УДК 519-7
ОБ ИСПОЛЬЗОВАНИИ ДИСКРЕТНОЙ ОБРАТНОЙ МОДЕЛИ В СИСТЕМАХ С ИНТЕГРИРУЮЩИМ ЗВЕНОМ
Введение. Для решения ряда задач автоматического управления и диагностики требуется применение обратной модели (ОМ) динамического объекта (ДО). Идеальная ОМ реального объекта, как известно [1], неосуществима. На аналоговых средствах техники удавалось создавать лишь приближенные ОМ для ДО, описываемых уравнениями не выше второго порядка. Применение средств дискретной вычислительной техники позволило найти технические решения ОМ [2,3], приближающихся к идеальным и не зависящих от порядка описываемых ДО уравнений.
Известные технические решения относятся к объектам, которые устойчивы Но существуют объекты, для которых отсутствуют технические решения по созданию ОМ. К таким объектам относится интегрирующее звено.
В данной работе рассматриваются технические решения по применению ОМ в непрерывных следящих системах, содержащих интегрирующее звено.
Анализ известных решений. Если динамический объект является непрерывным и описывается передаточной функцией ![]() , то для идеальной ОМ его справедлива формула:
, то для идеальной ОМ его справедлива формула: ![]() . В работе [3] показано, что для реального динамического объекта возможно создание приближенной ОМ, отличающейся от идеальной только чистым временным запаздыванием и описываемой передаточной функцией
. В работе [3] показано, что для реального динамического объекта возможно создание приближенной ОМ, отличающейся от идеальной только чистым временным запаздыванием и описываемой передаточной функцией
![]() . (1)
. (1)
где ![]() - время запаздывания.
- время запаздывания.
Технического решения по созданию такой модели на аналоговых средствах автоматики и вычислительной техники предложено не было. Предложено только техническое решение [3] по осуществлению приближенной ОМ на средствах дискретной вычислительной техники. При конструировании используется следующее условие. Создается инструментальная схема из последовательно соединенных ОМ и ДО. Формируется такое математическое описание ОМ, при котором выходной сигнал ДО в дискретные моменты времени повторяет входной сигнал ОМ с временным запаздыванием:
![]() ,
,
где n – дискретное время, ![]() - входной сигнал ОМ,
- входной сигнал ОМ, ![]() - выходной сигнал ДО,
- выходной сигнал ДО, ![]() - конструктивный временной сдвиг, представляющий собой дробную часть дискретного времени.
- конструктивный временной сдвиг, представляющий собой дробную часть дискретного времени.
Предполагается, что ДО, для которого требуется создать ОМ, линейный, стационарный, устойчив, а также может обладать чистым временным запаздыванием. В качестве исходного математического описания ДО выступает его переходная характеристика (ПХ) ![]() , именуемая также и кривой переходного процесса. ПХ может быть получена как различными аналитическими способами, так и методами электронного моделирования или технического эксперимента. Она представлена в непрерывном времени. На рис.1 изображен типовой график такой ПХ.
, именуемая также и кривой переходного процесса. ПХ может быть получена как различными аналитическими способами, так и методами электронного моделирования или технического эксперимента. Она представлена в непрерывном времени. На рис.1 изображен типовой график такой ПХ.
В качестве параметров ПХ, используемых при конструировании ОМ и показаных на рисунке, относятся:
hust – установившееся значение переходного процесса,
τ0 – чистое временное запаздывание ДО (если оно имеется),
Δ – малая величина, принимаемая за допустимую ошибку,
T1 – время переходного процесса ![]() ,
,
hmax – максимальное значение переходного процесса.
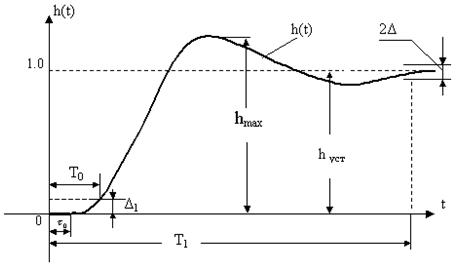
Рис. 1 Типовая переходная характеристика ДО
Для решения задачи конструирования ОМ необходимо также ввести параметр Т0 – конструктивный временной сдвиг ДО. Он должен превышает чистое временное запаздывание ДО (Т0 > τ0) и удовлетворять требованиям:
![]() ,
, ![]() ,
,
где ![]() – непрерывное время,
– непрерывное время, ![]() конечная постоянная величина.
