УДК 621.311:681.5
МЕТОД ПОСТРОЕНИЯ САМОНАСТРАИВАЮЩИХСЯ РЕГУЛЯТОРОВ ДЛЯ ПРОМЫШЛЕННОГО ПРИМЕНЕНИЯ
Ковриго Ю.М., Мовчан А.П., Полищук И.А.
При разработке систем автоматического регулирования (САР) промышленными объектами в большинстве случаев применяют ПИ и ПИД алгоритмы.
Ввиду того, что большинство объектов являются нелинейными, обладают значительной априорной и текущей параметрической неопределённостью, возникает задача автоматизации настройки регуляторов как при вводе в действие, так и процессе их функционирования, тоесть задача построения самонастраивающихся регуляторов.
Среди большого количества самонастраивающихся систем автоматического регулирования (СНС АР) наиболее простыми в реализации являются системы, использующие информацию только о регулируемой координате и об оценке её производной.
Известно[1, 2], что для объекта выше первого порядка по времени ![]() достижения максимума первой
производной выходной величины у(t) в точке перегиба, а также по
модулю у(
достижения максимума первой
производной выходной величины у(t) в точке перегиба, а также по
модулю у(![]() ) и производной от у(
) и производной от у(![]() ) можно судить о статических и динамических
свойствах объекта. Для построения СНС АР используются результаты анализа
начального участка переходной характеристики разомкнутой АСР, получаемой путём
подачи ступенчатого управляющего воздействия. Однако предложенный способ
коррекции настроек не всегда применим, так как требует размыкания АСР при
подаче идентифицирующего воздействия.
) можно судить о статических и динамических
свойствах объекта. Для построения СНС АР используются результаты анализа
начального участка переходной характеристики разомкнутой АСР, получаемой путём
подачи ступенчатого управляющего воздействия. Однако предложенный способ
коррекции настроек не всегда применим, так как требует размыкания АСР при
подаче идентифицирующего воздействия.
В статье рассматривается метод построения СНС АР стабилизации в классе
типовых ПИ, ПИД законов регулирования, обеспечивающий при простоте технической
реализации создание высококачественных контуров управления квазистационарными
техническими объектами. Метод основан на коррекции общего коэффициента усиления
![]() по результатам анализа реакции
замкнутой АСР на ступенчатое изменение задания и коррекции времени
интегрирования
по результатам анализа реакции
замкнутой АСР на ступенчатое изменение задания и коррекции времени
интегрирования ![]() по оценкам прямых показателей
качества АСР.
по оценкам прямых показателей
качества АСР.
Экспериментально установлено наличие зависимости коэффициента передачи
регулятора от величины А(![]() ):
):
 ,
(1)
,
(1)
где ![]() ,
, ![]() - заданое значение
выходной величины. Рекомендуемый адаптивный ПИД закон регулирования
имеет следующий вид [3]:
- заданое значение
выходной величины. Рекомендуемый адаптивный ПИД закон регулирования
имеет следующий вид [3]:
![]() ,
(2)
,
(2)
![]() , (3)
, (3)
где n=0,1,2…
- номер шага коррекции коєффициента передачи (шага самонастройки),
а соотношение ![]() и времени дифференцирования
и времени дифференцирования ![]() постоянно. С помощью коэффициента
постоянно. С помощью коэффициента ![]() задаются показатели качества
регулирования. На рис.1 показаны переходные характеристки СНС АР объекта с
коэффициентом усиления
задаются показатели качества
регулирования. На рис.1 показаны переходные характеристки СНС АР объекта с
коэффициентом усиления ![]() , постоянной времени
Т=200сек, запаздыванием
, постоянной времени
Т=200сек, запаздыванием ![]() =50сек при начальных
настройках
=50сек при начальных
настройках ![]() в конце процесса самонастройки
(адаптации) при различных значениях
в конце процесса самонастройки
(адаптации) при различных значениях ![]() :
:
![]()
![]()
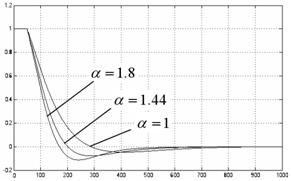
Рис.1.
