УДК 621.643.001.24
УПРАВЛЕНИЕ ГИБКИМИ ПРОТЯЖЕННЫМИ ОБЪЕКТАМИ
НАПРАВЛЕННЫМИ СИЛОВЫМИ ВОЗДЕЙСТВИЯМИ
Блинов Э.И., Кравцов В.И., Кравцов А.В., Недбайло А.Н.
Постановка проблемы
Развитие техники и технологии разведки и добычи энергоносителей со дна морей обусловило эффективность широкого освоения углеводородных ресурсов континентального шельфа. В экономической зоне акваторий Черного и Азовского морей обнаружено и прогнозировано 400 объектов нефтегазодобычи. Согласно программе “Освоения углеводородных ресурсов украинского сектора акваторий Черного и Азовского морей" добыча нефти до 2015 года может увеличиться до 3.2 млн. т. ежегодно [1]. Одним из важных предпосылок освоения нефтегазовых ресурсов шельфа является построение сети магистральных трубопроводов. Область применения способов укладки подводных трубопроводов может быть расширена с увеличением допустимой глубины путем применения специальных методов, что позволяет уменьшить изгибающие напряжения в трубопроводе. Для геологической разведки шельфа, обследования и ремонта трубопроводов широкое применение нашли привязные управляемые необитаемые спускаемые аппараты. Все эти длинномерные конструкции являются гибкими пространственно искривленными объектами, управление которыми, в частности их позиционирование при технологических процессах, имеет важное народно-хозяйственное значение. Анализ их напряженно-деформированного состояния необходим для выбора рациональной технологической схемы, разработки новых методов погружения трубопроводов на значительные глубины, создания принципиально новых управляемых глубоководных привязных систем.
Анализ последних исследований
Аналитические методы расчета гибких подводных объектов имеют давнюю историю. Наиболее широкое распространение получила методика, созданная С.И. Левиным [2]. Согнутый участок гибкого объекта рассматривается как балка на двух опорах. При этом учитывается, что в предельных точках (точка выхода на поверхность и точка касания дна) кривизна и угол поворота упругой оси по отношению к горизонтальной оси равно нолю. Предусматривается, что глубина погружения значительно меньшая, чем длина согнутой части гибкого элемента, которая принимается равной ее проекции на горизонтальную ось. П.Л. Терещенко [3] рассмотрел три характерных участка трубопровода: а) тот, что плавает; б) тот, что находится под водой и не касается дна; в) тот, что лежит на грунте. Наиболее значительный вклад в решение задач пространственного деформирования привязных спускаемых аппаратов и управления ими внес Магула В.Э. [4]. Им впервые в данной области предпринята попытка алгоритмизировать вычисления с помощью ЭВМ, однако использовались лишь аналитические методы вычислений. При математическом описании процесса погружения обычно составляют уравнение упругой линии для отдельных (двух или трех) участков гибкого объекта. При составлении и решении уравнений авторами делается ряд предположений, которые в определенной степени влияют на точность выведенных соотношений и решений. Решаемые задачи принадлежат, как правило, к плоскому случаю, не учитывается возможность пространственного деформирования вследствие действия внешних технических или естественных нагрузок. Прямое использование вектора внешних нагрузок, которое предлагается различными авторами, без критического анализа возможностей и области применения такого представления приводит в ряде случаев к неточным или даже неверным записям компонентов этого вектора. Классическим обобщением теории гибких стержней можно считать труды Попова и Светлицкого [5],[6]. Ими решены основные задачи, встречающиеся при расчетах напряженно-деформированного состояния, устойчивости и динамики гибких стержней. Однако, аналитические методы сейчас нельзя считать достаточно алгоритмичными, решение любой новой задачи требует больших усилий при математических вычислениях, временных затрат. Поэтому наиболее перспективным в данном направлении можно считать применение численных методов.
