УДК 519.7
ОБ УСТРАНЕНИИ КОЛЕБАТЕЛЬНОСТИ АДАПТИВНОЙ СИСТЕМЫ В ПРОМЕЖУТКАХ ДИСКРЕТНОГО ВРЕМЕНИ
Клименко А.К.
1. Постановка проблемы и ее связь с практическими заданиями. Известны автоматизированные технологические объекты (АТО), в которых управление осуществляется по циклически повторяющимся программам. Примерами таких АТО являются металлорежущие станки с программным управлением и станы горячей прокатки. Управляющие программы готовятся в условиях неполной информации об объекте управления и возмущающих воздействиях. Поэтому требуется корректировка управляющих программ как во время их разработки, так и в процессе эксплуатации. Системы, в которых осуществляется такая корректировка, называются системами с изменяемой программой (1), системами с самоустанавливающейся программой [2], самонастраивающимися системами «от детали к детали» [3] и адаптивными системами [4]. В данной статье будем называть их системами с адаптивной корректировкой управляющих программ.
Существуют технологические процессы, в которых измерение ошибки воспроизведения программы возможно лишь в промежутках между циклами ее воспроизведения. Примером может служить обработка деталей сложной форме на станках с числовым программным управлением. При корректировке текущей программы используется информации об ошибках в предыдущих циклах ее воспроизведения. Эти ошибки суммируются с исходной программой при помощи дискретного интегратора.
Имеется ряд проблем, препятствующих практическому применению адаптивных систем этого класса. Эти проблемы отличаются друг от друга. Для их преодоления требуются различные технические решения. Такие решения имеются, но решение конкретной проблемы, как правило, затрудняет решение смежной проблемы или порождает новую проблему. Требуются такие технические решения, которые решают одновременно более одной проблемы и помогают решению других смежных проблем.
В данной работе рассматривается техническое решение двух проблем: обеспечение максимально высокой скорости процесса адаптации и устранение ошибок в промежутках дискретного времени.
2. Анализ известных решений. Было выполнено значительное количество работ по отдельным проблемам адаптивной корректировки циклически повторяющихя управляющих программ. Для пояснения известных технических решений на рис.1 приведена общая структурная схема адаптивной системы. Символами на схеме обозначены: УП – управляющая программа, АТО – автоматизированный технологический объект, ТМР – таймер, ДИ – дискретный интегратор.
Система по рис.1 функционирует следующим образом.
Управляющая программа ![]() состоит из N кадров дискретного времени (
состоит из N кадров дискретного времени (![]() ). Она циклически повторяется и не изменяется от цикла к циклу.
). Она циклически повторяется и не изменяется от цикла к циклу.
АТО является непрерывным, но его выходной сигнал оценивается в дискретные моменты времени:
![]() ,
, ![]() , n=0,1,2,…,N,
, n=0,1,2,…,N,
где γ – дробная часть дискретного времени.
Ошибки могут быть измерены как одновременно с выполнением программы (на прокатном стане), так и в промежутках между циклами (металлорежущие станки). Ошибка каждого цикла воспроизведения программы регистрируется в буферной памяти. Регистрируется только ее значения в привязке к дискретным моментам времени:
![]() ,
, ![]() ,
,
где ν – номер цикла воспроизведения программы.
На основании зарегистрированной ошибки в формирователе вычисляется и подается на вход дискретного интегратора поправка на программу ![]() .
.
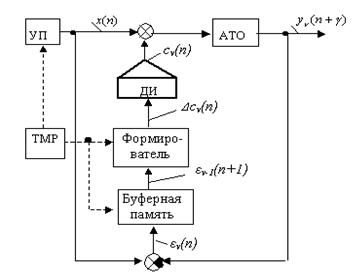
Рис. 1 Общая структурная схема адаптивной системы
Корректировка программ в общем случае осуществляется по формуле
![]() ,
, ![]() , ν=1,2,…, (1)
, ν=1,2,…, (1)
где ![]() – корректирующий сигнал,
– корректирующий сигнал, ![]() – коэффициент усиления в контуре адаптивной корректировки,
– коэффициент усиления в контуре адаптивной корректировки, ![]() – ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
– ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
Ошибки изготовления деталей состоят из регулярной и случайной составляющих. Последняя является центрированной аддитивной. Источником ее могут выступать как процесс обработки деталей сложной формы, так и ошибки автоматического измерения размеров последних. Если статистические характеристики регулярной составляющей возмущающего воздействия и случайной помехи стационарны, целью адаптации является формирование корректирующего сигнала, обеспечивающего сведение к нулю регулярной составляющей ошибки. Для этого требуется сходимость процесса (1).
