УДК 621.311:681.5
АДАПТИВНОЕ УПРАВЛЕНИЕ ТЕПЛОЭНЕРГЕТИЧЕСКИМИ ПРОЦЕССАМИ
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В.
При проектировании систем автоматического регулирования важную роль
играет получение точной математической модели объекта и расчёт настроек
регуляторов с помощью этой модели. Однако, полученные на стадии проектирования
по математической модели объекта настройки регуляторов обычно в значительной
степени отличаются от оптимальных, что объясняется изменением динамических
характеристик с течением времени, а также изменением нагрузки объекта в
процессе его работы. Например, для прямоточного котла тгмп по каналу “подача
топлива – температура за потолочным экраном” коэффициент передачи в диапазоне
рабочих нагрузок изменяется в ![]() раза [1]; в системе автоматического регулирования процесса кондиционирования коэффициент передачи за счёт нелинейности
характеристик изменяется в
раза [1]; в системе автоматического регулирования процесса кондиционирования коэффициент передачи за счёт нелинейности
характеристик изменяется в ![]() раза; в передаточной функции участка регулирования температуры перегретого пара за парогенератором постоянные времени и коэффициент передачи изменяются в
раза; в передаточной функции участка регулирования температуры перегретого пара за парогенератором постоянные времени и коэффициент передачи изменяются в ![]() раза в зависимости от нагрузки.
раза в зависимости от нагрузки.
Кроме того получение точной математической модели затруднено нестационарностью объекта и влиянием на работу системы обслуживающего персонала. Поэтому при пуске объекта работы по настройке аср оказываются неизбежными. При этом возникают организационные проблемы. Из-за большого количества настраиваемых контуров работы по настройке аср требуют высокого проффесионального матерства обслуживающего персонала. Поэтому возникает необходимость применения систем управления, обладающих способностью к самонастройке или адаптивных сау.
На сегодняшний день наиболее высокие показатели качества и устойчивость к наличию промышленных помех показывают линейные регуляторы, а именно пи, пид законы регулирования. Эти алгоритмы характеризуются отсутствием статической ошибки и простотой реализации. Поэтому большинство асу тп построены с использованием именно этих алгоритмов. Этот фактор является определяющим при разработке адаптивных систем регулирования, которые сконцентрированы на коррекцию настроек пи, пид законов регулирования.
Авторами предложено ряд методов и алгоритмов, позволяющих производить коррекцию параметров ПИ, ПИД алгоритмов:
- коррекция по анализу начального участка переходного процесса в замкнутом контуре;
- настройка при подаче возмущения в разомкнутом контуре;
- нечёткая коррекция по анализу показателей качества переходного процесса;
- WAR коррекция [3];
- параметрическая оптимизация по заданному критерию.
Коррекция по анализу начального участка переходного процесса в замкнутом контуре
Для автоматического регулирования
квазистационарных оюъектов предложен алгоритм настройки на основе ПИ, ПИД
регуляторов, который использует информацию о времени ![]() достижения
максимума модуля первой производной выходной величины у(t) (или ошибки регулирования
достижения
максимума модуля первой производной выходной величины у(t) (или ошибки регулирования ![]() ) в точке перегиба
(рис. 1), а также о модуле у(
) в точке перегиба
(рис. 1), а также о модуле у(![]() ) и производной от
у(
) и производной от
у(![]() ) при подаче тестового возмущения по
выходной величине объекта или по заданию.
) при подаче тестового возмущения по
выходной величине объекта или по заданию.
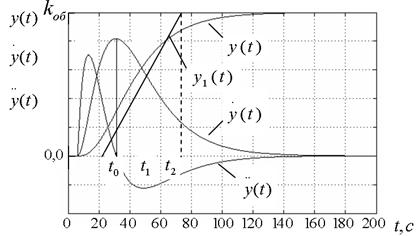
Рис.1. Переходная характеристика, производная и вторая производная от неё.
На рис.1![]() показаны в увеличенном
масштабе:
показаны в увеличенном
масштабе: ![]() .
.
Пошаговая структура алгоритма
Шаг 1. Подача тестового возмущения по выходной величине объекта (или по заданию).