Формулировка целей
В процессе погружения подводных гибких объектов следует учитывать не только технические условия, но и механические нагрузки, которые возникают из-за влияния ветра, волнения моря, морских течений и маневров плавсредств. Сложные и тяжелые режимы эксплуатации гибких элементов сопряжены, как правило, с необходимостью специального изучения и определения действующих на них сил, учета сильной нелинейности разрешающих уравнений, возможности потери устойчивости равновесия и с требованием исследования поведения системы в закритических состояниях. Дифференциальные уравнения, описывающие их деформирование, имеют высокий порядок и содержат нелинейности сложного вида. Поиск их решения аналитически часто становится невозможным, что побуждает широко привлекать методы вычислительной математики. Решение таких задач оказывается возможным только современными методами нелинейного анализа, применение которых побуждает к выбору модификации разрешающих уравнений, обеспечивающих алгоритмичность и эффективность используемых подходов. До настоящего времени указанные исследования не получили необходимого развития из-за отсутствия достоверных математических моделей, которые достаточно просто и эффективно реализуются в виде алгоритмов и программ для численного решения рассматриваемых задач. Для описания влияния гидрометеосреды необходима адекватная пространственно-временная математическая модель изменения волнения, ветра и течения. Эта модель должна позволять воспроизводить реальные внешние условия как на коротких (секунды, минуты), так и на длинных (до года) интервалах времени с учетом вероятностной природы основных характеристик гидрометеосреды. Целью данной статьи является описание численного метода решения задачи управления гибким пространственно искривленным объектом при целенаправленных силовых воздействиях.
Методика исследования
В данной статье рассматривается математическая модель, основанная на известных подходах, описанных в [7]. В плане применения современных вычислительных алгоритмов она позволяет создать унифицированные методы исследования деформирования гибких подводных объектов, которые позволяют учитывать:
- неограниченность пространственного упругого деформирования;
- физико-геометрические параметры элементов с произвольными вдоль оси значениями изгибной и крутильной жесткостями;
- действие статических, квазистатических или динамических нагрузок, как угодно расположенных в пространстве;
- действие нагрузок от течения, волн, ветра, гидростатического давления.
Математическая модель базируется на известных подходах Лагранжа и Эйлера, которые описывают равновесие и деформирование гибкого элемента, его внешнюю и внутреннюю геометрию. Опишем кратко метод исследования.
Введем ![]() ,
, ![]() ,
, ![]() - естественный трехгранник с единичными ортами главной нормали и касательной;
- естественный трехгранник с единичными ортами главной нормали и касательной; ![]() - орты подвижного трехгранника;
- орты подвижного трехгранника;![]() ,
, ![]() - векторы внутренних усилий и моментов; p, q, r - кривизны относительно орт подвижного трехгранника; x, y, z – координаты независимой переменной s.
- векторы внутренних усилий и моментов; p, q, r - кривизны относительно орт подвижного трехгранника; x, y, z – координаты независимой переменной s.
Представим систему разрешающих уравнений, которые описывают деформирование гибкого элемента, в виде
![]() (1)
(1)
где ![]()
![]() - вектор состояния (
- вектор состояния (![]() ), f - вектор-функция правых частей системы уравнений; l - параметр интенсивности возмущения (нагружения), штрихом обозначена производная по s. Параметр l может быть как действительным, так и формальным, который отображает количественные характеристики задачи.
), f - вектор-функция правых частей системы уравнений; l - параметр интенсивности возмущения (нагружения), штрихом обозначена производная по s. Параметр l может быть как действительным, так и формальным, который отображает количественные характеристики задачи.
Сформулированная таким образом в области ![]() изменения независимой переменной s система разрешающих уравнений (1) имеет общий восемнадцатый порядок. Наличие шести первых интегралов
изменения независимой переменной s система разрешающих уравнений (1) имеет общий восемнадцатый порядок. Наличие шести первых интегралов
![]() (2)
(2)
позволяет уменьшить ее порядок до двенадцатого. Методика решения поставленной задачи основана на совместном использовании метода продолжения по параметру и метода Ньютона-Канторовича. На краю s = 0 интервала 0 s S изменения переменной s заданы шесть независимых краевых условий ![]() и шесть вытекающих из первых интегралов уравнений связи
и шесть вытекающих из первых интегралов уравнений связи ![]() . Для замыкания системы уравнений достаточно на краю s = S задать шесть независимых краевых условий
. Для замыкания системы уравнений достаточно на краю s = S задать шесть независимых краевых условий ![]() . В сформулированных краевых уравнениях
. В сформулированных краевых уравнениях ![]() обозначают шестимерные векторы-функции.