В данной работе рассматривается задача обеспечения сходимости процесса (1) в предположении, что случайные возмущающие воздействия отсутствуют. На обеспечение сходимости в области случайных возмущений требуется уменьшение от цикла к циклу коэффициента усиления ![]() в контуре адаптации, на что имеются известные технические решения.
в контуре адаптации, на что имеются известные технические решения.
Как было показано Андрейчиковым Б.И. [5], при реализации контура адаптации на аналоговых средствах автоматики и вычислительной техники процесс адаптации сходится на первых циклах воспроизведения программ и неизбежно расходится в последующих. Позднее было установлено, что сходимость в аналоговых системах может быть установлена при использовании в контуре адаптации обратной модели (ОМ) АТО. Но, как известно, идеальная обратная модель реального динамического объекта физически неосуществима. Поэтому проблема обеспечения сходимости процесса адаптации в аналоговых системах не нашла законченного решения.
В системах с квантованным по времени представлением информации имеются технические решения, но и они обладают существенными недостатками. В работе [6] предложена адаптивная система, в которой в качестве формирователя корректирующего сигнала используется безынерционное динамическое звено. В этом техническом решении даже при оптимизации коэффициента усиления для завершения процесса адаптации требуется N циклов корректировки программы, где N – количество кадров в программе, что недопустимо. Кроме того, после обеспечения сходимости остаются ошибки в промежутках дискретного времени.
В работе [7] показано, что в системе по рис.1 можно обеспечить полную корректировку программы уже после одного цикла ее воспроизведения. Для этого необходимо осуществить ОМ АТО на средствах дискретной вычислительной техники и обеспечить ввод корректирующего сигнала с упреждением на один такт дискретного времени. Указанная ОМ должна удовлетворять следующему требованию: переходная характеристика комплекса из последовательно соединенных ОМ и АТО в дискретном времени имеет вид:
![]() (2)
(2)
где n – дискретность времени.
Однако технического решения дискретной ОМ, удовлетворяющей условию (2), в то время не было найдено. В последние годы на базе возможностей компьютерных технологий было найдено такое решение ОМ. Оно защищено авторским свидетельством [8], а теоретическое обоснование его приведено в [9].
Недостатком ОМ [8,9] является то обстоятельство, что она выполнена в виде замкнутой импульсной системы. Как показано в [10], такие системы обладают колебательностью в промежутках дискретного времени и требуется применение специальных технических решений для их устранения. Поэтому применение ОМ [9] в адаптивной системе по рис.1 приводит к колебательности АТО в промежутках дискретного времени без нарушения условия сходимости (2). На рис.2 показаны временные характеристики ОМ [9] и АТО при работе их в адаптивной системе.
В работе [11] предложено техническое решение по устранению колебательности замкнутых импульсных систем в промежутках дискретного времени. Оно заключается в том, что входной или выходной сигнал системы пропускается по двум параллельным каналам с различными коэффициентами передачи. В одном из этих каналов помещен элемент задержки на один такт дискретного времени. Это техническое решение применимо к ОМ [9], но порождает новую проблему: условие сходимости за один цикл (2) нарушается.
Целью данной работы является разработка такой системы адаптивной корректировки управляющих программ, в которой одновременно обеспечиваются скорость сходимости за один цикл и устранение колебательности в промежутках дискретного времени. Базой для достижения этой цели является использование результатов выполненных ранее работ.
3. Исходные данные и постановка задачи. Предполагается, что АТО непрерывный, линейный и стационарный. В качестве его исходного математического описания используется переходная характеристика (ПХ), называемая также кривой переходного процесса. Последняя может быть получена как из передаточной функции АТО с использованием обратного преобразования Лапласа, так и экспериментально.