Переходные характеристики при различных значениях ![]() .
.
Известно, что
при небольшом диапазоне изменения параметров объекта однопараметрическая
настройка регулятора в достаточной мере обеспечивает качество регулирования при
сохранении соотношения между отдельными составляющими в выражении (2). При
отклонении параметров объекта от базовых для достижения заданных показателей
качества достаточной является коррекция только ![]() .
.
![]() На
рис. 2 показаны переходные характеристики в АСР при настройке регулятора вышеупомянутого
объекта путём коррекции только
На
рис. 2 показаны переходные характеристики в АСР при настройке регулятора вышеупомянутого
объекта путём коррекции только ![]() при существенном
отличии
при существенном
отличии ![]() от требуемого значения и
от требуемого значения и ![]() близком к оптимальному. Переход
от
близком к оптимальному. Переход
от ![]() =1,9 к
=1,9 к ![]() = 1,1 осуществлён за три
шага адаптации, тоесть при n=3.
= 1,1 осуществлён за три
шага адаптации, тоесть при n=3.
![]()
Рис. 2. Переходные характеристки в замкнутой АСР
а - переходная характеристика при
б – переходная
характеристика при ![]()
В том случае,
когда постоянная времени объекта оценена с большой погрешностью и,
следовательно, ![]() значительно отличается
от оптимального значения, показатели качества переходного процесса после коррекции
значительно отличается
от оптимального значения, показатели качества переходного процесса после коррекции ![]() далеки от
требуемых. Предложена стратегия коррекции коррекции
далеки от
требуемых. Предложена стратегия коррекции коррекции ![]() , основанная на использовании
упорядоченных правил регулирования, которые действительны для выбранных
характеристик качества переходного процесса и подобно нечёткому регулятору
представляют базу знаний.
, основанная на использовании
упорядоченных правил регулирования, которые действительны для выбранных
характеристик качества переходного процесса и подобно нечёткому регулятору
представляют базу знаний.
Введём
переменные ![]() :
:
![]() (4)
(4)
 (5)
(5)
![]() ,
(6)
,
(6)
где ![]() - значение выходной величны в момент
- значение выходной величны в момент ![]() от начала
переходного процесса. Время
от начала
переходного процесса. Время ![]() выбирается для
определённого класса объектов по априорным данным. Значение
выбирается для
определённого класса объектов по априорным данным. Значение ![]() влияет только на скорость нахождения
оптимальных настроек и не определяет результирующие качественные показатели АСР.
влияет только на скорость нахождения
оптимальных настроек и не определяет результирующие качественные показатели АСР.
Правила, описывающие стратегию коррекции, имеют вид:
если ![]() , то
, то ![]() ,
(7)
,
(7)
если
![]() , то
, то ![]() , (8)
, (8)
где m – номер шага коррекции ![]() .
.
Величины ![]() определяются экспериментально для
выделенного класса объектов и могут уточняться в процессе наладки. Критерием
останова итерационного процесса является выполнение неравенств:
определяются экспериментально для
выделенного класса объектов и могут уточняться в процессе наладки. Критерием
останова итерационного процесса является выполнение неравенств:
![]() ;
; ![]() ,
где n, m – число шагов адаптации,
,
где n, m – число шагов адаптации,
![]() - значение времени интегрирования на m-ом шаге,
- значение времени интегрирования на m-ом шаге,![]() - весовые
коэффициенты. Экспериментально определённые рекомендации для нахождения величин
- весовые
коэффициенты. Экспериментально определённые рекомендации для нахождения величин
![]() представлены в таблицах 1 и 2.
представлены в таблицах 1 и 2.
Таблица 1.