Шаг 2. Определение максимума первой производной от
сигнала рассогласования. Для этого используестя алгоритм сравнения двух
последних измерений модуля производной сигнала рассогласования - ![]() и
и ![]() . В
тот момент, когда новое значение модуля производной сигнала рассогласования
. В
тот момент, когда новое значение модуля производной сигнала рассогласования ![]() становится меньше предыдущего
становится меньше предыдущего ![]() , определение максимума модуля производной
сигнала рассогласования заканчивается. При этом максимальным значением модуля
производной сигнала рассогласования считается
, определение максимума модуля производной
сигнала рассогласования заканчивается. При этом максимальным значением модуля
производной сигнала рассогласования считается ![]() ,
момент достижения этого максимума -
,
момент достижения этого максимума - ![]()
![]() . Кроме того, определяется значение
модуля сигнала рассогласования
. Кроме того, определяется значение
модуля сигнала рассогласования ![]() в момент
в момент ![]() .
.
Шаг 3. По полученным значениям ![]() ,
, ![]() и
и ![]() производится подстройка коэффициента
усиления ПИ, ПИД регулятора по формуле:
производится подстройка коэффициента
усиления ПИ, ПИД регулятора по формуле:
 (1)
(1)
где n – номер шага адаптации, ![]() - эмпирический коэффициент, который
задаёт качество переходного процесса. Диапазон изменения
- эмпирический коэффициент, который
задаёт качество переходного процесса. Диапазон изменения ![]() =1…1,8. Рекомендуемое значение
=1…1,8. Рекомендуемое значение ![]() = 1.44.
= 1.44.
На первом шаге адаптации используется начальное
значение коэффициента усиления регулятора ![]() ,
которое может быть определено с помощью инженерных методов.
,
которое может быть определено с помощью инженерных методов.
Шаг 4. Сравнение нового значения коэфициента
усиления регулятора ![]() с предыдущим
с предыдущим![]() . Если модуль их разности меньше
наперёд заданого значения
. Если модуль их разности меньше
наперёд заданого значения ![]() , то процесс
подстройки заканчивается и в качестве оптимального значения общего коэффициента
усиления считается его последнее значение -
, то процесс
подстройки заканчивается и в качестве оптимального значения общего коэффициента
усиления считается его последнее значение - ![]() , в
противном случае необходимо повторить шаги 1-4 при новом значении коэффициента
усиления
, в
противном случае необходимо повторить шаги 1-4 при новом значении коэффициента
усиления ![]() . Рекомендуемое значение
. Рекомендуемое значение ![]() = 0,1. Для достижения более высоких
показателей качества необходимо уменьшить значение
= 0,1. Для достижения более высоких
показателей качества необходимо уменьшить значение ![]() .
.
Следует отметить, что данный алгоритм относится к классу алгоритмов однопараметрической подстройки. В данном случае корректируется лишь коэффициент усиления регулятора, а время интегрирования и время дифференцирования могут быть определены в начале процесса адаптации с помощью инженерных методик по априорным знаниям о объекте. Структурная схема алгоритма представлена на рис. 2.
При
подаче тестового возмущения на вход объекта данный алгоритм может быть
использован при ![]() =1,9 …2,3. Рекомендуемое
значение
=1,9 …2,3. Рекомендуемое
значение ![]() = 2.1.
= 2.1.
Предложенный
алгоритм позволяет получить переходный процесс с 20% перерегулированием при
изменении параметров объекта на ![]() 50%.
50%.
Кроме
того, данный алгоритм может быть модифицирован для коррекции других параметров,
в частности, времени интегрирования ![]() . Тогда формула для коррекции
выглядит следующим образом:
. Тогда формула для коррекции
выглядит следующим образом:
 .
(2)
.
(2)
При этом, аналогично как и для случая коррекции
коэффициента усиления регулятора, коэффициент ![]() выбирается
в тех же пределах.
выбирается
в тех же пределах.
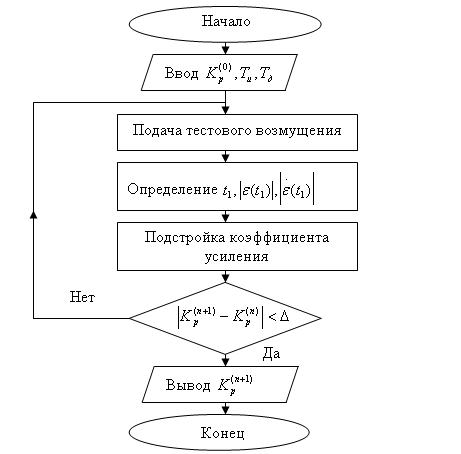
Рис. 2. Структурная схема алгоритма коррекции коэффициента усиления.