конечная постоянная величина.
В качестве исходных данных при постановке задачи приведём и краткие сведения о техническом решении ОМ, описанном в [4]. ОМ является замкнутой импульсной системой, конструктивными параметрами которой выступают дискретность времени Т и конструктивный временной сдвиг T0. Для осуществления ОМ составляется математическое описание скорректированного ДО, который сдвинут относительно исходного в сторону опережения и физически осуществим. Скорректированный ДО в дискретном времени описывается импульсной переходной функцией (ИПФ), которая является реакцией на входное воздействие в виде кратковременного импульса единичной площади. Числовой массив ИПФ может быть получен из кривой переходного процесса ДО h(t):
![]() ,
, ![]() , (2)
, (2)
где T – дискретность (шаг квантования) времени,
n – дискретное время (![]() ,
, ![]() –моменты непрерывного времени, кратные Т),
–моменты непрерывного времени, кратные Т),
N1 – время затухания переходного процесса (![]() ),
),
τ – конструктивный временной сдвиг в сторону опережения, переведенный в дискретное время (![]() ).
).
При выполнении данной работы используется известная из [4] ОМ ДО. Она описывается математической зависимостью:
 ,
, ![]() , (3)
, (3)
где ![]() и
и ![]() – соответственно входной и выходной сигналы ОМ,
– соответственно входной и выходной сигналы ОМ,
k(∙) – ИПФ ДО,
![]() ,
,
![]() ,
,
![]() установившееся значение ПХ ДО,
установившееся значение ПХ ДО,
![]() – переменная суммирования.
– переменная суммирования.
Как показано в [4], ОМ, описываемая выражением (3), обеспечивает устойчивость работы при изменении параметров Т и Т0 в широких пределах. Значения этих параметров можно выбирать из соображений обеспечения желаемых показателей качества создаваемой ОМ.
ОМ, описываемая выражением (3), отличается от идеальной. Основное отличие состоит в том, что ПХ ОМ обладает запаздыванием. Это запаздывание не является чистым. Поэтому в непрерывном времени ОМ может быть лишь приближенно описана передаточной функцией (1). Она работает в дискретном времени, но, при достаточно высокой частоте квантования, приближенно может быть записана в виде:
![]() . (4)
. (4)
При последовательном соединении ОМ, описываемой выражением (4), с ДО, общая передаточная функция комплекса «ОМ—ДО» может быть приближенно представлена в виде единичного звена с запаздыванием:
![]() . (5)
. (5)
В формулах (4) и (5) символ ![]() уже представляет собой не чистое временное запаздывание, а продолжительность временного интервала переднего фронта кривой переходного процесса комплекса «ОМ-ДО». Величина временного запаздывания
уже представляет собой не чистое временное запаздывание, а продолжительность временного интервала переднего фронта кривой переходного процесса комплекса «ОМ-ДО». Величина временного запаздывания ![]() может быть получена весьма малой и составлять лишь несколько процентов или доли одного процента от времени переходного процесса ДО.
может быть получена весьма малой и составлять лишь несколько процентов или доли одного процента от времени переходного процесса ДО.
Таким образом, реализуемая по формуле (3) ОМ может выступать эффективным средством улучшения показателей качества динамических объектов.
Рассматриваемая ОМ может быть осуществлена только для устойчивого ДО, ИПФ которого (2) затухает на участке [0,N1]. Интегрирующее звено не является устойчивым. Поэтому возникает проблема использования ОМ (3) для улучшения динамических характеристик следящих систем, содержащих интегрирующее звено.
Исходные данные и постановка задачи. Рассмотрение задачи применения ОМ проведем на примере осуществления следящей системы, инвариантной относительно входного воздействия. Такая система описана в работе [1]. Ее структурная схема изображена на рис.2. В состав системы входят первый и второй динамические объекты, описываемые соответственно передаточными функциями ![]() и
и ![]() , а также корректирующее звено по входному воздействию с передаточной функцией
, а также корректирующее звено по входному воздействию с передаточной функцией ![]() .