Значения
величины ![]() в зависимости от
диапазона изменения величины
в зависимости от
диапазона изменения величины ![]()
|
|
[0..50] |
[50..150] |
> 150 |
|
|
50 |
500 |
1000 |
Таблица 2.
Значения величины ![]() в зависимости от дипазона изменения
величин
в зависимости от дипазона изменения
величин ![]() и
и ![]() .
.
|
|
[0..50] |
[50..150] |
> 150 |
|
[0..0.02] |
0 |
0 |
0 |
|
[0.02..0.2] |
100 |
200 |
500 |
|
> 0.2 |
200 |
500 |
1000 |

Начальные
значения ![]() приближенно определяются по априорным
данным, величины
приближенно определяются по априорным
данным, величины ![]() находятся в приделах
находятся в приделах ![]() и
устанавливаются в процессе отладки.
и
устанавливаются в процессе отладки.
При построении
СНС с коррекцией ![]() с помощью упорядоченных
правил могут использоваться и другие прямые показатели качества, а также их
лингвистические описания, что позволяет формулировать другие законы коррекции.
с помощью упорядоченных
правил могут использоваться и другие прямые показатели качества, а также их
лингвистические описания, что позволяет формулировать другие законы коррекции.
На рис. 3 представлена структурная схема СНС АР объектом первого порядка с запаздыванием, разработанной с использованием предлагаемого подхода:
 |
Рис. 3. Структурная схема АСР с адаптивным регулятором.
Анализатор1 производит определение максимума модуля производной ошибки, время достижения этого максимума и значения модуля ошибки в этот момент.
Анализатор2
производит определение величин![]() , по значениям
которых определяются согласно информации, приведенной в таблицах 1, 2, величины
, по значениям
которых определяются согласно информации, приведенной в таблицах 1, 2, величины
![]()
![]() .
Коррекция времени интегрирования производится согласно правил коррекции (7),
(8), подстройка коэффициента передачи по формуле (3).
.
Коррекция времени интегрирования производится согласно правил коррекции (7),
(8), подстройка коэффициента передачи по формуле (3).
Фильтр с
передаточной функцией ![]() вводится для обеспечения
гарантированного значения порядка анализируемого объекта выше первого, а также
фильтрации анализируемого сигнала от помех.
вводится для обеспечения
гарантированного значения порядка анализируемого объекта выше первого, а также
фильтрации анализируемого сигнала от помех.
На примере
объекта с Т=200 сек, ![]() =50 сек и
=50 сек и ![]() =1 покажем преимущество
=1 покажем преимущество
СНС АР с
коррекцией ![]() и
и ![]() .
.
Пусть
переходный процесс должен удовлетворять требованию, чтобы динамическая ошибка ![]() была меньше 2%.
была меньше 2%.
Работа рассматриваемой СНС АР может быть проиллюстрирована переходными процессами на каждом шаге самонастройки.
Кривая а
соответствует начальным настройкам регулятора ![]() 3,
3, ![]() . Кривая
б соответствует настройкам после первого шага коррекции
. Кривая
б соответствует настройкам после первого шага коррекции
![]() , при этом
, при этом ![]() ,
, ![]() . После выполненного шага
критерий останова по
. После выполненного шага
критерий останова по ![]() больше заданного
больше заданного ![]() =0.1, поэтому выполняем ещё один шаг
адаптации
=0.1, поэтому выполняем ещё один шаг
адаптации ![]() . Кривая в соответствует настройкам
после второго шага коррекции
. Кривая в соответствует настройкам
после второго шага коррекции ![]() , при этом
, при этом ![]() ,
, ![]() . После второго шага коррекции
. После второго шага коррекции ![]() критерий останова становится меньше
заданного, поэтому далее выполняется коррекция
критерий останова становится меньше
заданного, поэтому далее выполняется коррекция ![]() при
при
![]() . Кривая г соответствует
настройкам после выполнения коррекции
. Кривая г соответствует
настройкам после выполнения коррекции ![]() ,
при этом
,
при этом ![]() ,
, ![]() . Далее снова выполняем коррекцию
. Далее снова выполняем коррекцию ![]() , так как критерий останова не
выполняется. Кривая д – переходный процесс после третьего шага коррекции
, так как критерий останова не
выполняется. Кривая д – переходный процесс после третьего шага коррекции
![]() , при этом
, при этом ![]() ,
, ![]() . Таким образом мы получаем
величины параметров
. Таким образом мы получаем
величины параметров ![]() и
и ![]() ,
при которых критерии останова меньше заданных значений и процесс самонастройки
прекращается.
