УДК.621.311
МЕТОДЫ НАСТРОЙКИ
НЕЧЕТКОГО АДАПТИВНОГО ПИД-РЕГУЛЯТОРА
Михайленко В.С., Ложечников В.Ф.
При управлении сложными объектами, функционирующими в условиях нестационарности, широкое применение нашли адаптивные регуляторы, реализующие типовые ПИ- или ПИД-законы регулирования. Адаптивные контроллеры зарубежных и отечественных производителей: Ремиконт, Овен, Сименс, Микрол и т.д., как правило, реализуют метод Зиглера-Николса [1]. Следует отметить, что данный метод предполагает вывод объекта в область автоколебаний, за счет перехода на П-закон и грубого варьирования коэффициента усиления Кр. Однако, значительный ряд технологических процессов по условиям эксплуатации не допускают автоколебательного режима. Таким образом, задача нахождения оптимального метода адаптации остается открытой.
Вместе с тем, в последнее время широкую популярность находят нечеткие модели и алгоритмы управления [2,3,5]. Известно, что нечеткое управление основано на использовании не столько аналитических или теоретических моделей, сколько на практическом применении знаний квалифицированных специалистов, представленных в форме лингвистических баз правил. Нечеткое управление эффективно в случаях недетерминированности параметров объектов, когда существует определенный опыт экспертов по управлению и настройке автоматизированной системы регулирования (АСР). Теория нечеткой логики позволяет использовать знания специалистов – наладчиков с целью улучшения процессов управления и оказания помощи (супервизорный режим) по настройке типовых регуляторов. Исходя из вышесказанного, задача создания метода адаптации ПИД-регулятора, реализующего опыт наладчиков, становится актуальной.
Целью статьи является разработка нечеткой экспертной системы, определяющей оптимальные настройки ПИД-регулятора, для его адаптации к объекту управления, и ее апробация в пакете Matlab (Simulink). Разобьем научную задачу на ряд этапов. На первом этапе определим структуру адаптивной АСР (рис.1):
Рис. 1 Структура адаптивного нечеткого управления
где Е – ошибка; Z – задание; Y – выходное значение; N – возмущение; Кр, Ти, Кd – настройки ПИД-регулятора.
На втором этапе в программе Matlab (FLT) производится создание системы нечеткого вывода или адаптера (рис.2)
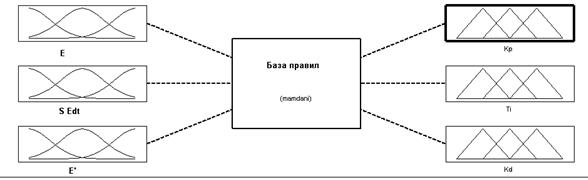
Рис. 2 Графический интерфейс редактора FIS
На третьем этапе проводится фаззификация входных и выходных лингвистических переменных (ЛП). Фаззификация входных значений (ошибки регулирования (Е), ее интеграла и производной) производится согласно рекомендациям [4]. Графики функций принадлежности входных ЛП представлены на рис. 3 - 5.
Функцию принадлежности Z–вида, представляющую терм – «отрицательная ошибка “otr”» можно представить в виде: f z (x, -0.6, -0.1) = [ 1, x < - 0.6; -0.1 – x / 0.5; 0, -0.1 < x].