обозначают шестимерные векторы-функции.
Пусть при некотором значении ![]() известно решение
известно решение ![]() . Дадим малое приращение
. Дадим малое приращение ![]() параметра . Тогда соответствующую ему вариацию
параметра . Тогда соответствующую ему вариацию ![]() решения
решения ![]() можно найти из линейного уравнения
можно найти из линейного уравнения
![]() (3)
(3)
полученного линеаризацией системы разрешающих уравнений. Краевые уравнения для
функции ![]() формируются линеаризацией начальных нелинейных краевых уравнений
формируются линеаризацией начальных нелинейных краевых уравнений
![]() . (4)
. (4)
Для построения ![]() выберем среди составляющих
выберем среди составляющих ![]() такие шесть компонент
такие шесть компонент ![]() , любые значения которых
, любые значения которых ![]() не изменяют первые два векторные уравнения системы (4). Перенумеруем неизвестные
не изменяют первые два векторные уравнения системы (4). Перенумеруем неизвестные ![]() так, чтобы индекс j принимал значения j =1,2,3,...6. Тогда решение задачи (4) представим в виде
так, чтобы индекс j принимал значения j =1,2,3,...6. Тогда решение задачи (4) представим в виде
![]() (5)
(5)
где ![]() - решение задачи Коши для системы
- решение задачи Коши для системы
![]() (6)
(6)
при нулевых начальных условиях, Y(s) - матрица размера m6 решений системы
![]() (7)
(7)
с начальными условиями ![]() для независимых переменных, для других переменных -
для независимых переменных, для других переменных - ![]() Вектор постоянных
Вектор постоянных ![]() подбирается из уравнений
подбирается из уравнений
![]() . (8)
. (8)
Выбирая состояние ![]() как порождающее, вариацией параметра его можно продолжить на величину
как порождающее, вариацией параметра его можно продолжить на величину ![]() . Поскольку
. Поскольку ![]() найден с использованием линеаризованных уравнений, то решение
найден с использованием линеаризованных уравнений, то решение ![]() будет удовлетворять условиям поставленной задачи приблизительно с невязками. При практической реализации решения построение матриц Y(s) на каждом шаге варьирования параметра осуществляется методом Рунге-Кутта четвертого порядка. Количество шагов интегрирования и точек дискретизации по длине элемента зависит от многих факторов: глубины погружения, количества и характера, действующих по длине нагрузок, меры нелинейности процесса и тому подобное. Практическая реализация метода осуществлена в виде программ расчета на ЭВМ.
будет удовлетворять условиям поставленной задачи приблизительно с невязками. При практической реализации решения построение матриц Y(s) на каждом шаге варьирования параметра осуществляется методом Рунге-Кутта четвертого порядка. Количество шагов интегрирования и точек дискретизации по длине элемента зависит от многих факторов: глубины погружения, количества и характера, действующих по длине нагрузок, меры нелинейности процесса и тому подобное. Практическая реализация метода осуществлена в виде программ расчета на ЭВМ.