Контур адаптации в системе функционирует в дискретном времени. Для решения задач в дискретном времени используется импульсная переходная функция (ИПФ) АТО, которая является реакцией последнего на входное воздействие в виде кратковременного импульса единичной площади. ИПФ может быть получена из ПХ по формуле:
![]() ,
,![]() , (3)
, (3)
где t – непрерывное время,
h(t) – ПХ АТО,
T – дискретность (шаг квантования) времени,
n – дискретное время (![]() , где
, где ![]() – моменты непрерывного времени, кратные Т),
– моменты непрерывного времени, кратные Т),
![]() – дробная часть дискретного времени,
– дробная часть дискретного времени,
![]() – время затухания ИПФ АТО ((
– время затухания ИПФ АТО ((![]() ).
).
На вход АТО, который является аналоговым, поступают в дискретном времени управляющая программа и выходной сигнал дискретного интегратора. Для определения выходного сигнала АТО по входному может быть использована известная [12] формула свертки:
![]() ,
,![]() , (4)
, (4)
где с(n-m) – входной сигнал,
![]() – выходной сигнал,
– выходной сигнал,
m – переменная суммирования.
Измерение ошибок управления производится в дискретные моменты времени без временного смещения, т.е. когда для выходного сигнала АТО справедливо выражение:
![]() .
.
При выполнении данной работы используется известная из [9] ОМ АТО. Она описывается математической зависимостью:
 ,
, ![]() , (5)
, (5)
где c(n) и x(n) – соответственно выходной и входной сигналы ОМ,
τ – конструктивный временной сдвиг, обеспечивающий работоспособность и устойчивость ОМ,
![]() – первое из используемых значений ИПФ АТО.
– первое из используемых значений ИПФ АТО.
При использовании ОМ в адаптивной системе наилучшим конструктивным временным сдвигом является ![]() . Тогда математическая зависимость (5) получает вид:
. Тогда математическая зависимость (5) получает вид:
 . (6)
. (6)
ОМ, описываемую выражением (6), дальше будем называть исходной обратной моделью и обозначать символом ИОМ.
Если ИОМ (6) использовать в качестве формирователя корректирующего сигнала в адаптивной системе по рис. 1, то в последней выполняется условие (2), процесс адаптации заканчивается за один цикл, но в промежутках дискретного времени неизбежно возникают колебания. Частота колебаний равна двум тактам дискретного времени. Сами колебания приближенно имеет вид затухающей синусоиды. Это объясняется следующим обстоятельством. Выходной сигнал формирователя поправки или дискретного интегратора имеет вид прямоугольных импульсов, т.е. может рассматриваться как сумма нечетных гармоник. Первая гармоника является наибольшей по амплитуде и наименьшей по частоте. АТО выполняет роль фильтра, пропускающего первую гармонику и подавляющего остальные до пренебрежимо малой величины
Для пояснения природы появления колебаний на рис.2 изображены переходные характеристики ИОМ ![]()
![]() и комплекса «ИОМ-АТО»
и комплекса «ИОМ-АТО» ![]() при работе в адаптивной системе по рис.1.
при работе в адаптивной системе по рис.1.
Общей задачей данной работы является разработка методики создания адаптивной системы со скоростью сходимости в один цикл и отсутствием колебательности в промежутках дискретного времени. Она разделяется на две подзадачи.
Во-первых. По характеристикам ИОМ и параметрам переходной характеристики комплекса «ИОМ-АТО» создается скорректированная ОМ (СОМ), обеспечивающая устранение колебательности переходной характеристики комплекса «СОМ-АТО». Устранение колебательности осуществляетя по изложенной в [11] методике, недостатком которой является потеря комплексом условия сходимости (2).
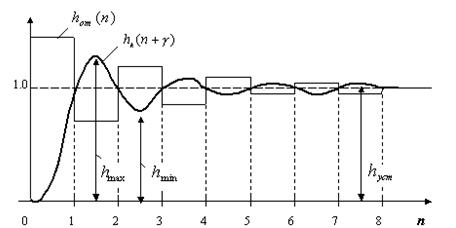
Рис. 2 Переходные характеристики ИОМ и комплекса «ИОМ-АТО»
Во-вторых. Для обеспечения выполнения условия сходимости (2) в точку измерения ошибки адаптивной системы по рис.1 вводится элемент квантования по времени, период которого в два раза больше периода работы ИОМ. В этом случае условие сходимости (2) преобразуется к виду:
![]() (7)
(7)
где ![]() – ПХ комплекса “СОМ-АТО”,
– ПХ комплекса “СОМ-АТО”,
![]() – удвоенная дискретность времени (
– удвоенная дискретность времени (![]() где
где ![]() ).
