УДК 681.5.015
МЕТОД ОЦІНКИ МАКСИМАЛЬНОГО ЗАПІЗНЕННЯ ЕЛЕМЕНТІВ ФІЛЬТРОВАНОГО ВХОДУ НЕЙРОЕМУЛЯТОРІВ З ЗОВНІШНЬОЮ ДИНАМІКОЮ
Щокін В.П.
Моделювання нелінійних динамічних процесів переслідує мету щодо рішення задач прогнозування, імітаційного моделювання, а також побудови систем регулювання та діагностики похибок, що базуються на параметричних та непараметричних моделях. Ідентифікація (емуляція) нелінійних динамічних систем на базі використання штучних нейронних мереж (ШНМ) представляє непараметричне моделювання, оскільки параметри ШНМ не мають безпосереднього фізичного зв'язку з параметрами об'єкта.
Проблема та її зв'язок з науковими та практичними завданнями
За теперішнього часу знайшли широке розповсюдження дискретні способи передачі і перетворення сигналів, в яких використовується принцип дискретизації сигналів за часом, за рівнем або за часом і за рівнем одночасно.
Дискретно-неперервні фільтри виконують над вхідними змінними операції зсуву та зважування. Рівняння дискретно-неперервного фільтру визначають у наступній формі:
![]() , (1)
, (1)
де ![]() - вхідний сигнал,
- вхідний сигнал, ![]() - вихідний сигнал,
- вихідний сигнал, ![]() та
та ![]() - вагові коефіцієнти вхідних та вихідних ретроспективних змінних відповідно.
- вагові коефіцієнти вхідних та вихідних ретроспективних змінних відповідно.
Рівняння (1) представляє різницеве рівняння з аргументом t, який змінюється в неперервному просторі. Основним елементом дискретного фільтру є елемент пам'яті (затримки), який, не змінюючи форми, проводить операцію зсуву вхідного сигналу на дискрет Т.
Необхідно зауважити, що проблема визначення вектора стану дискретно-неперервних фільтрів (1) у сучасній літературі не розглядається. Однак дане питання є доволі суттєвим у разі використання рівняння дискретно-неперервного фільтру (1) при ідентифікації об’єктів керування нейромережевими системами прямої та зворотної динаміки.
Аналіз досліджень і публікацій, в яких започатковано розв’язання проблеми
Доведено [1], що цифрові обчислювальні машини (ЦОМ) можуть бути представлені в форматі дискретного фільтра з функціями перетворення вхідної послідовності чисел ![]() у вихідну
у вихідну ![]() . Якщо не брати до уваги квантування за рівнем та обмежитися лінійними операціями, рівняння ЦОМ представляють [1] у вигляді (1) з урахуванням заміни
. Якщо не брати до уваги квантування за рівнем та обмежитися лінійними операціями, рівняння ЦОМ представляють [1] у вигляді (1) з урахуванням заміни ![]()
![]() . (2)
. (2)
Запропонована [1] програма ЦОМ (1) оперує дискретними функціями входу та виходу, отже, в даному разі операції, що проводяться з використанням ЦОМ, є можливість аналізувати шляхом дослідження відповідних дискретних фільтрів.
Вище зазначено, що рівняння дискретних фільтрів широко застосовують у нейрокеруванні при побудові структур нейронної ідентифікації динаміки об'єктів управління [2,4]. Так, при структурному синтезі моделі прямої динаміки об'єктів управління з використанням парадигм нейронних мереж (НМ) використовують [2] апроксимуючу властивість НМ (3)
![]() . (3)
. (3)
В якості вектору стану мережі обирають [2] вектор
![]() , (4)
, (4)
де ![]() - оператор зсуву.
- оператор зсуву.
