УДК 681.51
АЛГОРИТМ АДАПТИВНОГО ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ ДИНАМИЧЕСКОЙ СИСТЕМОЙ С ЭЛЕМЕНТОМ ДИФФЕРЕНЦИРОВАНИЯ
Кучеров Д.П., Василенко А.В., Иванов Б.П.
Введение. Синтез систем терминального управления является актуальной задачей современных исследований теории управления динамическими системами. Решить задачу терминального управления – значит построить регулятор, который переводил бы объект управления в требуемое состояние за конечный (желательно минимальный) интервал времени. К этим задачам относятся – задача управления точечной сваркой, складированием, раскройкой материалов, схватом робота. Основными требованиями к качеству управления перечисленными процессами считаются непрерывность движения объекта, отсутствие автоколебаний и перерегулирования.
Известные методы синтеза систем терминального управления [1] предполагают наличие полной априорной информации о параметрах объекта в распоряжении конструктора. Управляющая функция, используемая в таких системах, представляет наибольшее положительное или отрицательное значение сигнала управления. В отсутствии априорной информации о параметрах объекта управления момент переключения сигнала управления строго не определен, при этом цель управления может оказаться не достигнутой. В таком случае разумно использовать адаптивный подход.
В работах [2-4] рассматривалась аналогичная задача в адаптивной постановке, когда в структуре динамической системы, которой осуществляется управление, отсутствуют элементы, которые вносят опережение по фазе в сигнал управления (дифференцирующие звенья). Особенность управления движением этих систем заключается в непрерывном изменении фазовых координат при скачкообразном изменении сигнала управления. Для повышения скорости отработки задания в состав управляемого привода включают элементы дифференцирования. Дифференцирование разрывной функции, какой является сигнал управления, в моменты переключения приводит к скачкообразному изменению некоторых координат объекта. В задачах адаптивного управления при этом возникает проблема выбора точки, по которой необходимо делать коррекцию вектора неизвестных параметров.
Аналогичная задача в неадаптивной постановке рассмотрена в [5], где предложен алгоритм финитного управления в классе линейных систем с переменной структурой и дифференцирующими свойствами. Для исключения скачкообразного изменения фазовых координат в моменты переключения в [5] предлагается строить управление в новом координатном пространстве с непрерывными компонентами.
В статье предлагается алгоритм адаптивного терминального управления с минимальным временем процесса управления, основанный на результатах работ [2-5], для построения алгоритма управления динамической системой, в составе которой имеется элемент дифференцирования. Приводится пример моделирования системы.
Постановка задачи. Пусть имеется динамическая система, выходная величина которой является решением дифференциального уравнения вида
![]() . (1)
. (1)
Здесь y(t) – выходная величина динамической системы; u(t) - входная величина (управляющее воздействие); T – коэффициент, параметр системы; a – параметр элемента дифференцирования. Считается, что параметры a, T априори неизвестны. Известно только, что параметры a, T – могут находиться в пределах
![]()
![]() . (2)
. (2)
Динамическая система (1) имеет передаточную функцию с двумя нулевыми полюсами и одним нулем. Структура такой системы представлена на рис.1. На рисунке введен коэффициент k=T -1.
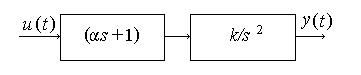
Рис. 1 Структурная схема динамического объекта
Необходимость обеспечения минимального времени процесса управления требует применения регулятора, способного реализовать такой процесс. В соответствии с [1] такой регулятор должен обеспечить выбор управляющего воздействия одного из двух возможных значений, т.е. u(t)Î{-U, +U}.
Как и в [2-4] представим уравнение (1) системой дифференциальных уравнений первого порядка. Введем обозначения: y1(t) - выходная величина динамической системы, y2(t) – производная выходной величины. Тогда уравнение (1) можно записать в виде
 (3)
(3)
Для системы (3) задано начальное состояние Y T(0)=(y1(0), y2(0)), Y T(0)ÎV\WÌÂ2, конечное состояние – окрестность начала координат W.
Задача состоит в построении терминального управления, обеспечивающего перемещение вектора Y(t) динамического объекта (1) за n-испытаний из любого начального состояния Y(0)ÎVÌÂ2 в некоторую область WÌÂ2, при котором будет обеспечиваться минимальное время Tn³T 0 в условиях априорной неопределенности относительно значений k, T, выраженной в форме (2). Предполагается, что возмущения в каналах измерения фазовых координат y1(t), y2(t) отсутствуют. Область W должна быть по возможности малой.
