УДК 629.5.051.53: 004.89
ПРИНЦИПЫ ПОСТРОЕНИЯ ИНТЕЛЛЕКТУАЛЬНОГО АВТОРУЛЕВОГО
Введение. Одной из актуальных государственных задач является возрождение отечественного кораблестроения, которое может быть достигнуто путем разработки новых, конкурентоспособных кораблей, внедрением передовых принципов построения систем в эту отрасль [1]. К числу таких задач относится внедрение в практику кораблевождения интеллектуального авторулевого. Под интеллектуальным будем понимать авторулевой способный планировать действия и вырабатывать решения для обеспечения эффективного управления кораблем. Целесообразность разработки авторулевого такого типа доказывается результатами анализа причин аварий судов, опытом обеспечения безопасного движения судов при возрастающей их быстроходности.
Анализ претензий по причинам аварийности судов на морском флоте, проводимый английским клубом защиты и возмещения ущерба, показал, что наибольшее их количество (примерно 62 %) связано с ошибками обслуживающего персонала [2]. Число ошибок экипажа непосредственно определяется количеством возлагаемых на него задач. Уменьшения числа задач, выполняемых обслуживаемым персоналом, при сохранении эффективности управления кораблем можно достичь только увеличением средств автоматизации в управляющей системе корабля.
Достижение таких преимуществ современных кораблей, как высокая маневренность, быстроходность связано с необходимостью увеличения количества бортового оборудования, работающего в условиях значительных перегрузок. Второе место среди причин аварийности (около 23%) занимают технические, конструкционные и технологические неполадки, поэтому естественными требованиями к управляющему устройству является повышение его надежности, сокращение времени на поиск неисправности, а также устранение неполадок [2].
Не менее важной в последнее время становится задача обеспечения безопасности движения и маневрирования судов в море в связи с увеличением их количества, тоннажа, скорости движения, ростом стоимости судов и перевозимых ими грузов. Эта задача может быть решена повышением точности курсового управления судном.
Эксплуатация бортового оборудования происходит в условиях значительного отбора мощности от энергетической установки. В таких условиях возникает еще одна задача эффективной эксплуатации судна – экономный расход топлива. Эта задача также должна быть возложена на управляющее устройство.
С этими и другими задачами сталкивается конструктор при построении авторулевого, от которого в определенной мере зависит удовлетворение противоречивых требований к техническим показателям корабля. В настоящее время авторулевой представляет собой достаточно сложное устройство, интегрирующее различные навигационные приборы, управляющую и исполнительную части.
Решением задачи создания эффективного авторулевого занимаются специалисты многих стран мира. Наибольшие успехи в этой отрасли достигнуты в таких странах, как Россия, США, Швеция, Германия, Канада [3-8]. Характерной чертой авторулевых последних разработок является модульно-магистральный принцип построения и способность его адаптации к условиям эксплуатации. Современный взгляд на решение описываемого круга задач подробно отражается в работе [9].
Проведенный анализ состояния разработок и публикаций на эту тему [3-11] свидетельствует о том, что в настоящее время наметилась тенденция к повышению уровня ²интеллектуальности² авторулевого. Известные публикации в области интеллектуальных систем ориентированы на задачи управления космическими летательными аппаратами, диагностики [10], моделирования процессов в чрезвычайных ситуациях [11]. Представление же об интеллектуальности управляющей системы авторулевого в концептуальном плане отсутствует. При этом, в частности, не вполне ясным является вопрос, какими характеристиками должен обладать авторулевой, чтобы быть отнесенным к интеллектуальным устройствам управления. Обсуждению этого и близких к этому вопросов посвящена эта статья.
Предпосылки создания интеллектуальных авторулевых. Очевидно, что появление авторулевых устройств обязано, прежде всего, развитию теории автоматического управления. Поскольку по сути дела авторулевой – это автоматический прибор, устраняющий курсовую ошибку следования судна с помощью рулевого привода, обеспечивая тем самым удержание судна на заданном курсе без участия рулевого матроса.
Современные авторулевые используют широкий арсенал средств автоматического управления для реализации различных задач управления курсом судна. Авторулевой может быть реализован традиционными принципами построения как неследящий или следящий или же по адаптивным принципам управления.
