УДК 681.5.015.8:519
НАСТРОЙКА СИСТЕМИ ІЗ ЦИФРОВИМ РЕГУЛЯТОРОМ НА ЗАДАНИЙ ПОКАЗНИК КОЛИВНОСТІ
Голінко І.М., Ковриго Ю.М., Кубрак А.І.
Вступ
При дослідженні аналогових систем керування (зокрема, систем із запізненням та розподіленими параметрами) широко використовуються частотні методи: критерій Найквіста для оцінки стійкості системи, налагодження системи на заданий показник коливності; тощо.
Ці методи мають наочну графічну інтерпретацію. Годограф амплітудно–фазової характеристики (АФХ) розімкненої системи охоплює або не охоплює точку ![]() , заходить чи не заходить в середину М–кола [1]… . Такий підхід робить розрахунок системи наочним та інтерактивним.
, заходить чи не заходить в середину М–кола [1]… . Такий підхід робить розрахунок системи наочним та інтерактивним.
Постановка завдання
Якщо у системі керування використано цифровий ПІД-регулятор, а час квантування малий порівняно із інерційністю об’єкта керування (ОК), то у першому наближенні для розрахунку можна використовувати аналогові методи настройки системи керування. А що робити коли час квантування більший за половину періоду, що відповідає частоті зрізу (теорема Котельникова [1])…? У цьому випадку використання аналогових методів неприйнятне.
Розглянемо детальніше цифровий регулятор (ЦР). ЦР містить: амплітудноімпульсний модулятор, що перетворює неперервний сигнал на послідовність імпульсів із часом квантування T; функцію перетворення, яка реалізує закон керування (як правило, ПІД–закон) та демодулятор (частіше усього – фіксатор нульового порядку), що забезпечує постійне значення вихідного сигналу на час T. Якщо розглянути послідовну сукупність цих ланок (де вхідний та вихідний сигнали є неперервні), то є всі підстави, принаймні, формально моделювати ЦР (разом із модулятором та демодулятором) як неперервний (аналоговий).
Аналогова модель цифрового ПІД-регулятора
Передаточна функція цифрового ПІД–регулятора має вид [2]:
![]() , (1)
, (1)
де K1, K2, K3 – пропорційна, інтегральна та диференціальна частини налагодження ПІД–регулятора.
Виходячи із (1) можна отримати рекурентне відношення, що реалізує алгоритм роботи цифрового ПІД–регулятора:
![]() , (2)
, (2)
тут kT – дискретний час на k-му кроці із періодом квантування T; x(kT), u(kT) – сигнал неузгодженості та сигнал керування регулятора на k-му кроці. Змінюючи параметри K1, K2, K3 можна отримати П, І, ПІ, ПД, ПІД–закони регулювання.
Конформне відображення s–площини Лапласа на дискретну z–площину визначається залежністю:
![]() . (3)
. (3)
Враховуючи (3), із (1) отримаємо аналогову модель функції перетворення цифрового ПІД–регулятора:
![]() ;
;
або у класичному вигляді:
 , (4)
, (4)
де TI, TD – час інтегрування та диференціювання ПІД–регулятора ![]() .
.
Крім функції перетворення ЦР включає амплітудноімпульсний модулятор та фіксатор нульового порядку. Вважатимемо, що модулятор реалізує амплітудноімпульсну модуляцію першого роду, тобто в момент часу ![]() вихідний сигнал модулятора дорівнює
вихідний сигнал модулятора дорівнює ![]() . Квантований сигнал xk прийнято представляти імпульсом висотою xk . Енергія імпульсу сигналу характеризується його площею (добутком ширини імпульсу на його висоту). Одиничний імпульс теоретично має нескінчену амплітуду (висоту), нульову ширину, але його площа дорівнює одиниці. Отже, імпульс xk несе енергію рівну xk , тоді як енергія сигналу
. Квантований сигнал xk прийнято представляти імпульсом висотою xk . Енергія імпульсу сигналу характеризується його площею (добутком ширини імпульсу на його висоту). Одиничний імпульс теоретично має нескінчену амплітуду (висоту), нульову ширину, але його площа дорівнює одиниці. Отже, імпульс xk несе енергію рівну xk , тоді як енергія сигналу ![]() на протязі інтервалу квантування має величину
на протязі інтервалу квантування має величину ![]() , якщо ігнорувати зміну сигналу в межах періоду T. Таким чином, виходить, що коефіцієнт передачі модулятора:
, якщо ігнорувати зміну сигналу в межах періоду T. Таким чином, виходить, що коефіцієнт передачі модулятора:
![]() . (5)
. (5)
Фіксатор нульового порядку має передаточну функцію:
![]() . (6)
. (6)
Враховуючи, (4) – (6), отримаємо аналогову модель цифрового ПІД–регулятора:
![]() . (7)
. (7)
Розглянемо частотні характеристики аналогової моделі цифрового ПІД–регулятора (шляхом заміни s на ![]() ) для (4) маємо:
) для (4) маємо:
![]() , (8)
, (8)
де  ,
,  .