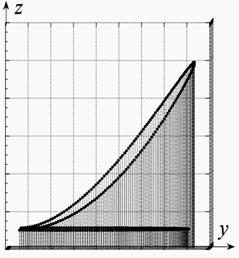
Представленная методика численного расчета позволяет осуществлять управление гибкими протяженными объектами, заключающееся в следующем. Известно, что первоначально пространственно криволинейный объект сохраняет свою форму до тех пор, пока на него не воздействует какое-то силовое поле. Наиболее часто применяемые в настоящее время способы воздействия – это управление положением объекта с помощью гибких связей, принадлежащих одному, а чаще - нескольким судам-носителям. Такой метод является достаточно громоздким и дорогим, предъявляет большие требования к условиям гидрометеосреды. Более экономичным представляется метод управления гибкими объектами с помощью установленных на них устройствах, позволяющих за счет силовых воздействий на участки объекта приложением в различных сечениях нагрузок (сосредоточенных или моментных) изменять их положение по заранее предполагаемому закону. Для установления предполагаемой формы объекта необходимо заранее оперативно рассчитать его напряженно-деформированное состояние, после чего с помощью средств контроля уточнять его технологическое положение. Покажем процесс расчета на примере решения задачи пространственного деформирования первоначально плоского элемента под действием сосредоточенных и пространственно направленных нагрузок. Схема такого нагружения показана на рис. 1.
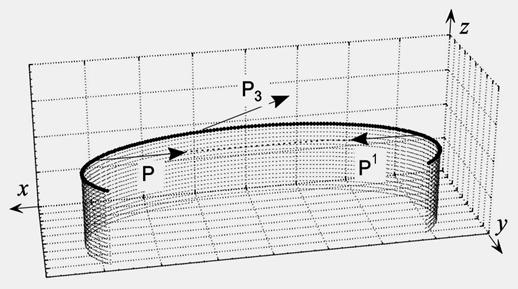
Рис.1 Внешний вид и схема нагружения гибкого элемента
Построение его геометрии осуществлено с помощью методики, описанной в [7], согласно которой исследуемый участок кривой является частью лемнискаты Бернулли. Следует подчеркнуть, что таким образом можно задавать геометрию кривой практически любой конфигурации. Здесь P=P1 - сосредоточенные, равные и противоположно направленные силы, «стягивающие» два произвольно выбранных сечения элемента. Их действием достигается требуемое деформирование объекта в плоскости xy.
Сила P3 осуществляет пространственное позиционирование из плоскости xy и направлена произвольно в пространстве, т.е. ![]() , где Px = kxP, Py = kyP, Pz = kzP; kx ky kz – коэффициенты пропорциональности, обозначающие распределение части исходного значения силы Р по ее составляющим.
, где Px = kxP, Py = kyP, Pz = kzP; kx ky kz – коэффициенты пропорциональности, обозначающие распределение части исходного значения силы Р по ее составляющим.
Полученные результаты
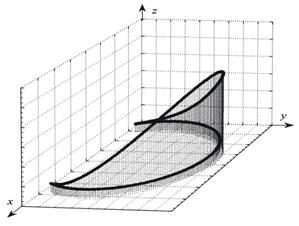
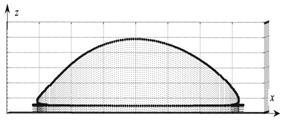
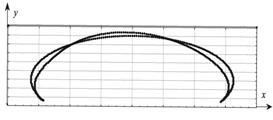
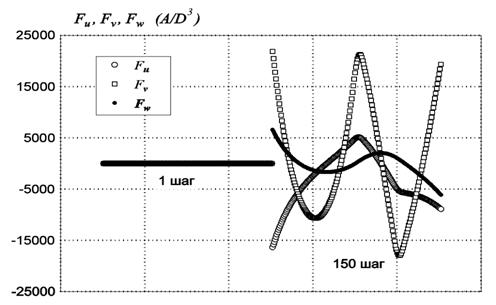
Будем считать, что в начальной стадии гибкий объект (гибкий трубопровод) находится в равновесии и сохраняет свою первоначальную форму. Вследствие приложения нагрузок P=P1 он деформируется в плоскости, принимая форму продольной оси, значительно отличающуюся от первоначальной. После некоторой достигнутой формы для уточнения его пространственного положения прикладывается сила P3. Для численного решения такой задачи по всей длине элемента задается 300 точек дискретизации. При этом проводится пошаговое интегрирование с дискретной нагрузкой Р - аналога параметра ![]() (3). После определенного шага нагружения путем запоминания промежуточного решения прикладывается сила P3 и далее решение продолжается при действии всех приложенных нагрузок. Результаты такого решения представлены на рис.2.