При неследящем управлении руль перекладывается на правый или левый борт для выполнения криволинейного движения судна, в нейтральном положении руля судно выполняет прямолинейное движение. Для этого режима характерны максимальные и частые перекладки руля, что приводит к преждевременному износу рулевого привода, и, как следствие, к низкой точности управления. Данный режим может быть применен на циркуляции, при отработки маневра судна по курсу.
Следящий режим используется в задачах управления траекторией судна, удержания судна на предварительно установившемся курсе. В этом режиме управления руль перекладывается до тех пор, пока курс судна не совпадет с заданным. Режиму свойственна более высокая точность управления судном по курсу, меньшая частота перекладки руля, и, следовательно, более высокая надежность эксплуатации авторулевого. В качестве недостатка следует отметить необходимость настройки авторулевого под условия хода.
В последнее время в авторулевых широко используются технологии адаптивного управления [9], обеспечивающие оптимальный режим движения судна при изменении условий его движения. Адаптивные авторулевые являются широко распространенным коммерческим продуктом. Общая архитектура таких систем известна и включает пульт управления с органами настройки, контроля и управления, управляющее устройство с устройством адаптации и исполнительный механизм с рулем. Управляющее устройство представляет собой некоторый вычислитель, формирующий сигнал управления, определяющийся координатами движения судна. Как отмечается в [9] и подтверждается опытом и анализом эксплуатации адаптивных авторулевых, настройка коэффициентов авторулевого или частичное изменение его структуры с помощью корректирующих устройств возможны только на отдельных режимах его работы и не являются в полной мере адекватными фактическим изменениям характеристик судна и внешних воздействий.
Наряду с применением достижений теории автоматического управления в авторулевых широко применяется и современная элементная база с привлечением цифровых вычислительных систем. Цифровые системы управления заслужено находят применение в авторулевых, что позволяет сочетать возможности новой элементной базы и эффективные алгоритмы управления. Применение цифровых аппаратных средств, к которым следует относить спецвычислители, процессоры, позволяет повысить качественные показатели управления. Это, прежде всего, точность удержания судна на курсе в различных условиях плавания, уменьшение величины и числа перекладок руля, что дает заметное сокращение пути; кроме того, позволяет обеспечить более высокую надежность авторулевого, а также облегчить работу обслуживающего персонала. Таким образом, следующим немаловажным фактором, привлекающим конструкторов к разработке более совершенных авторулевых, является развитие средств аппаратной поддержки.
Особенностью применения современных систем управления является использование в них результатов теории обучения и систем поддержки принятия решений [10-12].
Таким образом, ставится задача построения авторулевого, который обеспечивал бы меньшие риски при эксплуатации корабля путем обеспечения такого управления, которое соответствует наилучшим условиям хода.
В статье рассматривается одно из направлений создания такого авторулевого, ориентированное на повышение его интеллектуальности. Принципы построения его существенно опираются на составляющие, рассмотренные здесь, а сочетание представлено на рис. 1. В задаче создания интеллектуального авторулевого эти составляющие равноценны, поэтому и размещены в один ряд. Использование какой-либо одной составляющей, по нашему мнению, не приводит к созданию интеллектуального авторулевого, что и показывается в данной статье.

Рис.1 Составляющие интеллектуального авторулевого
Вполне вероятно, что архитектура интеллектуального авторулевого может существенно измениться, в частности – наполниться новыми элементами, характерными для интеллектуальных систем. Как и для случая известных интеллектуальных систем, предполагается, что по качеству решения задач управления интеллектуальный авторулевой приблизится к решениям, принимаемым человеком-оператором, а по скорости принятия адекватных решений существенно превзойдет реакцию человека (особенно в непредсказуемых и непредвиденных ситуациях).
Принципы организации интеллектуальных авторулевых. Рассмотренные предпосылки позволяют сформулировать ряд основополагающих принципов, которые должны быть применены при реализации интеллектуального авторулевого.
Принцип адекватности. При построении авторулевого должны быть использованы модели, которые описывают его функционирование адекватно реальным условиям эксплуатации. Под этим следует понимать как соответствие исходных данных реальным условиям эксплуатации, так и полное соответствие структуры управляющего устройства знанию об управляемом процессе. Соответствие предполагает использование априорной информации о допустимых границах изменения исходных данных в условиях конкретных задач. Под исходными данными следует понимать данные о входных воздействиях и возмущениях, параметры управляющего устройства. Управляемый процесс должен быть наиболее полно представлен допустимой математической моделью, управляющее устройство реализует поставленную цель управления.