Настройка при подаче возмущения в разомкнутом контуре
Для получения высоких показателей качества при первичном включении
системы в действие, разработан алгоритм определения начальных настроек регулятора.
Для определения этих настроек необходимо подать тестовое возмущение на вход
объекта в разомкнутой системе. В результате анализа кривой переходной
характеристики на выходе объекта в момент ![]() (см.
рис. 1) получим значения производной выходной величины
(см.
рис. 1) получим значения производной выходной величины ![]() и
коэффициент усиления объекта
и
коэффициент усиления объекта ![]() . По полученным
значениям
. По полученным
значениям ![]() и
и ![]() определяем
определяем
![]() по следующим зависимостям:
по следующим зависимостям:
 , (3)
, (3)
где ![]() - начальное значение коэффициента
усиления,
- начальное значение коэффициента
усиления, ![]() - начальное значение времени
интегрирования,
- начальное значение времени
интегрирования, ![]() - начальное значение времени
дифференцирования.
- начальное значение времени
дифференцирования.
Рассмотрим теоретическое обоснование зависимостей (3).
Для определения ![]() необходимо провести
касательную в точке перегиба переходной характеристики (рис. 1). Запишем
уравнение прямой проходящей через точку перегиба:
необходимо провести
касательную в точке перегиба переходной характеристики (рис. 1). Запишем
уравнение прямой проходящей через точку перегиба:
![]() , (4)
, (4)
где ![]() - угловой коэффициент прямой.
Поскольку
- угловой коэффициент прямой.
Поскольку
![]() ,
(5)
,
(5)
тогда получим следующее уравнение прямой:
![]() . (6)
. (6)
Поскольку согласно рис. 1 ![]() , то для нахождения
, то для нахождения ![]() необходимо определить моменты времени
необходимо определить моменты времени ![]() и
и ![]() .
Для определения
.
Для определения ![]() необходимо
необходимо ![]() приравнять к 0. Получим:
приравнять к 0. Получим:
![]()
![]()
![]()
 .
(7)
.
(7)
Для определения ![]() необходимо
необходимо ![]() приравнять к
приравнять к ![]() .
Отсюда:
.
Отсюда:
![]()
![]()
![]()
 .
(8)
.
(8)
Тогда  .
(9)
.
(9)
Справедливость зависимости (3) теоретически обоснована.
Нечёткая коррекция по анализу показателей качества переходного процесса
Для построения нечёткого регулятора был разработан нечёткий алгоритм
принятия решения, основанный на использовании скорости нарастания ![]() и динамической ошибки d. Алгоритм предназначен для определения
оптимальных настроек ПИ регулятора по имеющимся показателям качества
регулирования (
и динамической ошибки d. Алгоритм предназначен для определения
оптимальных настроек ПИ регулятора по имеющимся показателям качества
регулирования (![]() и d). Значение переменных были описаны посредством нечётких подмножеств,
функции принадлежности которых приведены в Табл. 1. Нечёткие множества имеют
диапазон изменения: скорость нарастания
и d). Значение переменных были описаны посредством нечётких подмножеств,
функции принадлежности которых приведены в Табл. 1. Нечёткие множества имеют
диапазон изменения: скорость нарастания ![]() ,
динамическая ошибка
,
динамическая ошибка ![]() .
.
Таблица 1
Нечёткие подмножества скорости нарастания и динамической ошибки.
|
Нечеткое подмножество |
Формула |
|
|
|
|
|
|
|
|
|
|
d «малая» |
|
|
d «средняя» |
|
|
d «большая» |
|
Нечёткие значения выбирались следующим образом. Переменная ![]() считается «низкая», если она меньше,
чем 0.3, «средняя», если её значение находится в диапазоне [0.1;0.5],
«высокая», если её значение находится в диапазоне [0.3;0.6]. Переменная d считается «малая», если она меньше, чем 1,
«средняя», если её значение находится в диапазоне [0;1], «большая», если её
значение находится в диапазоне [1;2].