(3). После определенного шага нагружения путем запоминания промежуточного решения прикладывается сила P3 и далее решение продолжается при действии всех приложенных нагрузок. Результаты такого решения представлены на рис.2.
Следует отметить, что каждый шаг интегрирования отображается графически на экране дисплея, что позволяет визуально контролировать предполагаемое пространственное положение объекта и сравнивать его с действительным.
|
|
|
в) г) Рис.2 Формы продольной оси деформированного гибкого элемента в аксонометрическом изображении (а) и в проекциях на плоскости xz (б) , xy (в), yz (г) Кроме того, в любой момент деформирования можно отобразить все внутренние силовые факторы на дисплее в виде таблиц или графиков (рис.3). Результаты расчетов показывают эффективность представленной методики. Ее достоверность косвенно определяется сходимостью решений дифференциальных уравнений и кроме того отображена на естественности графического отображения результатов. Анализируя усилия, показанные на рис.3, можно сделать вывод о сильной нелинейности процесса. Таким же образом можно при необходимости изобразить графически и внутренние моменты в любом сечении на любом шаге. Приняв шаг интегрирования достаточно малым, можно осуществить контроль напряженно-деформированного состояния на всем этапе деформирования с необходимой дискретностью нагружения. Практика использования методики при решении тестовых задач показала, что для достаточной уверенности в достоверности получаемых результатов необходимо убедиться в сходимости интегрирования разрешающих уравнений. Одним из таких признаков является визуальное наблюдение с помощью компьютерной графики за геометрией объекта непосредственно в процессе решения на любом шаге интегрирования. Если по каким-то причинам (неправильно выбраны начальные условия, неправильно заданы нагрузки, неправильно выбрана величина шага нагрузки и тому подобное) задача численно не решается, то это, кроме программного контроля, сразу отображается на дисплее компьютера в виде нелогично расположенных геометрических форм объекта. Рис.3 Внутренние усилия в сечениях гибкого элемента в недеформированном состоянии (1-й шаг) и в конце деформирования (150-й шаг) Применяя предложенную методику, можно без значительной перестройки вычислительных алгоритмов менять характер действия нагрузок, получать необходимые параметры напряженно-деформированного состояния гибких элементов. При некоторых реально возникших обстоятельствах (например, при приложении любой нагрузки, потере устойчивости, изменении жесткости вследствие аварии) возникает необходимость прекратить решение и после изменения определенных параметров задачи возобновить его опять, начиная с прерванного шага. Алгоритм разработанных подпрограмм предусматривает возможность изменения действия нагрузки на любом шаге числового интегрирования при помощи „запоминания" предыдущего шага, а также на любом интервале совокупности точек дискретизации. Простота использования, наглядность, скорость получения результатов делают методику удобной для использования инженерами при расчетах и технологических работах. Is Worked up a methods of numeral research of stressed-deformed applied flexible, at will elements distorted in space attached to their change position by method of influence by concentrated static loadings. For mathematical deforming description is built a system of unlinear usual differential equalizations of high order, decision of which is based on numeral realization of initial equalizations by dint of varying of leading parameter on each step. Are Brought the task decision results. 1. Коростель г. П., Крупский Б.Л., Гладун В.В. Дальнейшие поисково-разведывательные работы на нефть и газ в акваториях Черного и Азовского морей (украинский сектор) // Нафт. и газовая промышленность. 2001. - №4. с. 6-9. 2. Левин С.И. Проектирование и строительство подводных трубопроводов. - М.: Гостоптехиздат, 1960. - 63 с. 3. Терещенко П.П. Укладка подводных трубопроводов способом свободного погружения. - М.: Недра, 1965. - 67 с. 4. Магула В.Э. Блинцов В.С. Проектирование самоходных привязных подводных систем. - Киев: Наукова думка, 1997. - 139 с. 5. Попов Е.П. Нелинейные задачи статики тонких стержней. - М.: ОГИЗ, 1948. - 178 с. 6. Светлицкий В.А. Механика трубопроводов и шлангов: Задачи взаимодействия стержней с потоком жидкости или воздуха. - М.: Машиностроение, 1982. - 279 с. 7. Кравцов В.И. Механика гибких морских конструкций. Киев: Наукова думка, 1999. – 132с.