Принцип идеального результата. Авторулевой должен добиваться наилучшего результата в любых условиях функционирования, т.е. быть оптимальным. Этот результат определяется выдвинутым критерием в задаче управления. Под критерием управления следует понимать количественные характеристики пути, минимально возможных ошибок, минимальный расход топлива на отработку задания и т.п. Основная роль в применении этого принципа управления отводится управляющему устройству. В современных авторулевых задача оптимизации решается с помощью компьютеров или же специализированных ЭВМ в контуре управления. Измерительная система управляющего устройства должна удовлетворять выдвинутым требованиям к авторулевому. Идеальный результат должен обеспечиваться как в условиях преднамеренных, так и непреднамеренных помех.
Принцип иерархичности. Иерархичность предполагает совершенствование функционирования по мере накопления необходимых знаний об условиях хода и объекта управления. При иерархическом (многоуровневом) построении авторулевого результаты, полученные на более низком уровне системы, позволяется использовать верхними уровнями для совершенствования функционирования нижнего уровня без перестройки конструкции авторулевого. Кроме того, иерархичность позволяет ограничиться таким уровнем управления, который определяется характером решаемых задач. Очевидно, что наличие иерархической структуры предполагает и учет фундаментального принципа, сформулированного в свое время Саридисом [14] для интеллектуальных машин. Этот принцип гласит, что по мере продвижения к высшим уровням иерархической структуры повышается интеллектуальность системы, но снижается ее точность.
Принцип универсальности. Данный принцип предполагает возможность технологического наращивания системы, применения ее на аппаратах произвольного назначения. Структура системы управления должна гибко изменяться в зависимости от поставленных задач. Авторулевой должен быть универсален не только по задачам, но и по конструкции, иметь возможность эксплуатации в любых климатических условиях и механических нагрузках.
Реализация данного принципа достигается введением модульно-магистрального построения авторулевого, использованием соответствующей элементной базы и программного обеспечения.
Принцип обучения. Реализация данного принципа в авторулевом позволит ему достичь наилучших результатов в условиях длительной эксплуатации при фиксировании данных внешней среды, параметров системы, путем многократных воздействий на систему управления ходом судна. Обучение будет эффективным при интеграции разных методов теории управления.
Интеграция методов адаптации и идентификации, рассмотренных в [13], дает представление о возможных путях их взаимодействия, которое может быть организовано не только последовательно, но и параллельно во времени. Иначе говоря, эти методы могут ²сосуществовать² одновременно. Этот процесс иллюстрируется на рис. 2. Алгоритм идентификации, как более быстрый, но и более грубый, находящийся на верхнем по отношению к алгоритму адаптации уровне иерархии, отыскивает лучшие первоначальные оценки вектора параметров сi, а алгоритм адаптации, как более точный обеспечивает более ²тонкое² движение вектора сi вблизи оптимального с* (своеобразная ²доводка²), что и будет результатом действия алгоритма обучения.
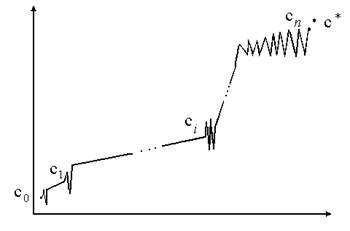
Рис.2 Принцип обучения неизвестных параметров
Несмотря на работу алгоритма адаптации, результаты высшего по уровню иерархии алгоритма идентификации позволяют ему срывать предыдущую работу алгоритма адаптации и задавать новые оценки, которые будут лучше, чем те, что были получены алгоритмом адаптации. Разумеется, что при каждом таком ²срыве² теряется определенный путь, пройденный вектором сi в правильном направлении к желаемому с*. Однако, такую потерю вполне можно допустить, поскольку алгоритм идентификации, осуществляя грубую оценку неизвестного с, все-таки позволяет достаточно быстро приблизиться к окрестности точки с*. Последнее обновление начальных условий алгоритма адаптации как раз и произойдет тогда, когда начальная оценка сi будет достаточно близкой к с*.
Принцип эргатичности. Наличие сложной управляющей бортовой системы вовсе не исключает участия в ее работе человека, которому отводятся не только функции ввода задания, контроля качества протекания процесса управления, но и возможность непосредственного участия в нем. Разумное распределение функций между человеком и машиной является важным этапом синтеза системы, при этом необходимо учитывать сильные и слабые стороны человека-оператора и технических устройств. Участие человека придаст машине большие интеллектуальные возможности в процессе управления в непредвиденных ситуациях, а также более высокий уровень адаптации ее функционирования в разных режимах.