Неадаптивное управление. В соответствии с представлениями, развиваемыми в [2-4], смена знака управления производится в момент пересечения фазовой траекторией объекта линии переключения. Согласно (3) линию переключения на плоскости фазовых переменных y1, y2 можно представить выражением
 (4)
(4)
Здесь с – вектор с компонентами ![]() ,
, ![]() ,
, ![]() . На плоскости y1, y2 – кривая переключения f(y, c) представляет две примыкающие к оси y2 ветви парабол, не имеющие общей точки на y2. Из (3) следует, что если в некоторый момент времени t фазовая координата y1(t)=0, то фазовая координата y2(t)=-kTu(t). Следовательно, в фазовом пространстве y1, y2 при неизвестных параметрах k, T конечного положения yк=(0, 0) достичь принципиально невозможно.
. На плоскости y1, y2 – кривая переключения f(y, c) представляет две примыкающие к оси y2 ветви парабол, не имеющие общей точки на y2. Из (3) следует, что если в некоторый момент времени t фазовая координата y1(t)=0, то фазовая координата y2(t)=-kTu(t). Следовательно, в фазовом пространстве y1, y2 при неизвестных параметрах k, T конечного положения yк=(0, 0) достичь принципиально невозможно.
Интересно, что конечному состоянию
 (5)
(5)
зависящему от неизвестных параметров k, T, при решении задачи терминального управления в пространстве (y1, y2) соответствует начало координат (0, 0) в пространстве (y1, ![]() ). Таким образом, в данном случае в качестве вектора принятия решения о качестве процесса адаптации имеет смысл отказаться от вектора (у1, у2) и выбрать вектор Y T= (y1,
). Таким образом, в данном случае в качестве вектора принятия решения о качестве процесса адаптации имеет смысл отказаться от вектора (у1, у2) и выбрать вектор Y T= (y1, ![]() ). В (5) T 0 – наименьшее время перехода объекта из начального состояния
). В (5) T 0 – наименьшее время перехода объекта из начального состояния
Y T(0)ÎV¢=![]() в конечное Y T=(0, 0).
в конечное Y T=(0, 0).
Применив к разделяющей функции (4) линейное преобразование вида F(w, c)=lf(y, c), l>0, ее удобно представить в форме
 (6)
(6)
где ![]() =(-y1, y22, y2, 1),
=(-y1, y22, y2, 1), ![]() =(-y1, -y22, y2, -1),
=(-y1, -y22, y2, -1), ![]() =(l, lc1, lc2, lc3).
=(l, lc1, lc2, lc3).
Предположим далее, что каким-либо образом оценка ![]() =(l, l(c1+a), l(c2+b, l(c3+g)) неизвестного вектора с получена. Здесь {a, b, g}ÎÂ - элементы некоторой его d-окрестности. Тогда закон управления
=(l, l(c1+a), l(c2+b, l(c3+g)) неизвестного вектора с получена. Здесь {a, b, g}ÎÂ - элементы некоторой его d-окрестности. Тогда закон управления
 (7а)
(7а)
 (7б)
(7б)
обеспечивает перевод объекта (1) из любого начального состояния Y(0)ÎV\W в область W с числом интервалов управления не более двух за время Т 0+D при ![]() ÎС(с, d), где С(×,×) - d-окрестность вектора с.
ÎС(с, d), где С(×,×) - d-окрестность вектора с.
В соответствии с [2-4], замкнутую систему (2), (7), (6) будем называть системой терминального управления с минимальным временем переходного процесса.
Адаптивное управление. Пусть теперь вектор ![]() неизвестен. В этом случае закон управления будем строить по схеме (7) с учетом (6), заменяя в соответствующих выражениях неизвестный вектор
неизвестен. В этом случае закон управления будем строить по схеме (7) с учетом (6), заменяя в соответствующих выражениях неизвестный вектор ![]() на подходящую его оценку
на подходящую его оценку ![]() , определяемую на каждом (n-1)-м цикле перемещения вектора Y(t) из начального Y(0) в конечное положение.
, определяемую на каждом (n-1)-м цикле перемещения вектора Y(t) из начального Y(0) в конечное положение.