Выводы
Ответы на вопросы [_Задать вопроос_]
Читайте также
Современные технические средства, комплексы и системы
Краснов В.А., Прохорович А.В., Шутов С.В., Деменский А.Н. Анализ флуктуаций размера растущего кристалла (на примере легированных монокристаллов кремния, вытягиваемых из расплава по методу Чохральского)Завальнюк И.П. Управление высокопроизводительной экструзией неоднородных материалов
Долина В.Г., Писаренко А.В. Синтез складної багатовимірної системи управління випарною станцією на основі рефрактометричних вимірювань
Стопакевич А.А., Тодорцев Ю.К. Анализ современного состояния систем управления брагоректификационными установками спиртового производства
Поливода В.В. Современные компьютерные технологии в АСУ на хлебоприёмном предприятии
Ладанюк А.П., Українець А.І., Кишенько В.Д. Управління автоматизованими технологічними комплексами харчових виробництв на основі сценарного підходу
Ковриго Ю.М., Фоменко Б.В. Врахування обмежень для підвищення якості функціонування систем регулювання енергоблоків ТЕС і АЕС
Евдокимов А.В., Китаев А.В., Агбомассу В.Л. Исследование причин, определяющих вращение рамки с током в магнитном поле после воздействия на нее внешнего импульса
Аппазов Э.С. Применение твердых растворов InGaN в фотовольтаике
Кузнєцов Ю.М., Дмитрієв Д.О. Програмно математичний апарат керування виконавчим органом багатокоординатних верстатів нових компоновок
Черевко О.И., Ефремов Ю.И., Одарченко А.М., Одарченко Д.М, Агафонова Ю.Ю. Теоретическое обоснование перспективного биконического резонатора для СВЧ-устройств при переработке растительного сырья
Хобин В.А. Бабиков А.Ю. Системы экстремального управления молотковыми дробилками с функцией гарантированного соблюдения тепловых режимов их электродвигателей.
Стадниченко В.Н. Исследование влияния изменения эксплуатационных нагрузок на свойства металлокерамических слоёв полученных с использованием трибовосстанавливающих составов
Ісаєв Е.А., Наговський Д.А., Чернецька І.Е. До вибору факторів, що характеризують окомкування тонкоподрібнених залізорудних матеріалів
Федоровский К.Ю., Лунев А.А. Теплоотдача погружного пластинчатого теплообменника системы охлаждения энергоустановок морских технических средств
Федоровский К.Ю., Владецкий Д.О. Интенсификация теплоотвода замкнутых систем охлаждения энергоустановок морских технических средств.
Пономарьов Я.Ю., Ладанюк А.П., Іващук В.В. Досвід використання нечітких регуляторів в системі атоматизації випарної установки.
Левченко А.А., Кравчук О.И. Эквивалентный макромодуль процесса технического обслуживания радиотехнических средств.
Іволгіна Т.О. Енергетичний підхід до аналізу стійкості руху вимірювальної головки координатно-вимірювальної машини
Ладанюк А.П., Кишенько В.Д., Ладанюк О.А. Системна задача управління біотехнологічними процесами.
