УДК 681.322.06
ИНТЕГРАЦИЯ МЕТОДОВ ПРИ СИНТЕЗЕ СЛОЖНЫХ СИСТЕМ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Митрахович М.М.
Введение. В последнее время в отечественной и зарубежной литературе наиболее существенное внимание уделяется методам и способам построения сложных систем, к которым относится, например, вооружение и военная техника (ВВТ) [1-3].
Объективная необходимость применения такой методологии связана с увеличением количества решаемых вооружением задач; разнообразием аппаратуры, применяемой для их решения; увеличением объема обрабатываемой информации и скорости ее обработки. Управление сложным объектом в реальных условиях связано не только со сложностью математического, программного, информационного и технического обеспечения, но и недостаточностью информации необходимой для управления и принятия управленческих решений. Следовательно, проектирование сложных систем в условиях неопределенности относительно входной информации является актуальной задачей.
Традиционно при конструировании сложных систем в условиях неопределенности используют вероятностные подходы, в соответствии с которыми неопределенность описывается некоторой мерой, характеризующей возможность проявления наперед заданных исходов. Эти методы излагаются в известной литературе [3, 4].
Для получения удовлетворительных характеристик систем управления в последнее время появился целый ряд методов, основанных на принципах структурной и параметрической адаптации управляющих устройств [4-7]. Эти методы развиваются в рамках прямых или непрямых подходов к задаче синтеза алгоритмов адаптации систем. В тоже время известность приобретают и методы, в которых предпочтение отдается достоверности получаемых результатов в условиях неопределенности, другими словами, получению гарантированного результата [1]. Вопрос применения этих методов в задачах синтеза сложных систем не считается изученным полностью.
В статье предлагается сравнительный анализ различных методов, основанных на принципах нечеткой логики, адаптации и обучения, используемых для построения сложных систем, и исследование возможности их интеграции.
Постановка задачи. Как известно, возможность точного математического описания сложной системы отсутствует [1, 3, 4]. Классический подход к синтезу сложной системы, предполагающей иерархическое построение, состоит в разбиении большой системы на более мелкие компоненты: уровни, подсистемы, блоки и т.д., к которым далее применяются известные методы проектирования [2]. Поэтому сложную систему, как это обычно делают при проектировании вооружения и военной техники, разбивают на подсистемы, каждую из которых представляют соотношением [5]
![]() , (1)
, (1)
где X={x1,…, xn} – множество элементов xi системы, а R обозначает закономерности поведения системы, включающие правила действия с элементами xi, взаимосвязи между различными xi, соотношения между Х и внешней средой, ограничения и управления.
Для реализации сложной системы необходимо также знать выходную величину системы – выходной вектор YТ=(y1, …, ym), алгоритм нахождения которого обычно составляется в терминах ²вход-выход². При заданных множествах X, R, этот алгоритм представляет отображение
![]() , (2)
, (2)
где ui – управляющее воздействие в подсистеме. Наиболее типовая ситуация управления, когда R известно лишь приближенно. Тогда результаты наблюдения за X и Y могут быть использованы для коррекции алгоритма управления, в части множества R.
В практике построения систем управления сложными объектами получила широкое распространение триада критериев: эффективность-стоимость-время (Э-S-T). Кроме того, следует отметить, что в вооружении и военной технике более предпочтительным является задача, когда главным критерием используется стоимость, а два других выступают в качестве ограничений [3]
 (3)
(3)
В качестве показателей эффективности для систем управления обычно выбирается точность воспроизведения задания.
Задача синтеза системы управления сложной системы состоит в том, чтобы построить такой алгоритм управления, который обеспечивает достижение целей (3) сложной системой (1) c закономерностями (2).
Методы решения. В соответствии с принятой моделью сложная система включает в себя источник информации, систему управления, орган управления и принятия решений, управляемый объект, среду, оказывающую воздействие на объект управления. Орган управления вынужден действовать в условиях неопределенности, вызванной главным образом недостатком опыта и знания факторов, влияющих на процесс принятия решений, кроме того, в сложных системах присутствуют временные или же пространственные ограничения при принятии решений. Существующие подходы к синтезу систем в условиях неполной информации опираются на методы нечеткой логики, методы адаптации, методы обучения.