).
Указанные подзадачи решены в данной работе.
4. Изложение результатов исследования. СОМ создается на базе ИОМ, описываемой выражением (6) , с устранением колебательности по методике [11].
Структурная схема СОМ приведена на рис.3
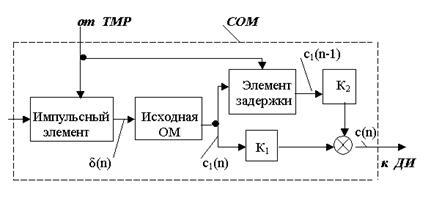
Рис. 3 Структурная схема скорректированной ОМ (СОМ).
Для устранения колебательности в промежутках дискретного времени введены элемент задержки на один такт дискретного времени и два безынерционных звена с коэффициентами передачи К1 и К2. Выходные сигналы дополнительных звеньев суммируются и подаются на вход ДИ. Сигнал на вход ИОМ поступает через импульсный элемент. Для обеспечения работы импульсного элемента и элемента задержки на них подаются тактовые импульсы с таймера ТМР с периодом Т.
Важной операцией при создании СОМ является определение численных значений коэффициентов передачи введенных звеньев К1 и К2 . Способ определения этих значений, изложенный в работе [11], является трудоемким, т.к. требует аналитических преобразований.
Для упрощения этой операции предлагается численный метод ее выполнения. Он состоит в следующем. На основании математического описания АТО в виде ИПФ (3) осуществляется его ИОМ по формуле (6). Затем создается инструментальная схема в виде комплекса “ИОМ-АТО”. В качестве АТО может выступать его модель, реализующая формулу свертки [4]. Затем строится ПХ комплекса ![]() . Ее типовой вид показан на рис.2. Основными параметрами ПХ являются максимальное значение
. Ее типовой вид показан на рис.2. Основными параметрами ПХ являются максимальное значение ![]() , минимальное
, минимальное ![]() и установившееся
и установившееся ![]() . Указанные параметры обладают свойствами:
. Указанные параметры обладают свойствами: ![]() >1,
>1, ![]() <1,
<1, ![]() =1. Кроме того, численные значения ПХ в дискретные моменты времени, начиная с первого, равны единице, т.е.
=1. Кроме того, численные значения ПХ в дискретные моменты времени, начиная с первого, равны единице, т.е.
![]() . (8)
. (8)
Изображенная на рис.2 ПХ имела бы место и применительно к комплексу “СОМ-АТО” в том случае, когда коэффициент передачи звена в прямом канале К1=1, а в канале с временной задержкой К2 =0. В обратном случае, т.е. при К1=0, а К2=1, ПХ имеет такой же вид, но со сдвигом вправо на один такт дискретного времени.
На рис.4 показана ПХ комплекса “СОМ-АТО” тогда, когда действуют одновременно прямой канал и канал с задержкой. Цифрами на рисунке обозначены: 1- общая ПХ, 2 - составная часть ПХ, порождаемая сигналом канала с задержкой, 3 - составная часть, порождаемая прямым каналом. В этом случае полезные составляющие процесса складываются, а колебательные – взаимно подавляются.
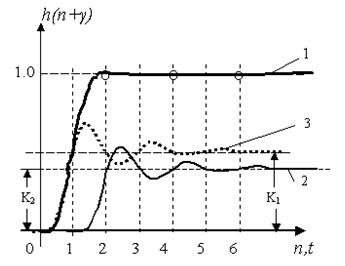
Рис. 4 К пояснению устранения колебаний в адаптивной системе.
Если сумма этих коэффициентов
К1+К2 =1, (9)
то, учитывая (8), числовые значения ПХ в дискретные моменты времени, начиная со второго, также равны единице, т.е.
![]() (10)
(10)
Для устранения колебания в промежутке между вторым и третьим моментами дискретного времени сумма максимального значения кривой 2 и минимального значения кривой 3 согласно рис.4 должна быть равна единице. Это имеет место тогда, когда коэффициенты передачи звеньев К1 и К2 удовлетворяют уравнению
![]() (11)
(11)
Решая систему из уравнений (9) и (11), получим те значения коэффициентов, при которых устраняется колебательность комплекса “СОМ-АТО” с одновременным соблюдением условия (10) :
![]() ,
, ![]()
![]() . (12)
. (12)
Из формул (12) следует, что величины коэффициентов могут изменяться в определенных пределах в зависимости от колебательности исходного комплекса “ИОМ-АТО”. Если колебательность отсутствует, т.е. ![]() , то потребность в звене с временной задержкой отпадает, а коэффициенты получают значения К1 =1, К2 = 0. Если же колебания имеются и не угасают, т.е.