.
Якщо розглядати частотні характеристики фіксатора у сукупності із модулятором (ланцюжок: модулятор-фіксатор, коли передаточні функції ланок перемножуються), то система “модулятор-фіксатор” матиме передаточну функцію: ![]() . Відповідна частотна характеристика:
. Відповідна частотна характеристика:
![]() , (9)
, (9)
де ![]() ,
, ![]() .
.
Для розрахунку системи керування зручно мати її АФХ у розімкненому стані:
![]() , (10)
, (10)
тут ![]() . Розглянемо дробово–раціональну частину
. Розглянемо дробово–раціональну частину ![]() :
:
![]() , (11)
, (11)
де ![]() ,
, ![]() . Помножуємо отриманий результат на:
. Помножуємо отриманий результат на:
![]() . (12)
. (12)
Враховуючи (11), (12) ![]() визначається як:
визначається як:
![]() , (14)
, (14)
тут ![]() ,
, ![]() .
.
Розглянутий алгоритм визначення АФХ (10) реалізовано чисельно в середовищі Turbo Pascal. Програма дозволяє розраховувати настройки цифрового регулятора на заданий показник коливності М [1].
Розглянемо деякі результати моделювання рис.1 – рис.3.
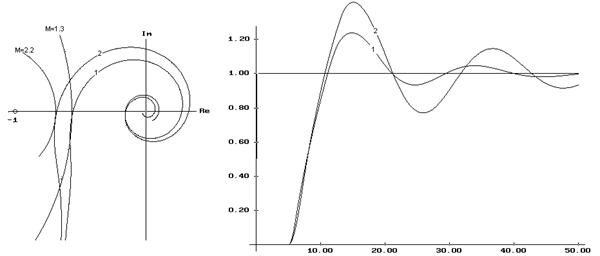
Перше. За критерій налагодження цифрової системи прийнято показник коливності М=1.3. В якості ОК використано аперіодичну ланку другого порядку із запізнюванням: ![]() . Результати моделювання представлено на рис. 1. Як показано на рис. 1 (графік 1) при настройках ЦР: K1=0.14, TI=5, TD=3, T=1 показник коливності М=1.3. Якщо збільшити час квантування регулятора до T=2 без зміни інших параметрів моделювання – показник коливності зросте М=2.2, див. рис. 1 (графік 2). Таким чином, збільшення часу квантування T еквівалентно збільшенню запізнювання, і як наслідок зростає показник коливності системи.
. Результати моделювання представлено на рис. 1. Як показано на рис. 1 (графік 1) при настройках ЦР: K1=0.14, TI=5, TD=3, T=1 показник коливності М=1.3. Якщо збільшити час квантування регулятора до T=2 без зміни інших параметрів моделювання – показник коливності зросте М=2.2, див. рис. 1 (графік 2). Таким чином, збільшення часу квантування T еквівалентно збільшенню запізнювання, і як наслідок зростає показник коливності системи.
а) б)
Рис. 1 Розрахунок параметрів ЦР на заданий показник коливності М, а – АФХ розімкненої системи, б – перехідні процеси у цифровій системі регулювання
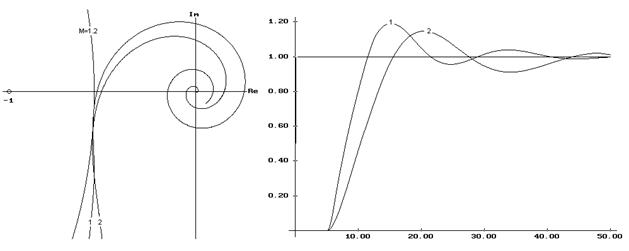
Друге. За критерій налагодження цифрової системи взято показник коливності М=1.2. Передаточна функція ОК – та сама: ![]() . Результати моделювання представлено на рис. 2. Перехідні процеси рис. 2 (графіки 1, 2) забезпечують показник коливності М=1.2. Графік 1 забезпечується настройками ЦР: K1=0.133, TI=5, TD=3, T=1, а графік 2 – K1=0.113, TI=6, TD=3, T=2. Отже, можна зробити висновок, що час квантування T ще один повноцінний параметр настройки ЦР, що впливає на якість перехідних процесів у системі.
. Результати моделювання представлено на рис. 2. Перехідні процеси рис. 2 (графіки 1, 2) забезпечують показник коливності М=1.2. Графік 1 забезпечується настройками ЦР: K1=0.133, TI=5, TD=3, T=1, а графік 2 – K1=0.113, TI=6, TD=3, T=2. Отже, можна зробити висновок, що час квантування T ще один повноцінний параметр настройки ЦР, що впливає на якість перехідних процесів у системі.