Тернова Т.І. Алгоритм оцінювання деформацій рапорту періодичних об'єктів
Рожков С.А., Федотова О.Н. Алгоритм обучения системы распознавания автоматической системы разбраковки тканей
Пупена О.М, Ельперін І.В, Ладанюк А.П. Особливості проектування комп’ютерно-інтегрованих систем управління
Квасніков В.П., Кочеткова О.В. Проектування координатно–вимірювальної машини на нейронних мережах
Водічев В.А., Мухаммед М.А. Дослідження системи стабілізації потужності різання металообробного верстата з фази-регулятором
Шутов С.В., Аппазов Э.С., Марончук А.И., Самойлов Н.А. Методика испытания термофотовольтаических преобразователей
Хобин В.А. Повышение качества формирования смесей средствами интеллектуализации алгоритмов управления порционным дозированием
Терновая Т.И. Автоматическая система разбраковки тканей с печатным рисунком методом компенсации информационных потоков
Рожков С.А., Бражник Д.А. Использование нейросетевых структур для построения систем распознавания образов
Місюра М.Д., Кишенько В.Д. Математичні моделі технологічних процесів пивоварного виробництва як об’єктів автоматизації
Ладанюк А.П., Власенко Л.О. Автоматизоване управління бізнес-процесами в комп’ютерно-інтегрованих структурах підприємства
Жукова Н.В., Литвинов В.І. Вирішення проблеми погодженого руху валків з неоднаковими катаючими діаметрами профілезгинальних станів
Денисова А.Е., Тодорцев Ю.К., Максименко И.Н. К вопросу об автоматизации интегрированной установки теплоснабжения с возобновляемыми источниками энергии
Бессараб В.И. Компьютеризированная система управления водоотливным хозяйством угольных шахт по критерию минимума энергозатрат
Хобин В.А. Регулятор переменной структуры для объектов технологического типа
Тонконогий В.М. Трехконтурная АСУ нанесением ионно-плазменного покрытия на режущий инструмент.
Колесникова Е.В., Кострова Г.В. Формирование базы данных АСУТП дуговой сталеплавильной печи.
Водічев В.А. Автоматизована система керування швидкостями робочих рухів то-карного верстата для підвищення ефективності обробки торцевих поверхонь.
Бергер Е.Г., Дмитрієв Д.О., Бергер Є.Е., Діневич Г.Ю. Синтез строфоїдографів за методом параметричних сімей.
Бабак В.П., В.Н. Стадніченко, О.Г. Приймаков Прогнозування надійності, дов-говічності та витривалості авіаційних матеріалів
Бабак В.П., Стадниченко В.Н., Приймаков О.Г., Токарчук В.В. Прогнозування витривалості авіаційних матеріалів .
Куцак Р.С. Використання методу координатного еталону в задачах автоматизації контролю якості тканини.
Попруга А.Г. Усовершенствование электрических нагревателей по критерию экономии энергии.
Пашковский А.А., Далечин А.Ю. Система регистрации спектров фотолюминес-ценции
Никольский В.В., Цюпко Ю.М. Применение пьезоэлектрических датчиков в сис-теме кондиционирования воздуха судовых систем микроклимата.
Крапивко Г.И., Хлопёнова И.А. Повышение коэффициента полезного действия кремниевых фотоэлектронных преобразователей методом лазерной гравировки.
Кихтенко Д.А. Управление шаговыми двигателями в микрошаговом режиме, оп-тимизация управления.
Горохов В.А. Автоматизированная транспортно-складская система в текстильной и легкой промышленности.
Водічев В.А. Система стабілізації потужності різання фрезерного верстата з взаємозв'язаним керуванням швидкостями робочих рухів.
Шутов С.В., Аппазов Э.С., Марончук А.И. Испытание фотоэлектрических преобразователей в условиях экстремальных температурных колебаний.
Худяев А.А. К проблеме повышения точности воспроизведенияв классе многоканальных воспроизводящих систем с эталонной настройкой каналов.
Тверезовський В.С., Бараненко Р.В. Принцип побудови елементів вимірювальних систем, представлених цифровими програмно керованими давачами.
Никольский В.В., Сандлер А.К. Моделирование процессов в вискозиметре с пьезоэлектрическим приводом.
Марончук И.Е., Андронова Е.В., Баганов Е.А., Курак В.В. Использование метода импульсного охлаждения насыщенного раствора-расплава для формирования наноразмерных структур InSb в матрице GaSb.
Водічев В.А. Аналого-цифровий регулятор режиму металообробки для верстатів з числовим програмним керуванням.