считается «низкая», если она меньше,
чем 0.3, «средняя», если её значение находится в диапазоне [0.1;0.5],
«высокая», если её значение находится в диапазоне [0.3;0.6]. Переменная d считается «малая», если она меньше, чем 1,
«средняя», если её значение находится в диапазоне [0;1], «большая», если её
значение находится в диапазоне [1;2].
Аналогично для выходных значений ![]() определены
функции принадлежности табл.2. Диапазон
изменения: коэффициент усиления
определены
функции принадлежности табл.2. Диапазон
изменения: коэффициент усиления ![]() , время
интегрирования
, время
интегрирования ![]() .
.
Таблица 2
Нечёткие подмножества коэффициента усиления и времени интерирования.
|
Нечеткое подмножество |
Формула |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Набор правил связывающих нечеткие отношения приведен ниже:
1.
Если ![]() «низкая» и d «малая», то «
«низкая» и d «малая», то «![]() »
-«высокий», «
»
-«высокий», «![]() » - «высокий».
» - «высокий».
2.
Если ![]() «низкая» и d «средняя», то «
«низкая» и d «средняя», то «![]() »
-«средний», «
»
-«средний», «![]() » - «высокий».
» - «высокий».
3.
Если ![]() «низкая» и d «большая», то «
«низкая» и d «большая», то «![]() »
-«малый», «
»
-«малый», «![]() » - «высокий».
» - «высокий».
4.
Если ![]() «средняя» и d «малая», то «
«средняя» и d «малая», то «![]() »
-«высокий», «
»
-«высокий», «![]() » - «средний».
» - «средний».
5.
Если ![]() «средняя» и d «средняя», то «
«средняя» и d «средняя», то «![]() »
-«средний», «
»
-«средний», «![]() » - «средний».
» - «средний».
6.
Если ![]() «средняя» и d «большая», то «
«средняя» и d «большая», то «![]() »
-«малый», «
»
-«малый», «![]() » - «средний».
» - «средний».
7.
Если ![]() «высокая» и d «малая», то «
«высокая» и d «малая», то «![]() »
-«высокий», «
»
-«высокий», «![]() » - «низкая».
» - «низкая».
8.
Если ![]() «высокая» и d «средняя», то «
«высокая» и d «средняя», то «![]() »
-«средний», «
»
-«средний», «![]() » - «низкий».
» - «низкий».
9.
Если ![]() «высокая» и d «большая», то «
«высокая» и d «большая», то «![]() »
-«малый», «
»
-«малый», «![]() » - «малый».
» - «малый».
WAR коррекция
В случае существенного изменения параметров объекта предложенные выше
алгоритмы не могут обеспечить необходимых показателей качества. Для решения
этой задачи авторами предложена WAR коррекция времени интегрирования ![]() в
комбинации с коррекцией коєффициента усиления
в
комбинации с коррекцией коєффициента усиления ![]() по
анализу начального участка переходного процесса. WAR коррекция основана на использовании упорядоченных правил
регулирования, которые действительны для выбранных характеристик и подобно
нечёткому регулятору представляют базу знаний.
по
анализу начального участка переходного процесса. WAR коррекция основана на использовании упорядоченных правил
регулирования, которые действительны для выбранных характеристик и подобно
нечёткому регулятору представляют базу знаний.
Введём переменные;
![]() (10)
(10)
 (11)
(11)
![]() .
(12)
.
(12)
Где ![]() - минимальное значение
- минимальное значение ![]() за время
за время ![]() ,
, ![]() - заданое значение выходной величины.
- заданое значение выходной величины.
Правила, описывающие стратегию коррекции имеют вид:
если ![]() , то
, то ![]() ,
(13)
,
(13)
если ![]() , то
, то ![]() .
(14)
.
(14)
Величины ![]() определяются
экспериментально для выделенного класса объектов и могут уточняться в процессе
наладки. Критерием останова итерационного процесса является выполнение
неравенств:
определяются
экспериментально для выделенного класса объектов и могут уточняться в процессе
наладки. Критерием останова итерационного процесса является выполнение
неравенств:
![]() ;
; ![]() ,
где n, m – число шагов адаптации.
,
где n, m – число шагов адаптации.