а) б)
Рис. 2 Розрахунок параметрів ЦР на заданий показник коливності М, а – АФХ розімкненої системи, б – перехідні процеси у цифровій системі регулювання
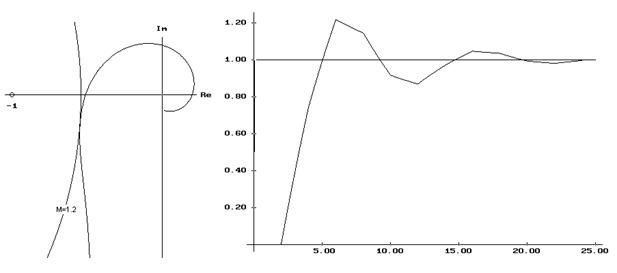
Третє. За критерій налагодження цифрової системи прийнято показник коливності М=1.2. В якості ОК використано аперіодичну ланку першого порядку із запізнюванням: ![]() . Перехідний процес рис. 3 при настройках ЦР: K1=0.8, TI=10, TD=1, T=2 забезпечує показник коливності М=1.2. Перехідний процес носить пилкоподібний характер. Це пояснюється тим, що ОК описується аперіодичною ланкою першого порядку і має інерційність одного порядку із часом квантування ЦР.
. Перехідний процес рис. 3 при настройках ЦР: K1=0.8, TI=10, TD=1, T=2 забезпечує показник коливності М=1.2. Перехідний процес носить пилкоподібний характер. Це пояснюється тим, що ОК описується аперіодичною ланкою першого порядку і має інерційність одного порядку із часом квантування ЦР.
а) б)
Рис. 3 Розрахунок параметрів ЦР на заданий показник коливності М, а – АФХ розімкненої системи, б – перехідний процес у цифровій системі регулювання
Висновки
Аналогове моделювання ЦР (із модулятором перед ним та фіксатором після нього) відкриває можливість застосування частотних методів дослідження систем керування з аналоговим об’єктом та ЦР. При цьому час квантування у ЦР може розглядатися як додатковий параметр налагодження системи.
Анаогове представлення ЦР дає також можливість розрахунку перехідних процесів засобами MatLAB (та подібних їй), а також в середовищі Turbo Pascal. Це дозволяє оцінити вплив вибраного періоду квантування не лише на поведінку набору дискрет у моменти квантування, але і в проміжках між ними. Особливий інтерес це може представляти при досліджені реакції системи керування на збурюючі чинники, що можуть суттєво відрізнятися за формою від 1(t) – типового вхідгого сигналу.
In the article the method of automatic control systems with a digital regulator tuning for the index of oscillation is examined. The method allows to use as criterion of a digital control system tuning the quantization time as the index of oscillation. The offered approach allows to consider time of quantization as an additional setting of a digital control system. The method can be used by automation experts for analysis and the synthesis of digital control systems.
1. В. Я. Ротач Расчет динамики промышленных автоматических систем регулирования. –М.: Энергия, 1973. –440 с: ил.
2. Р. Дoрф, Р. Бишоп Современные системы управления. –М.: Лаборатория Базовых Знаний, 2002. –832 с: ил.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Цифровые и дискретные системы управления
Кочкарьов Ю.О., Кущ С.О., Панаско О.М. Ефективна схемотехніка цифрових вузлів елемента додавання кон’юнкціїКлименко А.К. Об использовании дискретной обратной модели в системах с интегрирующим звеном
Щокін В.П. Метод оцінки максимального запізнення елементів фільтрованого входу нейроемуляторів з зовнішньою динамікою
Ситников В.С., Брус А.А. Анализ коэффициентов перестраиваемого цифрового фильтра нижних частот второго порядка.
Бобриков С.А., Воевода А.Б., Лебедева Т.А. Расчет цифрового управляющего устройства для линейного объекта с запаздыванием
Усов А.В., Ситников В.С. Возможности построения передаточных функций линейных цифровых частотно-зависимых вторичных преобразователей по частотным характеристикам
Орлов В.В. Экономичная реализация обнаружителей сигналов на основе решетчатых фильтров
Ситников В.С. Анализ путей уменьшения погрешностей цифровых устройств с фиксированной точкой.
Ситников В.С. Реализация цифрового фильтра высокого порядка в каскадной форме по критерию минимума выходного шума квантования.
Орлов В.В. Влияние квантования обучающих выборок на эффективность цифровых адаптивных фильтров компенсации помех.
Ситников В.С. Оценка верхней границы ошибок квантования в цифровом фильтре с фиксированной точкой.