, то потребность в звене с временной задержкой отпадает, а коэффициенты получают значения К1 =1, К2 = 0. Если же колебания имеются и не угасают, т.е. ![]() , то К1 = К2 = 0.5.
, то К1 = К2 = 0.5.
А теперь рассмотрим подзадачу обеспечения сходимости процесса адаптации за один цикл, когда необходимо выполнение условия (2) для комплекса “СОМ-АТО”. У нас же справедливо соотношение (10), при котором в общем случае ![]() .
.
Предлагается следующее решение задачи. Как видно из рис.4, все значения ПХ комплекса “СОМ-АТО” для четных моментов времени, как это отмечено кружочками, равны единице. Поэтому, для обеспечения выполнения условия (2), ошибку адаптивной системы следует регистрировать только в четные моменты дискретного времени n. Это равносильно введению в адаптивный контур нового дискретного времени m, шаг квантования которого в два раза больше дискретности работы ИОМ:
![]() , (13)
, (13)
где Т – дискретность ИОМ, ![]() – моменты непрерывного времени, кратные
– моменты непрерывного времени, кратные ![]() .
.
При введении нового дискретного времени m в соответствии с (13) условие (2) обеспечения сходимости процесса адаптации за один цикл, уже применительно к комплексу “СОМ-АТО”, получает вид:
![]()
Таким образом, обе поставленные в данной работе подзадачи решены – колебательность адаптивной системы в промежутках дискретного времени устранена при сохранении скорости сходимости процесса адаптации за один цикл.
Для иллюстрации полученных результатов на рис.5 приведена структурная схема улучшенной адаптивной системы. Символом БП на схеме обозначен блок памяти.
С целью устранения ошибок системы в промежутках дискретного времени в адаптивный контур введена СОМ, структурная схема которой изображена на рис.3. Для обеспечения же в системе скорости сходимости в один цикл в таймере ТМР предусмотрены два выхода. С первого из них снимаются и подаются на СОМ опорные сигналы с периодом следования Т. Со второго выхода на синхровход БП подаются импульсы с удвоенным периодом следования Т2 =2Т. С выхода БП снимаются ошибки предыдущего цикла воспроизведения с периодом Т2 и упреждающим временным сдвигом на один такт.
5. Методика конструирования адаптивной системы.
5.1. При конструировании адаптивной системы в качестве исходного математического описания АТО выступает его переходная характеристика (ПХ), которая может быть получена из передаточной функции или экспериментально.
5.2. Первым конструктивным параметром адаптивного контура является частота регистрации измеряемых ошибок. В общем случае эту частоту можно выбирать в широких пределах, но конструктивно ее наиболее удобно принимать равной половине частоты квантования управляющей программы. В этом случае рабочая частота подлежащей созданию ИОМ будет совпадать с частотой квантования управляющей программы.
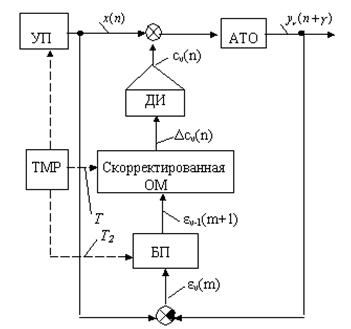
Рис. 5 Структурная схема адаптивной системы без колебательности
5.3. Формируется числовой массив ИПФ АТО по формуле (3).
Создается ИОМ по формуле (6).
5.5. Строится инструментальная модель из последовательно соединенных ИОМ и АТО.
5.6. Строится кривая ПХ инструментального комплекса «ИОМ—АТО», аналогичная изображенной на рис.2. Регистрируются максимальное ![]() и минимальное
и минимальное ![]() значения ПХ во втором и третьем тактах дискретного времени.
значения ПХ во втором и третьем тактах дискретного времени.
5.7. Вычисляются коэффициенты передачи дополнительных звеньев СОМ по формулам (12) и строится сама СОМ по рис.3.