Результатом ідентифікації динамічної моделі реального об'єкту управління в сенсі наближення функцій виходу ![]() та
та ![]() з точністю до похибки навчання нейронної мережі
з точністю до похибки навчання нейронної мережі ![]() , або функціонала
, або функціонала ![]() можуть бути параметрично синтезовані [2] за певним алгоритмом значення вагових коефіцієнтів синоптичних зв'язків
можуть бути параметрично синтезовані [2] за певним алгоритмом значення вагових коефіцієнтів синоптичних зв'язків ![]() у шарах НМ
у шарах НМ ![]() та оцінці вектора стану об'єкта, що описується, в загальному випадку параметрично недовизначеним нелінійним диференційним рівнянням:
та оцінці вектора стану об'єкта, що описується, в загальному випадку параметрично недовизначеним нелінійним диференційним рівнянням:
![]() . (5)
. (5)
Необхідно відзначити, що на даний час відсутнє будь-яке пояснення, або теоретичне обґрунтування глибини вектора стану (n та m) нейронної мережі. З метою підтвердження останнього розглянемо постановку задачі динамічного навчання ШНМ з прогнозом похибки навчання [2]. У даній роботі в якості математичної моделі об'єкта управління прийняте різницеве рівняння «вхід-вихід» з посиланням на першоджерело [3]. У роботі доводять, що практично прийнятним буде опис багатопов'язаного об'єкту з n-вхідними та n-вихідними координатами системою різницевих рівнянь порядку ![]()
![]() . (6)
. (6)
де ![]() - оператор зсуву на час
- оператор зсуву на час ![]() .
.
Додатково відзначено [2], що при значеннях ![]() , і з запасом, який задовольняє умові теореми Котельникова-Шеннона, та одночасно більших, ніж інерційність хоча б одного циклу навчання, приймають припущення про те, що на інтервалах часу навчання НМ виміряні сигнали
, і з запасом, який задовольняє умові теореми Котельникова-Шеннона, та одночасно більших, ніж інерційність хоча б одного циклу навчання, приймають припущення про те, що на інтервалах часу навчання НМ виміряні сигнали ![]() мають значимі та кінцеві величини похідних не вище другої.
мають значимі та кінцеві величини похідних не вище другої.
Дане припущення дозволяє обмежити порядки ![]() поліномів
поліномів ![]() при координатах
при координатах ![]() (
(![]() ) у системі (6) значенням
) у системі (6) значенням ![]() та, відповідно, обмежити клас можливих математичних моделей об'єкта управління системою n-пов'язаних різницевих рівнянь другого порядку
та, відповідно, обмежити клас можливих математичних моделей об'єкта управління системою n-пов'язаних різницевих рівнянь другого порядку
![]() , (7)
, (7)
де ![]() та
та ![]() - вектори вхідних та вихідних сигналів об'єкта управління;
- вектори вхідних та вихідних сигналів об'єкта управління; ![]() та
та ![]() - матриці поліномів
- матриці поліномів ![]() .
.
Загальне дослідження проблеми визначення вектору стану нейромережевих емуляторів об’єктів управління висвітлено в роботі [4], де зазначено, що за відсутності методики оцінки порядку об'єкту управління і, відповідно, визначення порядку різницевих рівнянь виду
![]() , (8)
, (8)
незначні зміни в початкових умовах, опорних величинах, структурах нейронних мереж, функціях активації нейронів і т.п. призводять до різких змін характеристик системи управління з ШНМ. Разом з тим, у даній роботі також не вирішена проблема оцінки глибини ретроспективного вектору стану нейромережевих емуляторів і запропоновано використовувати другий порядок поліномів ![]() при координатах
при координатах ![]() (
(![]() ).
).
Виділення невирішених раніше частин проблеми та постановка завдання
Зважаючи на викладене вище, слід зауважити, що проблема визначення (оцінки) глибини ретроспективного вектору стану нейромережевих емуляторів є доволі принциповою, що додатково ілюструє наступний модельний приклад.
Модельний приклад. У дискретному просторі динаміка лінійного об'єкту може бути описана у вигляді різницевого рівняння, в основі якого лежить рівняння дискретно-неперервного фільтру (1):
![]() , (9)
, (9)
де у[i] – поточний вихід об'єкту на i-у дискретному відліку, ![]() та
та ![]() – ретроспективні вектори розмірністю m і n, що складаються із затриманих на інтервал дискретності вхідних і вихідних значень об'єкту відповідно, aj і bj – постійні коефіцієнти.
– ретроспективні вектори розмірністю m і n, що складаються із затриманих на інтервал дискретності вхідних і вихідних значень об'єкту відповідно, aj і bj – постійні коефіцієнти.