Методы нечеткой логики. В системах с нечеткой логикой по информации, выраженной в лингвистической форме, ставится задача формирования управляющего воздействия на объект управления. Текущая информация ya, yi (рис. 1) о функционировании системы с помощью процедуры фаззификации преобразуется в лингвистические величины вида отрицательная, положительная, большая, средняя, малая для формирования лингвистической переменной, например, ошибка. В нечетком вычислительном устройстве (контроллере) с помощью базы правил ЕСЛИ-ТО осуществляется формирование логического решения. На основании полученного логического решения процедурой дефаззификации получается единственное численное значение управляющего воздействия U на выходе контроллера. Структура системы управления при управлении по принципу нечеткого вывода показана на рис. 1.
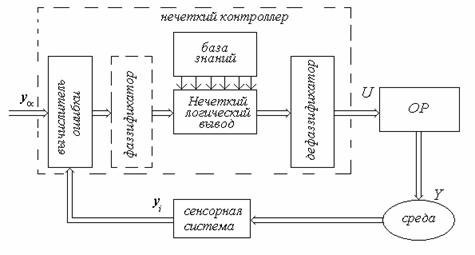
Рис. 1 Структура системы управления с нечеткой логикой
Сложность построения системы с нечеткой логикой заключается в эвристичности алгоритмов фаззификации и дефаззификации. Эту сложность избежать возможно, если в распоряжении конструктора имеется достаточно адекватная функция принадлежности или модель системы. В последнем случае настройка системы управления значительно упрощается, в противном случае он оказывается довольно сложным. Различные варианты алгоритмов фаззификации и дефаззификации представлены в [7]. Кроме того, дополнительную трудность работе контроллера создают помехи и внешние возмущения, вопросы парирования которых не являются изученными до конца [6, 7].
Методы адаптации. Структура типовой адаптивной системы стабилизации объекта в условиях неизмеряемых возмущений xt c использованием для целей управления точечных оценок ct показана на рис. 2.
Адаптивная система управления построена по иерархическому принципу, в соответствии с которым система управления имеет два уровня. На верхнем уровне расположено устройство, реализующее непосредственно алгоритм адаптивного управления А (адаптер), изменяющее вектор настроечных параметров ct управляющего устройства УУ, расположенного на нижнем уровне.
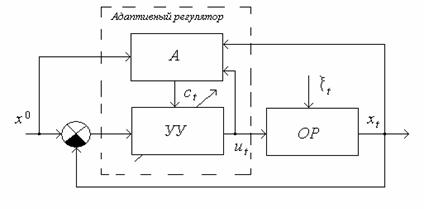
Рис. 2 Структура адаптивной системы управления
Управляющее устройство реализовано по принципу обратной связи, формирует управляющие воздействия ut так, чтобы компенсировать текущие ошибки системы. Алгоритм нижнего уровня выражен в виде операторного уравнения
![]() , (4)
, (4)
где q=x0-xt – значение текущей ошибки системы. Уравнение (4) называют алгоритмом (законом) управления. Алгоритм верхнего уровня, который в символьной форме может быть представлен так:
![]() , (5)
, (5)
называют алгоритмом (законом) адаптации. Для реализации закона адаптивного управления требуется информация о задающем воздействии, текущем значении управляющего воздействия, формируемого на основании предыдущих значений вектора параметров, и реакция объекта на эти воздействия.
Уравнения (4), (5) определяют алгоритм адаптивного управления. Объект совместно с управляющим устройством образуют основной контур регулятора, а цепь обратной связи, включающая адаптер, образует контур адаптации. Исходя из требований практической реализуемости, для формирования управления ut и определения вектора подстраиваемых параметров ct обычно используют конечную часть предыстории процесса настройки параметров.
Методы обучения. Современные методы обучения опираются на алгоритмы обучения распознаванию образов, при этом систему управления конструируют по принципу организации нейронной сети, которая в техническом исполнении представляет нейрокомпьютер. Работы, проводимые в США, Финляндии и других странах по использованию нейрокомпьютеров для управления химическими и ядерными реакторами, для выполнения точного маневра истребителя, управления роботом (прямая, обратная кинематическая и динамическая задачи, планирование маршрута движения робота [7]), подчеркивают актуальность такой организации системы управления.