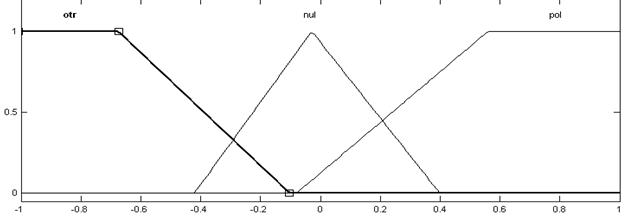
Рис. 3 Функции принадлежности ЛП «ошибка»:
оtr - отрицательная, nul – нулевая, pol – положительная
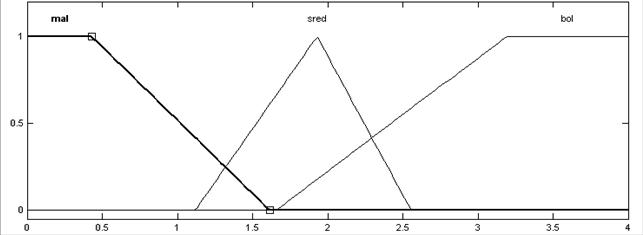
Рис. 4 Функции принадлежности ЛП «интеграл ошибки»:
mal – маленький, sred – среднний, bol – большой
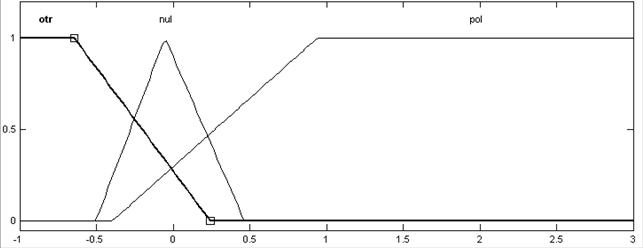
Рис. 5 Функции принадлежности ЛП «производная ошибки»
Этап фаззификации выходных ЛП «настройки ПИД-регулятора» проведен с учетом рекомендаций [4,5] и представлен на рис. 6.

Рис. 6 Функции принадлежности ЛП «коэффициент усиления Кр»:
mal – маленький, sred – среднний, bol – большой
Функции принадлежности ЛП «Ти» и «Кd» также отображаются Z и S – образными графическими видами. Следует отметить, что Ти лежит на универсуме [0-5], а Кd = [0-15].
Четвертый этап заключается в создании базы правил вида «ЕСЛИ …ТО». Исходя из рекомендаций из специализированной литературы [5], проведенных экспериментов в редакторе FLT, а также опыта экспертов-наладчиков систем автоматизации, предлагаются следующие правила: ЕСЛИ «ошибка есть отрицательная» И «интеграл ошибки есть маленький» И «производная ошибки есть отрицательная» ТО «Кр есть большой», «Ти есть большой», «Кd есть большой» и т.д. (рис. 7)
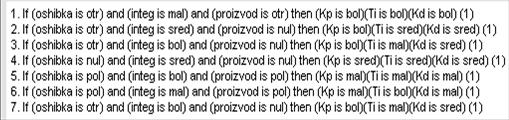
Рис.7 Фрагмент базы правил
На следующем этапе проводится компьютерное апробирование нечеткой модели. В первоначальном эксперименте использовалась АСР с ПИД-регулятором, функционирующем по каналу задания Z=1, при влиянии на объект канала возмущения при этом: Wоб(S) = 2.5/(5S2+3S+1); WN(S) = 0.5/(5S+1). Настройка регулятора проводилась методом Зиглера-Николса. Значения настроек равны Кр=1.3; Ти=0.15; Кd=10.3, а переходный процесс удовлетворяет основным показателям качества. Предположим, что в связи с неопределенностью условий эксплуатации объекта, произошло изменение значений ключевых параметров такового. Например, Wоб(S) = 2.5/(15S 2 +2S+1); WN(S) = =3.5/(15S+1). При известных настройках регулятора, переходный процесс с новыми значениями передаточных функций обладает перерегулированием G=80%, что недопустимо (рис.8).