5.8. Осуществляется адаптивная система по рис.5. Для проверки ее показателей качества строится ПХ последовательно соединенных СОМ и АТО в дискретном времени цепи регистрации ошибки. Полученная ПХ должна соответствовать изображенной на рис.4 кривой 1, но с вдвое большей дискретностью времени.
6. Экспериментальная часть. Изложенное подтверждено электронным моделированием. Отдельные технические решения проверялись с использованием пакета прикладных программ Mathcad. Для моделирования всей адаптивной системы была разработана прикладная компьютерная программа.
7. Выводы по результатам исследований и перспективы.
7.1. В предложенной структурной схеме адаптивной системы решены комплексно две задачи для случая отсутствия помех. Во-первых, обеспечивается скорость сходимости процесса адаптации за один цикл. Во-вторых, в системе устраняются колебания в промежутках дискретного времени.
7.2. Для обеспечения сходимости процесса адаптации при наличии случайных помех в системе по рис.5 может быть непосредственно использован известный [13,14] способ оптимизации коэффициента усиления по результатам статистического анализа зарегистрированных ошибок управления. Такая возможность обеспечивается применением в контуре адаптации системы обратной модели АТО.
7.3. Рассматриваемая адаптивная система не является сложной при практической реализации. Все элементы контура адаптации могут быть выполнены программно. Для уменьшения объема вычислительных операций и используемой памяти при работе системы некоторые вычисления могут быть выполнены еще на стадии проектирования. В частности, скорректированная ОМ может быть преобразована в простое динамическое звено, описываемое числовым массивом ИПФ. В качестве инструмента при выполнении работы по упрощению структурной схемы системы может быть использована ее структурная схема по рис.5.
Полученные результаты могут быть использованы при разработке систем автоматизированного проектирования и отладки программ автоматического управлении дискретно-непрерывными технологическими процессами.
The system of adaptive management of cyclically repeating technological processes with using return model of the automated object is considered. The technical decision on elimination of system oscillations is offered at preservation of high speed of convergence of adaptation process.
1. Ивахненко А.Г. Техническая кибернетика. К: Гостехиздат УССР, 1959. – 423 с.
2. Перельман И.И. Регулирование по принципу самоустанавливающейся программы // Автоматика и телемеханика. – 1958, №9. – С. 813-823.
3. Кобринский А.Е., Колискор А.Ш., Левковский Е.И., Попов В.Е., Сергеев В.И. Самонастраивающаяся система программного управления станками // Вестник АН СССР. – 1965, №9. – С. 52-57.
4. Цыпкин Я.З. Адаптация и обучение в автоматических системах. – М.: Наука, 1968. – 400 с.
5. Андрейчиков Б.И. Динамическая точность систем программного управления станками. – М.: Машиностроение, 1964. – С. 242-267.
6. Перельман И.И. Самонастраивающаяся программа как средство для получения заданной реакции на выходе линейного динамического объекта регулирования // Автоматика и телемеханика. – 1958. – №4. – С.312-320.
7. Клименко А.К. О сходимости процессов адаптации в цифровых системах программного управления станками // Сб. «Адаптивные системы управления металлорежущими станками» / Под ред. А.Е. Кобринского, Сер. С-1. — М.: НИИМАШ, 1971.— С.58-67
8. Клименко А.К., Клименко В.Г. Корректирующее устройство. – Авт. свид. СССР №1406563.– Бюллетень изобретений, №24, 1988.
9. Клименко А.К. Обратная модель для решения задач управления и контроля качества / Методы менеджмента качества // Надежность и контроль качества. – 1999 – №8. – С. 32-39.
10. Franklin G.F., Emami – Naeini A. Design of ripple–free multivariable robust servomechanisms. IEEE Transactions on Automatic Control. – Vol. PC-31. – 1966. P. 661-664.
11. Клименко А.К. Способ повышения качества импульсных следящих систем // Надежность и контроль качества. – 1998. – №3. – С. 18-23.
12. Цыпкин Я.З.Теория линейных импульсных систем. – М.: Физматгиз, 1963. – С.269.
13. Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью // Автоматика. Автоматизация. Электротехнические комплексы и системы. – 2006, №2. – С.125-131.
14. Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью // Автоматика. Автоматизация. Электротехнические комплексы и системы. – 2007, №2. – С.140-146.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.