Структура системы c нейрокомпьютером показана на рис. 3. В нейрокомпьютере НК “учебные” векторы xn подвергаются весовой обработке, в результате которой формируется управляющее воздействие u, поступающее на объект управления ОР. Начальные значения весов wn задаются произвольным образом, в дальнейшем их подстройка производится механизмом адаптации МА. Реакция динамического объекта y, сформированная под влиянием u, сравнивается с правильным откликом d. Если вектор y не совпадает с d, то вычисляется ошибка е=d-y, используемая для подстройки весов НК в соответствии с алгоритмом, например, Розенблатта [7]:
![]() , (6)
, (6)
где k - номер итерации, i - номер входа нейроконтроллера, m - коэффициент скорости обучения (обычно m<1), реализуемого механизмом МНВ. После этого процедура повторяется до тех пор, пока выходной вектор не станет достаточно близким к эталонному d.
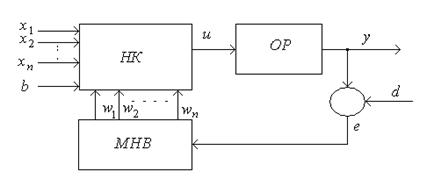
Рис. 3 Структура нейрокомпьютера с адаптивной настройкой
Опыт применения нейрокомпьютеров показывает, что несмотря на определенные преимущества нейронных сетей в отдельных случаях по сравнению с традиционными вычислениями, существующие нейросети не являются совершенными решениями. В процессе обучения ИНС присутствуют наибольшие ошибки системы управления. Кроме того, может оказаться так, что большие значения весовых коэффициентов могут сместить рабочую точку регулировочной характеристики в область насыщения, при малых изменениях весов сеть перестает обучаться.
При применении алгоритмов градиентного спуска в качестве настройки возможно попадание в область локального, а не глобального минимума функции ошибки обучения. Чтобы алгоритм сходился, приращения весов, а, следовательно, и скорость обучения должны быть малы, но тогда сеть будет обучаться долго по времени. Чрезмерно большая скорость обучения приводит к неустойчивости процесса. Таким образом, задача настройки сети представляет определенную сложность для конструктора.
Сравнительная характеристика. Приведем некоторые результаты построения сложных систем управления рассмотренными методами.
В отличие от классической теории управления, где закон управления, выражает некую математическую зависимость управляющей переменной от входной, в нечетком регуляторе закон управления представляется набором правил логического выбора вида ЕСЛИ-ТО в зависимости от значений лингвистической переменной, принадлежность которой к некоторому лингвистическому терму (множеству) устанавливается так называемой функцией принадлежности. Функционально необходимыми элементами нечетких регуляторов являются: база правил, блок формирования логического решения, блоки фазификации и дефазификации. Строгих рекомендаций по выбору алгоритмов фазификации и дефазификации нет и следствием этого является грубость получаемой системы управления. Таким образом, самостоятельное использование нечеткого регулятора приводит к построению системы управления с низким качеством управления.
Более точным по отношению к нечеткому вычислительному устройству является настроенная нейронная сеть. Однако она требует дополнительных временных затрат на обучение в отличие от системы управления, основанной на нечеткой логике.
Проведем аналогию между рассмотренными системами управления. Исходными данными для всех случаев построения являются фазовые координаты системы (например, ошибка и ее производные). В качестве выходной информации при нечетком выводе информации и нейросетевом подходе к реализации системы управления используется один и тот сигнал – управляющее воздействие на объект управления. Результатом функционирования адаптивной системы является параметры системы управления, которые могут быть использованы только нейросетевой системой управления. Недостатком адаптивных систем является наличие затрат времени на адаптацию системы, которое в свою очередь является платой за незнание параметров системы. Для получения высокого качества в системе ошибочное функционирование системы на период настройки системы управления должно быть каким-либо образом скомпенсировано. Значит, самостоятельное использование адаптивной системы как и нейросети нежелательно с точки зрения временных характеристик системы. Целесообразно их совместное использование, где адаптивная система управления выполняет роль своеобразного механизма настройки нейросети.