Общая концептуальная структура адаптивного авторулевого. Сформулируем определения, необходимые для формализации основных исследуемых понятий.
Определение 1. Под интеллектуальным авторулевым будем понимать управляющую систему, организованную и функционирующую в соответствии со сформулированными выше принципами.
Здесь и далее под термином интеллектуальный будем понимать способность решать задачи, возникающие в процессе эксплуатации судна, требующие формирования решений для случая неизвестных ему априори схем решений. Отличительной чертой интеллектуального авторулевого является наличие системы синтеза закона управления по заданной цели управления и средств формирования собственно цели управления на основе информации о среде и цели функционирования системы. Построение плана решения задач осуществляется на основе знаний о методах решения задач теории автоматического управления.
Интеллектуальность авторулевого предполагает возможность совместного решения ряда вопросов, связанных с планированием решения, работой с базами данных, формированием решения, его исполнением, адаптацией исполнительной части, возможностью улучшения решения за счет обучения на серии исполнительских движений и перестройкой структуры по результатам обучения (самоорганизацией) с вопросами прогноза изменения внешней обстановки, сохранением функционирования при частичной потере управляющих свойств системы, возможностью повышения интеллектуальности и совершенствованием собственного поведения (открытость системы). В управляющих системах авторулевого предполагается использование интеграции известных современных методы управления таких, как системы управления на базе нейронных сетей, настраиваемых с помощью генетических алгоритмов, системы нечеткой логики [15] и другие. Комплексное применение всех перечисленных решений, в конечном счете, позволит устранить априорную неопределенность задачи управления кораблем. Однако следует ожидать, что не все перечисленные задачи будут одинаково полно востребованы в том или ином авторулевом. Поэтому будем различать понятия интеллектуальности в ²большом² и ²малом².
Определение 2. Под интеллектуальностью авторулевого в ²большом², будем понимать возможности авторулевого по удовлетворению всем выше перечисленным принципам, в пределах которых осуществляется выполнение задач планирования решений, формирование решений, адаптация и обучение исполнительной части, а также прогноз изменения внешней обстановки, обеспечение возможностей по повышению интеллектуальности и сохранение функционирования в условиях частичной потери управленческих свойств.
Общая схема организации построения интеллектуального авторулевого будет иметь вид многопроцессорной системы, которая представлена на рис. 3. Составными блоками схемы являются центральный процессор с пультом управления, система обучения, система адаптации, управляющее устройство рулевым приводом и руль как орган управления.
Человеком-оператором вводится задание в центральный процессор через пульт управления оператора. Структура отвечает принципу иерархии, где на нижнем уровне (I) размещен рулевой привод, на верхнем (V) – центральный процессор, который формирует план решения задачи, выдавая исходные данные на систему обучения, систему адаптации и рулевой привод. Непосредственное управление рулем осуществляется рулевым приводом. Управляющее устройство (уровень - II) представляет набор схем управления, выбор каждой из которых соответствует сложившейся ситуации управления.
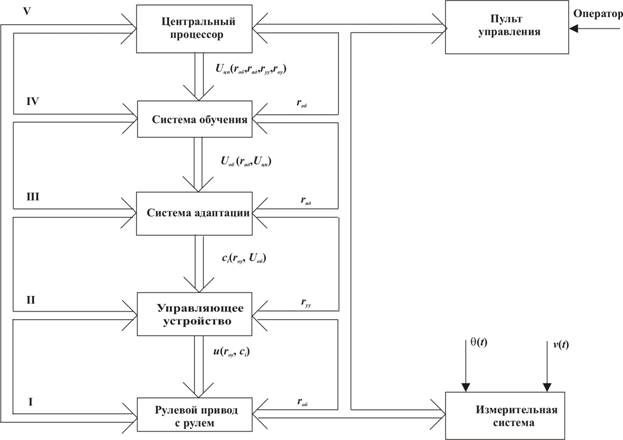
Рис. 3 Схема организации интеллектуального авторулевого
Управляющее устройство формирует сигнал управления u(rоу, сi) рулевым приводом. Для достижения заданной цели управления по информации rоу устройство адаптации (уровень - III) может изменять параметры сi управляющего устройства. Система обучения (уровень - IV) накапливает информацию об условиях эксплуатации авторулевого rоу, rад и может изменять исходные данные о границах действующих возмущений q(t) или интервалах изменения параметров сi управляющего устройства по данным измерений параметров внешней среды q(t) и внутренних шумов v(t), проводимых измерительной системой. При изменении условий эксплуатации параметры рулевого привода, а возможно и структура управляющего устройства изменяются системой адаптации. В случаях, когда предпринятые меры не приводят к эффективному решению задачи, предполагается использование системы обучения, для которой исходные данные rоу, rад, rуу для возникшей ситуации принимаются как новые. Центральный процессор составляет план выполнения задачи в виде директив или команд U(rоу, rуу, rад, roб), осуществляет контроль качества по информации, курсирующей в информационной шине, составляет отчет о качестве ее выполнения, выдает рекомендации для дальнейшего управления процессом.