Где ![]() - значение времени интегрирования на m-ом шаге,
- значение времени интегрирования на m-ом шаге, ![]() -
значение времени интегрирования на m+1 –ом шаге,
-
значение времени интегрирования на m+1 –ом шаге, ![]() - весовые коэффициенты,
- весовые коэффициенты, ![]() - наперед заданные точности высилений.
- наперед заданные точности высилений.
Параметрическая оптимизация по заданному критерию
Предложеная стратегия решения, заключающаяся в нечёткой коррекции коэффициента передачи, в комбинации с поисковой оптимизацией интегрального критерия по времени интегрирования.
Математическая постановка задачи параметрической оптимизации имеет вид:
 ,
(15)
,
(15)
![]() ,
, ![]() .
(16)
.
(16)
Ограничения:
![]() ,
(17)
,
(17)
где y(t) – выход
объекта, ![]() - постоянная времени объекта,
- постоянная времени объекта, ![]() - коэффициент передачи объекта,
- коэффициент передачи объекта, ![]() - транспортное запаздывание объекта,
- транспортное запаздывание объекта, ![]() - управление,
- управление, ![]() ,-
сигнал рассогласования,
,-
сигнал рассогласования, ![]() и
и ![]() - параметры настройки регулятора,
- параметры настройки регулятора, ![]() - задание регулятору,
- задание регулятору, ![]() - динамическая ошибка.
- динамическая ошибка.
Вначале процесса коррекции производится определение нового значения
коэффициента усиления регулятора ![]() по формуле:
по формуле:
![]() ,
(17)
,
(17)
где ![]() - коэффициент коррекции, n – номер
шага коррекции
- коэффициент коррекции, n – номер
шага коррекции ![]() .
.
Нечёткая коррекция коэффициента усиления ![]() выполняется с использованием алгоритма
логического вывода Mamdani. Для этого диапазон возможного изменения динамической
ошибки
выполняется с использованием алгоритма
логического вывода Mamdani. Для этого диапазон возможного изменения динамической
ошибки ![]() (
(![]() ) разбит на три нечётких подмножества.
Для динамической ошибки
) разбит на три нечётких подмножества.
Для динамической ошибки ![]() выбраны функции
принадлежности треугольной формы. Формулы и графики этих функций приведены в
таблице 3 и на рис. 3 соответственно. Переменная
выбраны функции
принадлежности треугольной формы. Формулы и графики этих функций приведены в
таблице 3 и на рис. 3 соответственно. Переменная ![]() «малая»,
если она меньше, чем
«малая»,
если она меньше, чем ![]() , «средняя», если её значение
находится в диапазоне [
, «средняя», если её значение
находится в диапазоне [![]() ;
;![]() ],
«большая», если её значение находится в диапазоне [
],
«большая», если её значение находится в диапазоне [![]() ;
;![]() ].
].
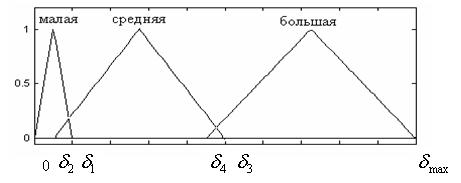
Рис. 3 Функции принадлежности динамической
ошибки ![]()
Таблица 3
Нечёткие подмножества
динамической ошибки ![]() .
.
|
Нечеткое подмножество |
Функции принадлежности |
|
Динамическая ошибка «малая» |
|
|
Динамическая ошибка «средняя» |
|
|
Динамическая ошибка «большая» |
|



Аналогично для коэффициента коррекции ![]() опеределён
диапазон возможного измененения (
опеределён
диапазон возможного измененения (![]() ) и определены
функции принадлежности. Формулы и графики этих функций приведены в таблице 4 и
на рис. 4 соответственно. Значение величины коэффициента коррекции
) и определены
функции принадлежности. Формулы и графики этих функций приведены в таблице 4 и
на рис. 4 соответственно. Значение величины коэффициента коррекции ![]() считается «малым» если оно находится в
диапазоне (0;
считается «малым» если оно находится в
диапазоне (0; ![]() ], «средним» если оно
находится в диапазоне [
], «средним» если оно
находится в диапазоне [![]() ;
;![]() ] и
«большим» - если его значение находится в диапазоне [
] и
«большим» - если его значение находится в диапазоне [![]() ;
;![]() ]. Для величины
]. Для величины ![]() также
были выбраны функции приадлежности треугольной формы.