.
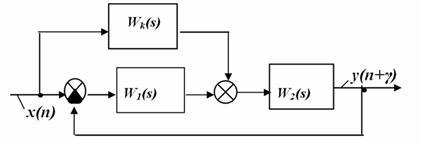
Рис. 2 Структурная схема следящей системы, инвариантной по входному воздействию
Система по рис.2 будет инвариантной, если удастся осуществить такое корректирующее звено, которое представляет собой ОМ второго ДО, т.е.
![]() , (6)
, (6)
где ![]() является символом обратной модели.
является символом обратной модели.
В случае выполнения условия (6) следящая система по рис.2 становится идеальной, а ее передаточная функция, как можно показать структурными преобразованиями, становится равной единице.
Но условие (6) на известных технических решениях не может быть выполнено из-за того, что второй динамический узел содержит интегрирующее звено ![]() , а его передаточная функция может быть представлена в виде:
, а его передаточная функция может быть представлена в виде:
![]() , (7)
, (7)
где ![]() - остаточное динамическое звено, которое является устойчивым.
- остаточное динамическое звено, которое является устойчивым.
Задачей данной работы является такое преобразование структурной схемы по рис.2, при котором становится возможным использование ОМ (3) для обеспечения инвариантности следящей системы. Правила структурных преобразований системы изложены, например, в [5].
Предлагается два варианта решения поставленной задачи.
Первый вариант заключатся в том, что делается такое структурное преобразование системы по рис.2, при котором для обеспечения ее инвариантности достаточно реализовать ОМ остаточного звена с передаточной функцией ![]() .
.
При втором варианте структурная схема преобразуется с таким укрупнением ее элементов, что интегрирующее звено оказывается элементом более сложного, но устойчивого динамического звена.
За счет применения ОМ следящая система должна стать быстродействующей и приближенно описываться передаточной функцией элемента с малым временным запаздыванием (5).
Результаты исследования. Рассмотрим оба варианта возможных структурных преобразований следящей системы с использованием ОМ.
На рис.3 изображена структурная схема системы с использованием ОМ остаточного звена, передаточная функция которого ![]() определяется выражением (7). Поскольку остаточное звено устойчиво, для него может быть построена кривая переходного процесса, найден числовой массив ИПФ по формуле (2) и осуществлена ОМ с использованием математической зависимости (3). Получаемая ОМ обладает неизбежным временным запаздыванием, а ее передаточная функция приближенно может быть представлена в виде:
определяется выражением (7). Поскольку остаточное звено устойчиво, для него может быть построена кривая переходного процесса, найден числовой массив ИПФ по формуле (2) и осуществлена ОМ с использованием математической зависимости (3). Получаемая ОМ обладает неизбежным временным запаздыванием, а ее передаточная функция приближенно может быть представлена в виде:
![]() ,
,
где ![]() - временное запаздывание ОМ.
- временное запаздывание ОМ.
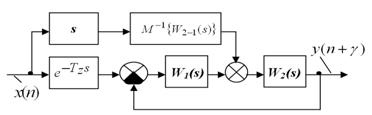
Рис. 3 Структурная схема следящей системы с ОМ остаточного звена
В связи с отсутствием в остаточном звене интегрирующего звена в контур коррекции вводится дифференцирующее звено с передаточной функцией s. Для компенсации временного запаздывания ОМ, существующего в контуре коррекции, на вход основного контура следящей системы вводится элемент аналогичной временной задержки с передаточной функцией ![]() .
.
Вводимое в корректирующий контур дифференцирующее звено с передаточной функцией ![]() без затруднений реализуется на средствах компьютерной техники. В качестве примера может выступать схема, состоящая из элемента временной задержки на величину
без затруднений реализуется на средствах компьютерной техники. В качестве примера может выступать схема, состоящая из элемента временной задержки на величину ![]() , узла вычитания и умножителя на коэффициент
, узла вычитания и умножителя на коэффициент ![]() .
.
При помощи структурных преобразований следящая система по рис.3 может быть приведена к простому динамическому звену с приближенной передаточной функцией
![]() .