Оскільки вираз (9), що описує пряму динаміку об'єкту в загальному випадку можна розглядати як безінерційну функцію m+n аргументів:
![]() , (10)
, (10)
то за наявності масиву відомих значень вхід/вихід об'єкту (навчальних кортежів) її легко шляхом навчання можна представити і у вигляді статичної нейронної мережі яка входить до структури системи нейроуправління. Причому у загальному випадку ця мережа є нелінійною і представляє нелінійне різницеве рівняння, що дозволяє описувати динаміку нелінійних об'єктів.
Розглянемо результати чисельного моделювання процедур нейроідентифікації прямої динаміки еталонної моделі другого порядку в структурі системи безпосереднього інверсного нейроуправління (рис.1).
Рис.1 Загальний вид функціональної схеми системи безпосереднього інверсного нейроуправління
У представленій схемі використовується дискретна реалізація еталонної моделі. Блоками з абревіатурою TDL - Tapped Delay Line позначені лінії затримки з відведеннями або ретроспективні вектори, що складаються з серій затриманих на інтервал дискретизації вхідних значень. Верхнє відведення блоку TDL відповідає його поточному вхідному значенню, яке може і не використовуватися.
Завдяки лінійності об'єкту, що підлягає ідентифікації, знімаються питання вибору структури нейромережі, алгоритму та надійності навчання. В якості структури нейромережі використаємо ШНМ Адалайн (зважена сума вхідного вектора) з лінійно-регресійним алгоритмом навчання. В якості ідентифікаційного сигналу буде використовуватись послідовність ступінчастих дій випадкової амплітуди в діапазоні ±1 з інтервалом 1 с. (загальна тривалість - 100 с).
В якості об'єкту прийнятий динамічний об'єкт другого порядку
![]() , (11)
, (11)
в якості еталонної моделі використана аперіодична ланка з постійною часу 0.2с
![]() . (12)
. (12)
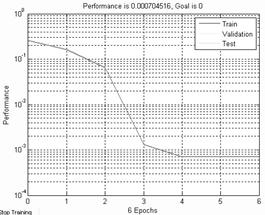
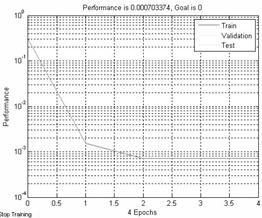
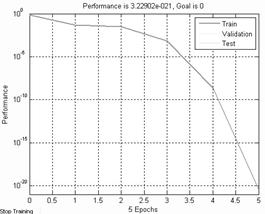
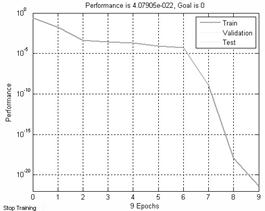
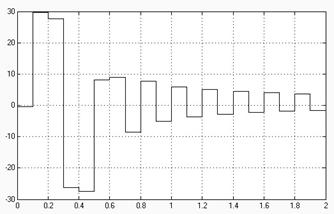
Динамічна зміна похибки в процесі навчання для різної глибини ретроспективного вектору стану нейромережевого емулятора інверсної динаміки (19-23) наведена на рис.2.
![]() (13)
(13)
![]() (14)
(14)
![]() (15)
(15)
![]() (16)
(16)
а) б)
в) г)
Рис.2 Динаміка зміни похибки нейромережі в процесі її навчання
Результати експерименту свідчать про актуальність проблеми визначення глибини ретроспективного вектору стану нейромережевого емулятора. Так, відповідно до результатів моделювання (рис.2) оптимальним за критерієм «ефективність емуляції-структура нейромережі» є набір навчальних кортежей (15), відповідна динаміка навчання наведена на рис.2.в. Відхилення в бік зменшення або збільшення глибини ретроспективних даних призводить до збільшення похибки емуляції (рис.2,а,б) або до заморожування навчання з одночасним підвищенням кількості нейронів у вхідному шарі (рис.2.г).