Как следует из схемы организации интеллектуального авторулевого, центральным процессором производится оценка качества выполняемой задачи. Центральный процессор может вмешиваться в процесс управления для того, чтобы менять план решения задачи для формирования управления адекватно сложившейся ситуации в условиях неопределенности используемой информации. Дополнительная магистраль, показанная на рис.3 слева, имеет смысл адресной. Таким образом, центральный процессор может быть аналогом некоторой экспертной системы, в состав которой могут быть включены механизмы правдоподобного вывода на знаниях такие, как вывод по аналогии, на основе здравого смысла и т.п.
Учитывая сложность рассматриваемой задачи, можно предположить, что перечисленные задачи могут быть выполнены и не в полном объеме (в смысле определения 2), тем не менее, авторулевой будет считаться интеллектуальным.
Определение 3. Под интеллектуальностью авторулевого в ²малом², будем понимать частичное удовлетворение выше перечисленным принципам, однако его характеристики будут позволять преодолевать возникающую априорную неопределенность в ряде задач управления судном.
Разработанная структура авторулевого (рис.3) при реализации интеллектуальности в ²малом² не предполагает существенных изменений. В этом случае будет только использовано меньшее количество возможностей аппаратных средств.
Заключение. Разработка интеллектуального авторулевого в настоящее время является вполне реальной задачей. Структура интеллектуального авторулевого, представленная в статье, может быть выбрана в качестве базовой, хотя ряд алгоритмов и методов управления, используемых для решения задач управления, требует определенной проработки и уточнения. Основные усилия для решения первоочередных задач по созданию интеллектуального авторулевого следует направить на разработку алгоритмов адаптации, обучения и принятия решений.
ЛИТЕРАТУРА
1. Біла книга 2008: оборонна політика України // Міністерство оборони України. – К.: Заповіт, 2009. – 100 с.
2. Ланчуковский В.И. Риск менеджмент судовой машинной команды / В.И. Ланчуковский, А.А. Бондаренко // Автоматика-2008: доклади XV міжнарод. конф. з автоматич. управління, 23-26 вересня 2008 р. – Одеса: ОНМА. – С. 74-77.
3. NaviPilot ADII. The self-turning adaptive autopilot / [Электронный ресурс] – Режим доступа: http://www.sperrymarine.northropgrumman.com
4. NaviGuide 4000. Manual Steering System / [Электронный ресурс] – Режим доступа: http://www.sperrymarine.northropgrumman.com
5. Auto pilot PR-6000 / [Электронный ресурс] – Режим доступа: http://www.tokimec.co.jp/marine
6. PilotStar D / [Электронный ресурс] – Режим доступа: http://www.patronicsgroup.com/files/Autopilots/Raytheon/PilotStarD.pdf
7. Navis JP3000/ [Электронный ресурс] – Режим доступа: http://www.navisincontrol.com/products/joystick-control-system.html
8. Furuno FAP-330/ [Электронный ресурс] – Режим доступа: http://www.unicomm.ru/Default.asp?/D=1161
9. Быков Э.Б. Новое поколение адаптивных авторулевых / Э.Б. Быков, И.И.Туркин, Л.В.Баскаков // Рациональное управление предприятием. – 2007. – №4. – С. 88-91.
10. Інтелектуальні системи підтримки прийняття рішень: Теорія, синтез ефективність / В.О. Тарасов, Б.М. Герасимов, І.О. Левін, В. О. Корнійчук. – К.: МАКНС, 2007. – 336 с.