,
при которых критерии останова меньше заданных значений и процесс самонастройки
прекращается.
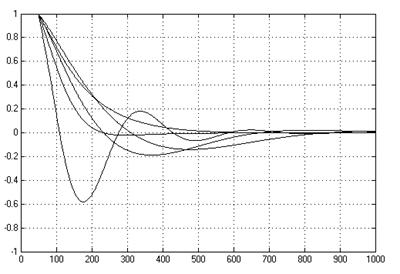
Рис.4 Переходные характеристики в замкнутой АСР.
|
Основные результаты и выводы.
1. Предложен
метод построения СНС АР, основанный на коррекции величины ![]() по информации, полученной путём
анализа начального участка переходного процесса в замкнутой АСР при подаче
ступенчатого идентифицирующего сигнала по выходной величине объекта и изменении
величины
по информации, полученной путём
анализа начального участка переходного процесса в замкнутой АСР при подаче
ступенчатого идентифицирующего сигнала по выходной величине объекта и изменении
величины ![]() с помощью упорядоченных правил на
основе введеных в рассмотрение величин, косвенно характеризующих качество
переходного процесса. Установлено, что постоянный коэффициент
с помощью упорядоченных правил на
основе введеных в рассмотрение величин, косвенно характеризующих качество
переходного процесса. Установлено, что постоянный коэффициент ![]() в алгоритме коррекции коэффициента
передачи регулятора определяет конечные показатели качества регулирования при
однопараметрической настройке. При коррекции только величины
в алгоритме коррекции коэффициента
передачи регулятора определяет конечные показатели качества регулирования при
однопараметрической настройке. При коррекции только величины ![]() для достижения динамической ошибки
меньше двух процентов рекомендовано выбирать
для достижения динамической ошибки
меньше двух процентов рекомендовано выбирать ![]() . 2.
Предложенный метод построения СНС АР обеспечивает эффективную работу при
изменении параметров объекта в диапазоне:
. 2.
Предложенный метод построения СНС АР обеспечивает эффективную работу при
изменении параметров объекта в диапазоне: ![]() ,
коэффициент усиления объекта может изменяться в 20 раз. Процесс самонастройки
заканчивается за
,
коэффициент усиления объекта может изменяться в 20 раз. Процесс самонастройки
заканчивается за ![]() итераций в зависимости от
начальных значений параметров настройки регулятора.
итераций в зависимости от
начальных значений параметров настройки регулятора.
The technique for building the self-tuned regulators of industrial quasi-stationary objects is proposed. It consists in tuning of the total amplification coefficient for closed automatic regulation system with respect to its error absolute value and derivative as well as correction of the integration constant with the use of the estimation of direct quality factors. The results of modeling are presented. The operability of self-tuned regulator within wide range of the object parameters change is shown.
1. Шубладзе А.М., Уланов А.Г., Ткачев В.П., Гулзев В.С., Ланченко Н.П. Адаптивные промышленные регуляторы // Приборы и системы управления. - 1981. - №7.-С.15-16.
2. Загарий Г.И., Шубладзе А.М. Синтез систем управления на основе критерия максимальной степени устойчивости // Энергоатомиздат. -1988. -104с.
3. Полищук И.А., Ковриго Ю.М., Мовчан А.П. Адаптивный регулятор с идентификацией в замкнутом контуре // Энергетика: экономика, технологии, экология. – 2004. - №2. - С. 16-22.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.