Необхідно зауважити, що даний експеримент проведено на базі використання заздалегідь відомої структури об'єкту керування – відомий порядок модельного диференційного рівняння, який відповідає оптимальній, з точки зору обраного критерію, глибині ретроспективного вектору стану нейромережевого емулятора. Однак, за відсутності фактичного математичного опису багатомірної (nD) системи рішення проблеми, визначення глибини ретроспективного вектору стану носить умовний характер [2,4], сутність якого розглянута вище.
Результати попередньо проведених робіт [6,7] дозволяють стверджувати про задовільну інформативність кінцевих різниць перехідної функції об'єкту управління щодо глибини ретроспективного вектору стану нейромережевих та fuzzy емуляторів. Нижче розглядаються теоретичні аспекти запропонованої методики оцінки глибини ретроспективного вектору стану інтелектуальних емуляторів.
Теорема: якщо будь-яка k-а різниця від перехідної функції ![]() динамічного об'єкта, що визначена в дискретному просторі
динамічного об'єкта, що визначена в дискретному просторі ![]() , виявиться приблизно постійною, в межах необхідної точності
, виявиться приблизно постійною, в межах необхідної точності ![]() , то перехідна функція об'єкту управління для свого відтворення інтелектуальними емуляторами з похибкою
, то перехідна функція об'єкту управління для свого відтворення інтелектуальними емуляторами з похибкою ![]() потребує k-ої глибини ретроспективного вектору стану.
потребує k-ої глибини ретроспективного вектору стану.
Доказ: розглянемо парадигми нейронних мереж прямого розповсюдження з одним внутрішнім шаром та безперервною функцією активації внутрішнього шару, функція активації вихідного шару - лінійна. Доказ наведеної теореми проведемо на базі дослідження задачі апроксимації табличних перехідних функцій за допомогою НМ з даного класу. Для вирішення задачі апроксимації потрібно навчити НМ - тобто оцінити значення параметрів НМ (синоптичних ваг), які настроюються у функції мінімізації помилки апроксимації.
Навчання НМ - процес мінімізації нелінійної багатоекстремальної функції багатьох змінних, причому кількість локальних екстремумів експоненціально залежить від розмірності задачі і кількості інтерполяційних вузлів. Відтворення НМ табличної функції представляють в наступному вигляді:
 , (17)
, (17)
де N - розмірність вектора аргументів x; H - кількість нейронів внутрішнього шару; ![]() - вхідний вектор;
- вхідний вектор; ![]() - (зовнішні ваги) і
- (зовнішні ваги) і ![]() - (внутрішні ваги) - параметри функції NET, що настроюються;
- (внутрішні ваги) - параметри функції NET, що настроюються; ![]() - функції активації нейронів внутрішнього шару.
- функції активації нейронів внутрішнього шару.
Визначимо ![]() , p = 1,2..,P - деяка множина вимірювань перехідної функції, яку необхідно апроксимувати. Завдання навчання мережі NET на вибірці SET формулюється як завдання мінімізації середньоквадратичного відхилення MSE вихідних сигналів мережі NET від у-компонентів вибірки SET. Цільова функція даного оптимізаційного завдання має вид:
, p = 1,2..,P - деяка множина вимірювань перехідної функції, яку необхідно апроксимувати. Завдання навчання мережі NET на вибірці SET формулюється як завдання мінімізації середньоквадратичного відхилення MSE вихідних сигналів мережі NET від у-компонентів вибірки SET. Цільова функція даного оптимізаційного завдання має вид:
![]() . (18)
. (18)
Визначені та доведені [8] наступні властивості навчання НМ:
· властивість #1: при фіксованих значеннях внутрішніх вагових коефіцієнтів w є можливість отримати оптимальні значення зовнішніх вагових коефіцієнтів v, розв’язавши лінійну задачу за методом найменших квадратів.
· властивість #2: при «заморожених» значеннях зовнішніх вагових коефіцієнтах v при кількості нейронів внутрішнього шару H=1, має місце наступна альтернатива:
1) або існує такий набір внутрішніх вагових коефіцієнтів ![]() , для якого
, для якого ![]() , і даний набір вагових коефіцієнтів можна отримати в форматі рішення системи лінійних рівнянь;
, і даний набір вагових коефіцієнтів можна отримати в форматі рішення системи лінійних рівнянь;
2) або для будь-яких значень внутрішніх вагових коефіцієнтів ![]() справедливо
справедливо ![]() .