11. Применение методов искусственного интеллекта в управлении проектами / Н.М. Бабынин, В.Я. Жихарев, В.М. Илюшко и др. / под ред. Соколова А.Ю. – Х.: НАУ ²ХАИ², 2002. – 474 с.
12. Степанов М.Ф. Интеллектуальные самоорганизующиеся системы автоматического управления – триада ²теория автоматического управления – информационные технологии – искусственный интеллект² / Степанов М.Ф. // Информационные технологии. – 2001. - №11. – С.24-29.
13. Кучеров Д.П. Интеграция информационных технологий при обучении принятию решений в задачах терминального управления / Д.П. Кучеров, В.И. Скурихин, Л.С. Житецкий // Управляющие системы и машины. – 2003. - № 5. – С.30 – 41.
14. Saridis G.N. Analitical formulation of the principle of increasing precision with decreasing intelligence for intelligent machines / Saridis G.N. // Automatica. – 1989. – №3. – P.
15. Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности / Митрахович М.М. // Автоматика. Автоматизация. Электротехнические комплексы и системы. – Херсон: Херсон НТУ, 2008. – № 2 (22). – С. 46-53.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Информационно-управляющие комплексы и системы
Теленик С.Ф., Ролік О.І., Букасов М.М., Андросов С.А. Генетичні алгоритми вирішення задач управління ресурсами і навантаженням центрів оброблення данихБогушевский В.С., Сухенко В.Ю., Сергеева Е.А., Жук С.В. Реализация модели управления конвертерной плавкой в системе принятия решений
Бень А.П., Терещенкова О.В. Применение комбинированных сетевых методов планирования в судоремонтной отрасли
Цмоць І. Г., Демида Б.А., Подольський М.Р. Методи проектування спеціалізованих комп’ютерних систем управління та обробки сигналів у реально-му час
Теленик С.Ф., РолікО.І., Букасов М.М., РимарР.В., Ролік К.О. Управління навантаженням і ресурсами центрів оброблення даних при виділених серверах
Селякова С. М. Структура інтелектуальної системи управління збиральною кампанією
Еременко А.П., Передерий В.И. Принятие решений в автоматизированных системах с учетом психофункциональных характеристик оператора на основе генетических алгоритмов
Львов М.С. Алгоритм перевірки правильності границь змінення змінних у послідовних програмах
Ляшенко Е.Н. Анализ пожарной опасности сосновых насаждений в зоне Нижне-днепровских песков – самой большой пустыни в Европе
Касаткина Н.В., Танянский С.С., Филатов В.А. Методы хранения и обработки нечетких данных в среде реляционных систем
Ходаков В.Е., Жарикова М.В., Ляшенко Е.Н. Применение когнитивного подхода для решения задачи поддержки принятия управленческих решений при ликвидации лесных пожаров
Гончаренко А.В. Моделювання впливу ентропії суб’єктивних переваг на прийняття рішень стосовно ремонту суднової енергетичної установки
Фарионова Н.А. Системный подход построения алгоритмов и моделей систем поддержки принятия решений при возникновении нештатных ситуаций
Биленко М.С., Серов А.В., Рожков С.А., Буглов О.А. Многоканальная система контроля качества текстильных материалов
Мотылев K.И., Михайлов M.В., Паслен В.В. Обработка избыточной траекторной информации в измерительно-вычислительных системах
Гончаренко А.В. Вплив суб’єктивних переваг на показники роботи суднової енергетичної установки
Гульовата Х.Г., Цмоць І.Г., Пелешко Д.Д. Архітектура автоматизованої системи моніторингу і дослідження характеристик мінеральних вод
Соломаха А.В. Разработка метода упреждающей компенсации искажений статорного напряжения ад, вносимых выходными силовыми фильтрами
ПотапенкоЕ.М., Казурова А.Е. Высокоточное управление упругой электромеханической системой с нелинейным трением.
Кузьменко А.С., Коломіц Г.В., Сушенцев О.О. Результати розробки методу еквівалентування функціональних особливостей fuzzy-контролерів
Кравчук А. Ф., Ладанюк А.П., Прокопенко Ю.В. Алгоритм ситуационного управления процессом кристаллизации сахара в вакуум-аппарате периодического действия с механическим циркулятором
Абрамов Г.С., Иванов П.И., Купавский И.С., Павленко И.Г. Разработка навигационного комплекса для автоматического наведения на цель системы груз-управляемый парашют
Литвиненко В.И., Четырин С.П. Компенсация ошибок оператора в контуре управления следящей системы на основе синтезируемых вейвелет-сетей
Бардачев Ю.Н., Дидык А.А. Использование положений теории опасности в искусственных иммунных системах
Рожков С.О., Кузьміна Т.О., Валько П.М. Інформаційна база як основа для створення асортименту лляних виробів.