также
были выбраны функции приадлежности треугольной формы.
Таблица 4
Нечёткие
подмножества коэффициента коррекции ![]() .
.
|
Нечеткое подмножество |
Функции принадлежности |
|
|
|
|
|
|
|
|
|



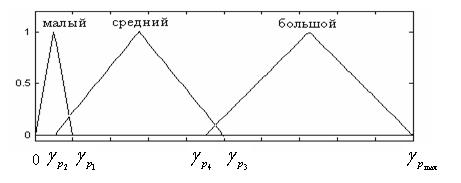
Рис. 4
Функции принадлежности коэффициента коррекции ![]() .
.
Для
выполнения нечёткого вывода сформулирован следующий набор правил, связывающий
динамическую ошибку ![]() и коэффициента коррекции
и коэффициента коррекции ![]() :
:
1.
Если ![]() «малая», то
«малая», то ![]() -«высокий»;
-«высокий»;
2.
Если ![]() «средняя», то
«средняя», то ![]() -«средний»;
-«средний»;
3.
Если ![]() «большая», то
«большая», то![]() -«малый».
-«малый».
После
выполнения коррекции коэффициента усиления ![]() производится
параметрическая оптимизация интегрального
критерия
производится
параметрическая оптимизация интегрального
критерия ![]() . Для решения этой задачи при
фиксированном
. Для решения этой задачи при
фиксированном ![]() , применяется метод координатного
спуска [2, 3].
, применяется метод координатного
спуска [2, 3].
Предложенный алгоритм представлен ниже.
Шаг
1. Ввод А, ![]() .
.
Шаг2.![]() = А,
= А, ![]() =0,
=0, ![]() .
.
Шаг3.![]() =
=![]() ,
, ![]() .
.
Шаг4.Вычисление
![]() при
при ![]() .
.
Шаг5.Если
![]() , то переход на шаг3, иначе переход на
шаг6.
, то переход на шаг3, иначе переход на
шаг6.
Шаг6.
![]() ,
,![]()
Шаг7.Вычисление
![]() при
при ![]() .
.
Шаг8.Если
![]() , то переход на шаг6, иначе переход на
шаг9.
, то переход на шаг6, иначе переход на
шаг9.
Шаг9.Если ![]() , то переход на
шаг10, иначе - завершение процесса оптимизации.
, то переход на
шаг10, иначе - завершение процесса оптимизации.
Шаг10.
![]() ,
, ![]() .
.
Шаг11. Переход на шаг3.
где h – величина
приращения времени интегрирования ![]() ,
, ![]() - заданное минимальное значение
приращения h,
- заданное минимальное значение
приращения h, ![]() - коэффициент коррекции
величины изменения h, А - заданное начальное значение величины приращения h,
- коэффициент коррекции
величины изменения h, А - заданное начальное значение величины приращения h, ![]() ,
, ![]() ,
, ![]() - счётчики итераций. Значение коэффициента
А выбирается согласно табл. 5.
- счётчики итераций. Значение коэффициента
А выбирается согласно табл. 5.
Таблица 5
Значение
А в зависимости от ![]() .
.
|
|
А |
|
0 |
1 |
|
10 |
10 |
|
100 |
100 |
Найденное значение ![]() , при котором
достигается минимум критерия
, при котором
достигается минимум критерия ![]() , используется для
опеределения нового начального значения коэффициента усиления регулятора
, используется для
опеределения нового начального значения коэффициента усиления регулятора ![]() для уточнения с помощью нечёткого
алгоритма коррекции. Далее аналогично описанным действиям производится
попеременная подстройка коэффициента усиления регулятора
для уточнения с помощью нечёткого
алгоритма коррекции. Далее аналогично описанным действиям производится
попеременная подстройка коэффициента усиления регулятора ![]() и времени интегирования
и времени интегирования ![]() до тех пор, пока в результате
поочередной коррекции значение времени интегрирования
до тех пор, пока в результате
поочередной коррекции значение времени интегрирования ![]() в
результате оптимизации не отличается от значения этого времени найденного на
предыдущем шаге оптимизации.
в
результате оптимизации не отличается от значения этого времени найденного на
предыдущем шаге оптимизации.