.
· властивість #3: за умови справедливості властивості #2, та якщо P £ (N + 1) і вектори ![]() лінійно незалежні, то має місце альтернатива 1 (
лінійно незалежні, то має місце альтернатива 1 (![]() ) властивості #2.
) властивості #2.
У разі постійного значення дискрету розглянемо питання послідовних різностей перехідної функції ![]() :
:
![]() (19)
(19)
В якості базового емулятора перехідної функції оберемо ШНМ з глибиною ретроспективного вектора стану n=m=1, яка є апроксиматором динаміки об'єкту за наступним рівнянням дискретно-неперервного фільтру (2)
![]() . (20)
. (20)
Для спрощення доказу теореми перейдемо у двовимірний простір, припустивши, що рівняння (20) має властивість #3, дане припущення дозволяє розглядати (20) з точки зору інтерполяції функції ![]() поліном другого ступеня
поліном другого ступеня
![]() . (21)
. (21)
Перша різниця зводиться до виду
![]() . (22)
. (22)
Виходячи з даного представлення, друга кінцева різниця зводиться до постійного значення
![]() . (23)
. (23)
Останнє дозволяє стверджувати, що показник кінцевих різниць, для яких виконується умова (24), відповідає ступеню апроксимаційного полінома який рівномірно апроксимує функцію з точністю ![]() на інтервалі дослідження.
на інтервалі дослідження.
![]() . (24)
. (24)
Доведено [5], що якщо статистичні дані точно відображаються поліномом k-го ступеня, то побудована за ними k-а різниця повинна бути точно постійною. Однак, з урахуванням неповної відповідності емпіричних формул опитним даним та похибок округлення на абсолютну точність претендувати немає можливості [5].
Виходячи з вищезазначеного у практичних задачах цілком допустимо спиратись на наступне: якщо будь-яка k-а різниця функції виявиться приблизно постійною, в межах необхідної точності ![]() , можна зробити висновок про те, що перехідна функція або часова характеристика об'єкту управління для свого відтворення з необхідною точністю потребує саме поліному k-го ступеню, отже, глибина ретроспективного вектору стану нейромережевого або fuzzy емулятора може бути визначена також k-им ступенем.
, можна зробити висновок про те, що перехідна функція або часова характеристика об'єкту управління для свого відтворення з необхідною точністю потребує саме поліному k-го ступеню, отже, глибина ретроспективного вектору стану нейромережевого або fuzzy емулятора може бути визначена також k-им ступенем.
Перевіримо викладені теоретичні аспекти на модельному прикладі який розглянуто вище (рис.1). В якості об'єкту обрана коливальна ланка з передаточною функцією (11), для якої проведена дискретизація перехідної функції ![]() за часом (табл.1)
за часом (табл.1) ![]() та розраховані кінцеві різниці. Результати аналізу кінцевих різниць свідчать про те, що значення кінцевої різниці другого порядку
та розраховані кінцеві різниці. Результати аналізу кінцевих різниць свідчать про те, що значення кінцевої різниці другого порядку![]() є приблизно (точність 5%) постійними. Отже, емуляція зворотної динаміки об'єкту управління (11) може бути проведена ШНМ з глибиною вектору стану m=n=2. На ШНМ інверсної динаміки покладені функції апроксимації наступної функції зворотної динаміки об'єкта
є приблизно (точність 5%) постійними. Отже, емуляція зворотної динаміки об'єкту управління (11) може бути проведена ШНМ з глибиною вектору стану m=n=2. На ШНМ інверсної динаміки покладені функції апроксимації наступної функції зворотної динаміки об'єкта
![]() (25)
(25)
Таблиця 1 / Кінцеві ризниці перехідної функції
|
Рис.3.а Графік зміни сигналу управління u[i] |
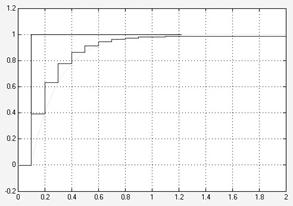
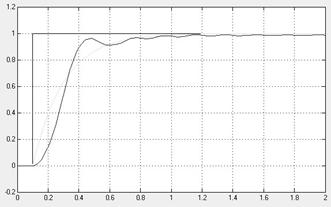
б) в)
Рис. 3 Графік зміни сигналу завдання і вихідного значення ШНМ еталонної моделі r[i+1] (б) та перехідний процес вихідної координати об'єкта y(t) поєднаний з пп еталонної моделі r[t] (в) при дискретизації 0.1с.