Ускач А.Ф., Становский А.Л., Носов П.С. Разработка модели автоматизированной системы управления учебным процессом
Мазурок Т.Л., Тодорцев Ю.К. Актуальные направления интеллектуализации системы управления процессом обучения.
Ускач А.Ф., Гогунский В.Д., Яковенко А.Е. Модели задачи распределения в теории расписания.
Сідлецький В.М., Ельперін І.В., Ладанюк А.П. Розробка алгоритмів підсистеми підтримки прийняття рішень для контролю якості роботи дифузійного відділення.
Пономаренко Л.А., Меликов А.З., Нагиев Ф.Н. Анализ системы обслуживания с различными уровнями пространственных и временных приоритетов.
Коршевнюк Л.О. Застосування комітетами експертів системи нечіткого логічного виводу із зваженою істинністю.. – С. 73 – 79.
Кирюшатова Т.Г., Григорова А.А Влияние направленности отдельных операторов и направленности всей группы на конечный результат выполнения поставленной задачи.
Петрушенко А.М., Хохлов В.А., Петрушенко І.А. Про підключення до мови САА/Д деяких засобів паралельного програмування пакету МРІСН.
Ходаков В.Е., Граб М.В., Ляшенко Е.Н. Структура и принципы функционирования системы поддержки принятия решений при ликвидации лесных пожаров на базе новых геоинформационных технологий.
Сидорук М.В., Сидорук В.В. Информационные системы управления корпорацией в решении задач разработки бюджета.
Нагорный Ю.И. Решение задачи автоматизированного расчета надежности иасуп с использованием модифицированного метода вероятностной логики
Козак Ю.А. Колчин Р.В. Модель информационного обмена в автоматизированной системе управления запасами материальных ресурсов в двухуровневой логистической системе
Гожий А.П., Коваленко И.И. Системные технологии генерации и анализа сценариев
Вайсман В.А., Гогунский В.Д., Руденко С.В. Формирование структур организационного управления проектами
Бараненко Р.В., Шаганян С.М., Дячук М.В. Аналіз алгоритмів взаємних виключень критичних інтервалів процесів у розподілених системах
Бабенко Н.И., Бабичев С.А. Яблуновская Ю.А. Автоматизированная информационная система управления учебным заведением
Яковенко А.Е. Проектирование автоматизированных систем принятия решений в условиях адаптивного обучения с учетом требований болонского процесса
Бараненко Р.В Лінеаризація шкали і збільшення діапазону вимірювання ємностей резонансних вимірювачів
Головащенко Н.В. Математичні характеристики шумоподібно кодованих сиг-налів.
Шерстюк В.Г. Формальная модель гибридной сценарно-прецедентной СППР.
Шекета В.І. Застосування процедури Append при аналізі абстрактних типів даних модифікаційних запитів.
Цмоць І.Г. Алгоритми та матричні НВІС-структури пристроїв ділення для комп'-ютерних систем реального часу.
Кухаренко С.В., Балтовский А.А. Решение задачи календарного планирования с использованием эвристических алгоритмов.
Бараненко Р.В., Козел В.Н., Дроздова Е.А., Плотников А.О. Оптимизация рабо-ты корпоративных компьютерных сетей.
Нестеренко С.А., Бадр Яароб, Шапорин Р.О. Метод расчета сетевых транзакций абонентов локальных компьютерных сетей.
Григорова А.А., Чёрный С. Г. Формирование современной информационно-аналитической системы для поддержки принятия решений.
Шаганян С.Н., Бараненко Р.В. Реализация взаимных исключений критических интервалов как одного из видов синхронизации доступа процессов к ресурсам в ЭВМ
Орлов В.В. Оценка мощности случайного сигнала на основе корреляционной пространственной обработки
Коджа Т.И., Гогунский В.Д. Эффективность применения методов нечеткой логики в тестировании.
Головащенко Н.В., Боярчук В.П. Аппаратурный состав для улучшения свойств трактов приёма – передачи информации в системах промышленной автоматики.