Внедрение предложенных алгоритмов
Часть
из разработанных алгоритмов получили своё внедрение в промышленных
АСУ ТП. В частности, однопараметрический алгоритм (1) с коррекцией по анализу начального
участка переходного процесса был внедрен в программном обеспечении контроллеров
компании “Раут-Автоматик” и используется для коррекции настроек ПИ закона
регулирования в системах кондиционирования и горячего водоснабжения. Для подтверждения
работы алгоритма приведем данные анализа адаптивной АСР калорифера системы
вентиляции Киевской городской больницы “Феофания”. В результате исследования объекта
регулирования было установлено, что коэффициент передачи ![]() и постоянная времени
и постоянная времени ![]() в зависимости от нагрузки может
изменяться на
в зависимости от нагрузки может
изменяться на ![]() 50%. Полученная передаточная
функция объекта регулирования имеет вид:
50%. Полученная передаточная
функция объекта регулирования имеет вид:
![]() .
(18)
.
(18)
Начальные
настройки адаптивного ПИ регулятора, обеспечивающие переходный процесс с 20% перерегулированием определены по
зависимостям (3): ![]() = 2,27,
= 2,27, ![]() = 48 сек.
= 48 сек.
После
введения в действие АСР контур адаптации скорректировал эти настройки. Для
этого понадобилось три шага адаптации коэффициента передачи, значения этих настроек
следующие: ![]() = 1,51,
= 1,51, ![]() =
48 сек. Проведя моделирование в Matlab6.5 при подаче возмущения по заданию, мы получили результаты
представленные на рис. 5.
=
48 сек. Проведя моделирование в Matlab6.5 при подаче возмущения по заданию, мы получили результаты
представленные на рис. 5.
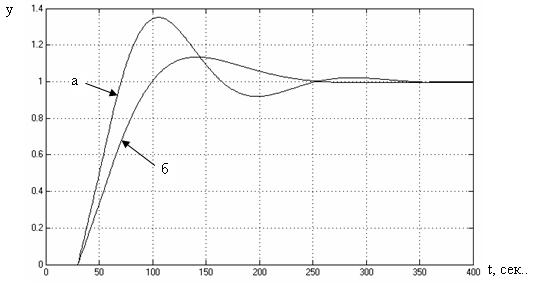
Рис. 5 Переходные процессы в замкнутой системе:
а – с начальными настройками регулятора; б – после трёх шагов адаптации.
Как видно на графике переходного процесса после адаптации рис.5.б, система регулирования обеспечивает процесс с 20% перерегулированием, что необходимо для оптимальной работы.
Выводы
1.
Предложены алгоритмы коррекции по анализу
начального участка с однопараметрической подстройкой, которые при изменении
параметров объекта на ![]() 50% позволяют получить
переходный процесс с 20% перерегулированием.
50% позволяют получить
переходный процесс с 20% перерегулированием.
2.
В случае, если параметры объекта изменяются больше,
чем на ![]() 50% следут использовать одну из
стратегий подстройки всех параметров регулятора: WAR-коррекция, нечёткая коррекция по анализу показателей качества
переходного процесса в комбинации с параметрической оптимизацией по заданному
критерию.
50% следут использовать одну из
стратегий подстройки всех параметров регулятора: WAR-коррекция, нечёткая коррекция по анализу показателей качества
переходного процесса в комбинации с параметрической оптимизацией по заданному
критерию.
3. Для начальной настройки системы рекомендуется использовать алгоритм идентификации в разомкнутом контуре. Разработано алгоритмическое обеспечение для реализации этих подходов в случае ПИ, ПИД алгоритмов.
The techniques for building the self-tuned regulators of power engineering quasi-stationary objects are proposed. It consists in tuning of the coefficients of PI, PID algorithms. The results of modeling are presented. The operability of self-tuned regulators within wide range of the object parameters change is shown.
1. Белов В.В. «Разработка и исследование методов и схем беспоисковой оптимизации АСР в теплоэнергетике на основе анализа ошибки регулирования»: автореферат диссертации на соискание ученой степени кандидата технических наук, Иваново 1984г.
2. Методы оптимизации в теории управления: Учебное пособие/ И.Г. Черноруцкий. – С-Пб. : Питер, 2004. – 256с.:ил.
3. «Улучшение удаления азота из дымовых газов на комбинированных электростанциях с помощью нечёткого WAR-регулятора» - Техника регулирования, обзор ABB 9/93.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.