Результати моделювання свідчать про достатню інформативність кінцевих різниць перехідної функції щодо визначення глибини вектору стану нейромережевих та fuzzy емуляторів багатомірних (nd) систем.
Висновки
Наведена методика оцінки глибини ретроспективного вектору стану нейромережевого або fuzzy емулятора, яка ґрунтується на визначенні кінцевих різниць перехідної функції багатомірних (nd) систем. Дана методика дозволяє визначати глибину ретроспективного вхідного вектору емуляторів, орієнтованих на відтворення прямої та зворотної динаміки багатомірних (nd) систем за відсутності їх моделей.
A ground is conducted component retrospective set of data for a construction optimum on a structure and functional possibilities of fuzzy-neural structure for authentication of dynamics of objects.
1. Цыпкин Я.З. Основы теории автоматических систем.-М.: Главная редакція фізико-математической литературы. «Наука», 1977.
2. Терехов В.А., Ефимов Д.В., Тюкин И.Ю. Нейросетевые системы управления. Общая редакция А.И.Галушкина. – М.: ИПРЖР, 2002.-Кн.8.
3. Катковник В.Я., Полуэктов Р.А. Многомерные дискретные системы управления. – М.: Наука, 1966.
4. Омату С., М.Халид, Р.Юсоф. Нейроуправление и его приложения.– М.: ИПРЖР, 2000.- Кн.2.
5. Фихтенгольц Г.М. Математика для инженеров.– Ленинград: ГТТИ, 1933.- Ч.2.
6. Розроблення методології синтезу та обґрунтування доцільності впровадження інтелектуальних гібридних систем автоматичного управління технологічними процесами на основі нейромережевих структур та методів нечіткої логіки: Звіт з НДДКР (відп. вик. Щокін В.П.)/ Криворізький технічний університет. – 5.04.3 № ДР0104U004720. – Кривий Ріг, 2005.-250 с.
7. Розроблення методу та програмного забезпечення нейронечіткого планування енергетичного аудита на об'єктах енергоємних виробництв: Звіт з НДДКР за грантом Президента України № Ф11/11-2006 (наук. керівник Щокін В.П.)/ Криворізький технічний університет. – GP/F11/0002 № ДР0106U009498. – Кривий Ріг, 2006.-155 с.
8. Осовский С. Нейронные сети для обработки информации / Пер. с польського И.Д.Рудинского. – М.: Финансы и статистика, 2002.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Цифровые и дискретные системы управления
Кочкарьов Ю.О., Кущ С.О., Панаско О.М. Ефективна схемотехніка цифрових вузлів елемента додавання кон’юнкціїКлименко А.К. Об использовании дискретной обратной модели в системах с интегрирующим звеном
Голінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи із цифровим регулятором на заданий показник коливності
Ситников В.С., Брус А.А. Анализ коэффициентов перестраиваемого цифрового фильтра нижних частот второго порядка.
Бобриков С.А., Воевода А.Б., Лебедева Т.А. Расчет цифрового управляющего устройства для линейного объекта с запаздыванием
Усов А.В., Ситников В.С. Возможности построения передаточных функций линейных цифровых частотно-зависимых вторичных преобразователей по частотным характеристикам
Орлов В.В. Экономичная реализация обнаружителей сигналов на основе решетчатых фильтров
Ситников В.С. Анализ путей уменьшения погрешностей цифровых устройств с фиксированной точкой.
Ситников В.С. Реализация цифрового фильтра высокого порядка в каскадной форме по критерию минимума выходного шума квантования.
Орлов В.В. Влияние квантования обучающих выборок на эффективность цифровых адаптивных фильтров компенсации помех.
Ситников В.С. Оценка верхней границы ошибок квантования в цифровом фильтре с фиксированной точкой.