.
За счет применения ОМ следящая система становится быстродействующей и приближенно описываться передаточной функцией элемента с малым временным запаздыванием (5), что сформулировано в постановке задачи исследования.
Второй вариант корректировки следящей системы с применением ОМ поясняется структурной схемой, изображенной на рис. 4. Она получена из структурной схемы по рис.2 путем перемещения корректирующего звена с передаточной функцией ![]() на вход следящей системы.
на вход следящей системы.
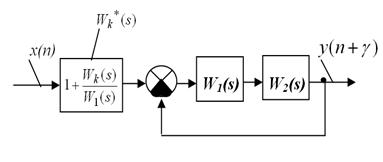
Рис. 4 Структурная схема системы с использованием ОМ всей системы
В результате структурного преобразования на входе следящей системы появляется новое корректирующее звено, описываемое передаточной функцией
![]() . (8)
. (8)
Преобразуем выражение (8) в предположении, что в системе выполняется условие инвариантности (6). Тогда передаточная функция нового корректирующего звена получит вид:
![]() . (9)
. (9)
Можно показать, что описываемое выражением (9) новое корректирующее звено представляет собой обратную модель динамической системы из охваченных обратной связью объектов с передаточными функциями ![]() и
и ![]() . Передаточная функция указанной динамической системы имеет вид
. Передаточная функция указанной динамической системы имеет вид
![]() ,
,
из чего следует, что корректирующее звено (9) является ее обратной моделью.
Было проведено моделирование обеих изображенных на рис.2 структурных схем следящей системы. По своим характеристикам обе схемы близки между собой, но вторая из них проще в реализации.
Рассмотренные технические решения основаны на использовании компьютерных технологий. Программные средства требуются как для конструирования обратных моделей, так и в обеспечении их функционирования. Часть вычислительных операций может быть перенесена со стадии функционирования на стадию разработки, что позволяет упростить продукт разработки.
Рассмотрим пример. ОМ, описываемая зависимостью (3), представляет собой замкнутую динамическую систему. Ее можно преобразовать в простое динамическое звено следующим образом. Создается числовой массив ИПФ МО. Для этого на вход системы (3) подается кратковременный импульс единичной площади (![]() ), а снимаемые на выходе значения сигнала
), а снимаемые на выходе значения сигнала ![]() регистрируются как числовой массив ИПФ МО. Обозначим его символом
регистрируются как числовой массив ИПФ МО. Обозначим его символом ![]() и по формуле (3) найдем для него выражение:
и по формуле (3) найдем для него выражение:
 (10)
(10)
Если числовой массив ИПФ по формуле (10) получен еще на стадии проектирования, то действующая согласно рис.4 ОМ становится простым динамическим звеном и функционирует по известной [6] формуле разомкнутой импульсной системы:
![]() ,
,
где ![]() и
и ![]() - соответственно выходной и выходной сигналы ОМ.
- соответственно выходной и выходной сигналы ОМ.
Экспериментальная часть. Изложенные материалы проверены экспериментально компьютерным моделированием. В качестве иллюстрации приводим пример улучшения показателей качества следящей системы посредством установки на ее входе ОМ, как это показано на рис.4.
Исходная следящая система описывается передаточной функцией
![]()
![]()
и имеет ПХ
![]() .
.
Основными показателями качества исходной системы являются: время переходного процесса ![]() , перерегулирование
, перерегулирование ![]() и длительность переднего фронта ПХ до момента пересечения с линией установившегося значения
и длительность переднего фронта ПХ до момента пересечения с линией установившегося значения ![]() .
.
Целью установки ОМ на входе следящей системы было улучшение ее показателей качества. Система считается идеальной, если ее ПХ представляет собой единичную ступенчатую функцию.