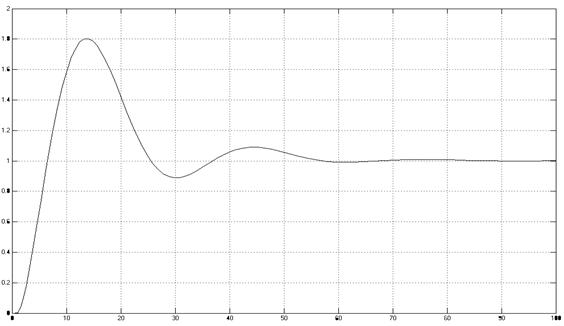
Рис. 8 Переходный процесс по каналу задания
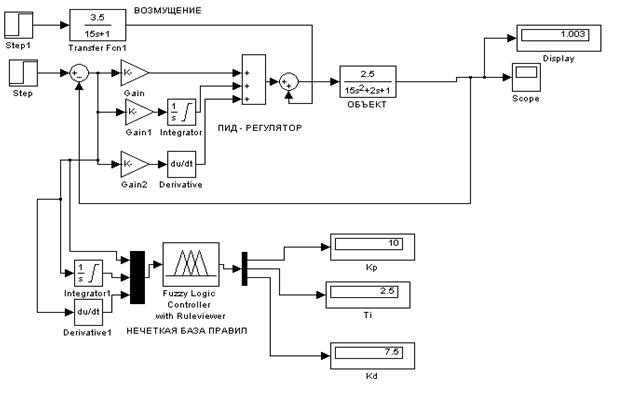
Рис. 9 Экспериментальная схема, выполненная в программе (Simulink)
Таким образом, необходима временная остановка сложного технологического процесса и перенастройка значений настроек ПИД-регулятора.
Произведем проверку нечеткого адаптера при известных условиях (рис.9). Нечеткая система выдала следующие результаты: Кр=10; Ти=2.5; Кd=7.5, а переходный процесс регулирования при данных настройках для ПИД-регулятора показан на рис.10.
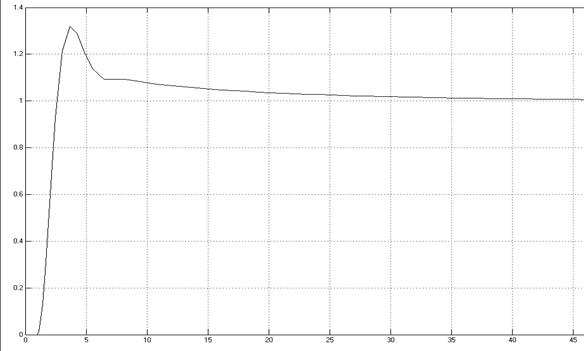
Рис. 10 Переходный процесс, полученный при адаптивных настройках
Как видно из рис.10, перерегулирование G не превышает 30%, что допустимо, а время регулирования Tр уменьшилось по сравнению с предыдущем на 30 секунд. Результат работы нечеткого адаптера в программе Matlab (FTL) показан на рис.11.
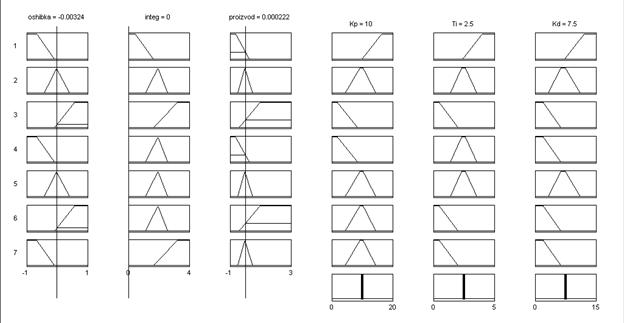
Рис.11 Результат работы нечеткого адаптера
Таким образом, использование нечетких адаптивных ПИД-регуляторов позволит эффективно управлять технологическими процессами без их остановов, а дальнейшее введение нейрокомпьютера может привести к самообучающейся адаптации по определению оптимальных настроек без корректировки базы правил.
ЛИТЕРАТУРА
1. Дьяконов В.П. Simulink 5/6/7 Самоучитель. – М.:ДМК, 2008 – 781с.
2. Леоненков А. Ю. Нечеткое моделирование в среде Matlab и fuzzyTech. - С. - Птб.: БХВ, 2003. - 720 с.
3. Мелихов А.Н. и др. Ситуационные советующие системы с нечеткой логикой. – М.: Наука, 1990. – 272 с.
4. Ротач В.Я., Клюев А.С. Автоматизация настройки систем управления. М.: Энергоиздат, 1984 – 272 с.
5. Алиев Р.А., Церковный А.Э., Мамедова Г.А. Управление производством при нечеткой исходной информации. М.: Энергоиздат. 1991. – 234 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Щокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емуляторомМихайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.