Таким образом, для повышения эффективности функционирования системы управления сложным объектом целесообразно объединить методы, основанные на принципах нечеткого вывода информации и нейросетевом принципе, использующем адаптивные методы настройки сети. Этому способствует наличие одинаковой входной и выходной информации при обоих подходах.
Интеграция методов. Предлагается система управления сложным объектом, построенная по двухуровневому принципу, при котором нижнему уровню отводится непосредственное формирование управление объектом (рис. 4). На нижнем уровне находятся нечеткий контроллер НчК и нейрокомпьютер НК. Окончательный выбор управления системой выполняется системой выбора управления СВУ, осуществляющей выбор управления по величине сигнала ошибки, поступающего с вычислителя ошибки ВО. Предполагается, что в виду грубости системы, т.е. когда ошибки находятся в диапазон I, рис. 5, то в системе управление выполняется НчК. Одновременно с этим управлением осуществляется настройка нейрокомпьютера с привлечением адаптивных методов. При достижении ошибок диапазона II система выбора управления СВУ переключает на управление от вычислительного устройства на нейросетевом принципе. Предполагается, что времени для настройки нейрокомпьютеру в этом случае достаточно.
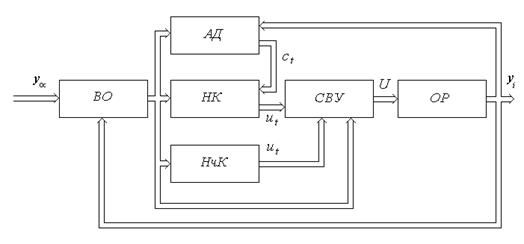
Рис. 4. Структура интегральной системы управления
Рис.5 Диапазоны работы систем управления
Представляется, что структура системы управления, представленная на рис. 4, будет иметь лучшие показатели эффективности, а именно продолжительность и точность отработки заданий, за счет комплексного использования методов. Ее реализация приведет к сокращению материальных затрат на разработку каждого отдельного устройства с требуемыми показателями эффективности и, кроме того, позволит получить прирост эффективности функционирования системы в целом.
Заключение. Представленные методы проектирования являются основным инструментом современных инженеров, занимающихся конструированием сложных технических систем в условиях априорной неопределенности. Эффективность их применения определяется навыками инженерного персонала и опытом проведения разработок. Наибольшего эффекта следует ожидать в комплексном подходе (интеграции) при рациональном использовании рассмотренных методов с ориентацией на возможность построения самоорганизующихся структур, что позволит рассчитывать на получение так называемого системного эффекта.
The features of synthesis of large systems in conditions a priori of uncertainty systems on the basis of three approaches, namely on a fuzzy system, neuron net and adaptive system are considered. The scheme of integration this system which will allow raising such parameters of a whole system effectiveness of management, as accuracy and duration of process of management, is offered.
1. Мітрахович М.М. Складні технічні системи. Системне математичне забезпечення проектних рішень / Мітрахович М.М. – К.: НАНУ, ІПММіС. – Київ: ²Нічлава², 1998. – 184 с.
2. Михалевич В.С. Об одном подходе к исследованию процесса управления уровнями вооружений / В.С. Михалевич, В.М. Кунцевич – Киев, 1989. – 26 с. (Препр. / АН УССР. Ин-т кибернетики им. В.М. Глушкова; 89-19).
3. Воронин А.Н. Сложные технические и эргатические системы: методы исследования / А.Н. Воронин, Ю.К. Зиатдинов, А.В. Харченко – Харьков: Факт, 1997. – 240 с.
4. Растригин Л.А. Адаптация сложных систем / Растригин Л.А. – Рига: Зинатне, 1981. – 375 с.
5. Цвиркун А.Д. Основы синтеза структуры сложных систем / Цвиркун А.Д. – М.: Наука, 1982. – 200 с.
6. Гостев В.И. Нечеткие регуляторы в системах автоматического управления / Гостев В.И. – К.: Радiоаматор, 2008. – 972 с.
7. Применение методов искусственного интеллекта в управлении проектами / Под ред. Соколова А.Ю. – Х.: НАУ им. Н.Е. Жуковского ²ХАИ², 2002. – 474 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.