При конструировании ОМ была задана ее дискретность времени ![]() , а конструктивный временной сдвиг был выбран
, а конструктивный временной сдвиг был выбран ![]() для обеспечения минимума переходного процесса. У скорректированной следящей системы получены следующие показатели качества: время переходного процесса уменьшено в десятки раз (
для обеспечения минимума переходного процесса. У скорректированной следящей системы получены следующие показатели качества: время переходного процесса уменьшено в десятки раз (![]() ), перерегулирование практически устранено (
), перерегулирование практически устранено (![]() ), а длительность переднего фронта ПХ уменьшена вдвое (
), а длительность переднего фронта ПХ уменьшена вдвое (![]() ). Для иллюстрации преимуществ скорректированной следящей системы перед исходной на рис.5 показаны их ПХ. Символами
). Для иллюстрации преимуществ скорректированной следящей системы перед исходной на рис.5 показаны их ПХ. Символами ![]() и
и ![]() обозначены ПХ соответственно исходной и скорректированной систем. Переходная характеристика скорректированной системы, изображенная сплошной линией, заметно приближается к единичной ступенчатой функции.
обозначены ПХ соответственно исходной и скорректированной систем. Переходная характеристика скорректированной системы, изображенная сплошной линией, заметно приближается к единичной ступенчатой функции.
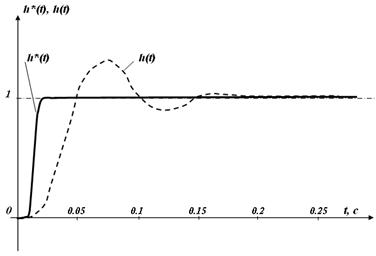
Рис. 5 Переходные характеристики следящей системы до ее корректировки (пунктирная линия) и после корректировки
Выводы. В следящих системах, содержащих интегрирующее звено, возможно использование приближенной дискретной модели для обеспечения инвариантности управления относительно входного воздействия. Такая возможность достигается посредством структурных преобразований. За счет оптимального выбора параметров используемой ОМ можно резко повысить динамические качества следящей системы. Увеличивается быстродействие, а перерегулирование может быть сведено к желаемому минимуму. Корректирующий контур без затруднений может быть реализован на программных или аппаратных средствах дискретной вычислительной техники.
ЛИТЕРАТУРА
1. Зайцев В.Г., Костюк В.И., Чинаев П.И. Основы автоматического управления и регулирования. – Киев: «Техніка», 1975. – С. 235-239.
2. Клименко А.К., Клименко В.Г. Корректирующее устройство. – Авт. свид. СССР №1406563.– Бюллетень изобретений, 1988 , №24.
3. Клименко А.К. Обратная модель для решения задач управления и контроля качества / Методы менеджмента качества // Надежность и контроль качества. – 1999, №8. – С. 32-39.
4. Клименко А.К. Об упрощенном численном конструировании обратной модели динамического объекта // Автоматика. Автоматизация. Электротехнические комплексы и системы. – 2007, №1. – С. 16-24.
5. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд. третье, исправленное. – М.: Наука, 1975. – С. 113-117.
6. Цыпкин Я.З. Теория линейных импульсных систем. – М.: Физматгиз, 1963. – С. 267-269.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Цифровые и дискретные системы управления
Кочкарьов Ю.О., Кущ С.О., Панаско О.М. Ефективна схемотехніка цифрових вузлів елемента додавання кон’юнкціїГолінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи із цифровим регулятором на заданий показник коливності
Щокін В.П. Метод оцінки максимального запізнення елементів фільтрованого входу нейроемуляторів з зовнішньою динамікою
Ситников В.С., Брус А.А. Анализ коэффициентов перестраиваемого цифрового фильтра нижних частот второго порядка.
Бобриков С.А., Воевода А.Б., Лебедева Т.А. Расчет цифрового управляющего устройства для линейного объекта с запаздыванием
Усов А.В., Ситников В.С. Возможности построения передаточных функций линейных цифровых частотно-зависимых вторичных преобразователей по частотным характеристикам
Орлов В.В. Экономичная реализация обнаружителей сигналов на основе решетчатых фильтров
Ситников В.С. Анализ путей уменьшения погрешностей цифровых устройств с фиксированной точкой.
Ситников В.С. Реализация цифрового фильтра высокого порядка в каскадной форме по критерию минимума выходного шума квантования.
Орлов В.В. Влияние квантования обучающих выборок на эффективность цифровых адаптивных фильтров компенсации помех.
Ситников В.С. Оценка верхней границы ошибок квантования в цифровом фильтре с фиксированной точкой.