильну мережу
Тарасюк В.П., Алдохіна А.С. Основні положення методики побудови оптимального розкладу управління обладнанням паралельних технологічних процесів на основі експертних оцінок.
Стопакевич А.А. Новые соотношения для синтеза цифровых оптимальных одномерных систем управления для объектов с запаздыванием.
Ладієва Л.Р.,. Жулинський О.А Оптимізація установки контактної мембранної дистиляції.
Батурінець Є. В., Пасенченко Ю. А. Управління матеріальними запасами з обмеженнями на складські приміщення
Смітюх Я.В., Кишенько В. Д. Оптимізація управління процесами брагоректифікації.
Рябкин Ю.В, Карнаух В.В. Квазиоптимальная обработка коротких радиоимпульсов в акустооптическом спектроанализаторе.
Песчанский А.И. Оптимальное техническое обслуживание двухкомпонентной параллельной системы с учетом наработки каждого элемента.
Лебеденко Ю.А. Исследование непосредственного преобразователя частоты с оптимальным управлением.
Исаев Е.А., Чернецкая И.Е., Завальнюк О.П. К вопросу принятия решений при оптимизации гранулирования рыбной муки в барабане.
Кириллов О.Л., Якимчук Г.С. Оптимальное управление технологическим процессом заполнения слабопроводящими заряжающимися жидкостями (СПЗЖ) замкнутых объемов.
Водічев В.А. Порівняльний аналіз швидкодії алгоритмів керування у системі оптимізації технологічного процесу металообробки.
Поливода О.В., Бражник А.М. Метод компенсации ошибок идентификации при оптимальном управлении
Марасанов В.В., Забитовская О.И., Щербина Е.В. Энтропийные методы оптимизации гравитационных моделей.
Балтовский А.А. Синтез оптимального закона управления большой системой на основе композиции локальных оптимальных решений
Луцька Н.М. Синтез оптимальних регуляторів для систем автоматизації технологічних комплексів неперервного типу.
Кондратенко Г. В., Кондратенко Ю. П., Мухортова К. В. Синтез нечетких регуляторов на основе объектно-ориентированных технологий.
Чернецкая И.Е., Исаев Е.А., Лебеденко Ю.А. Система автоматической оптимизации окомкования железорудного концентрата в условиях ЦГОКа
Червинський В.В., Бессараб В.І. Ієрархічна система оптимального управління установкою з газифікації вугілля методом напівкоксування з циркулюючим киплячим шаром
Усов А. В., Дубров К. А. Оптимизация и управление термомеханическими процессами при получении феррокерамических изделий для отклоняющих систем
Кучеров Д.П. Алгоритм обучения субоптимальному по быстродействию управлению динамической системой второго порядка без нулевых полюсов
Ладанюк А.П., Луцька Н.М., Лобок О.П. Розробка багатовимірних оптимальних регуляторів для об'єктів одного класу.
Маломуж Т.В. Оптимальное управление на основе интеллектуальных систем
Марончук И.Е., Кучерук А.Д., Данилец Е.В., Ерохин С.Ю., Чорный И.В. Опти-мизация двухкоординатных позиционно-чувствительных фотоприемников.