В качестве алгоритма адаптации воспользуемся алгоритмом, предложенным в [2]. Реализация этого алгоритма предусматривает запоминание координаты точки y(tn) пересечения в первый раз траектории движения с разделяющей поверхностью Fn(w, ![]() )=0. Обозначим l(tn) - общее число переключений к текущему моменту tn времени, начиная с момента t=0. Тогда алгоритм адаптации строится в форме следующей рекуррентной процедуры:
)=0. Обозначим l(tn) - общее число переключений к текущему моменту tn времени, начиная с момента t=0. Тогда алгоритм адаптации строится в форме следующей рекуррентной процедуры:
 (8)
(8)
В алгоритме (8) вектор w(tn) выбирается равным
 (9)
(9)
PrX{×} – обозначает операцию проектирования вектора ![]() в область
в область ![]() . Проектирование считается правильным, если выполнены соотношения
. Проектирование считается правильным, если выполнены соотношения
![]() ,
, ![]() . (10)
. (10)
Процедура (8)-(10) определяет алгоритм адаптации полностью (после задания начального вектора ![]() с учетом (10)). Как видно из (8)-(10), для построения этого алгоритма снова понадобилось использование априорной информации о нижних границах компонент вектора с, определяемых (2).
с учетом (10)). Как видно из (8)-(10), для построения этого алгоритма снова понадобилось использование априорной информации о нижних границах компонент вектора с, определяемых (2).
Сформулированный результат дает строгое обоснование возможности достижения цели адаптации за конечное число испытаний, т.е. построение регулятора, обеспечивающего терминальное управление с минимальным временем переходного процесса.
Моделирование. Эффективность предлагаемого алгоритма оценивалась моделированием объекта (1) с параметрами k=1 c-2, T=0,5 c. Результаты моделирования для начального состояния yT(0)=(-5,0, 0) представлены на рис.2, 3.
На рис.2 показаны функции y1(t), y2(t) на первом цикле адаптации с начальным ![]() =(2,0, 6,0, 2,45, 0,25), выбранным произвольно. Из рис.2 видно, что объект в скользящем режиме подходит к области W, процесс затянут во времени, точка Y(t) не попадает в W из-за автоколебаний в ее окрестности.
=(2,0, 6,0, 2,45, 0,25), выбранным произвольно. Из рис.2 видно, что объект в скользящем режиме подходит к области W, процесс затянут во времени, точка Y(t) не попадает в W из-за автоколебаний в ее окрестности.
Под действием алгоритма адаптации на n=126 цикле адаптации получен вектор параметров ![]() =(30,4, 21,13, 11,63, 0,1), обеспечивающий перемещение вектора Y(0) в область W с одним переключением знака управления, как и должно быть. Функции y1(t), y2(t) после n=126 цикла адаптации представлены на рис.3.
=(30,4, 21,13, 11,63, 0,1), обеспечивающий перемещение вектора Y(0) в область W с одним переключением знака управления, как и должно быть. Функции y1(t), y2(t) после n=126 цикла адаптации представлены на рис.3.
Сходимость алгоритма оценивалась с помощью функции
![]() , (11)
, (11)
где t=1000, с*=(1, 0,5, 0,5, 0,125)Т – вектор истинных параметров.
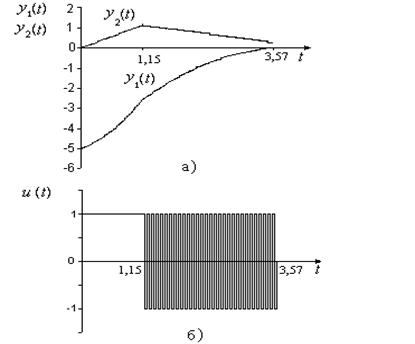
Рис. 2 Функции y1(t), y2(t), u(t) на первом цикле адаптации
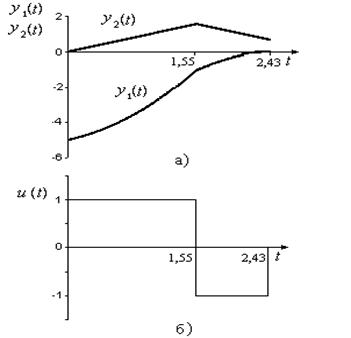
Рис. 3 Функции y1(t), y2(t), u(t) на последнем цикле адаптации
Характер функции Vn, представленный на рис.4, показывает, что предложенный алгоритм позволяет обеспечить довольно хорошее поведение системы в процессе адаптации.
Рис. 4 Функция Vn
Выводы. 1. Алгоритм адаптации (8)-(10) с учетом (6), (7) сходится за конечное число шагов. 2. Регулятор (6), (7) обеспечивает процесс управления с минимальным временем после окончания процесса адаптации. В отличие от других известных алгоритмов, предложенный здесь алгоритм использует дополнительную информацию о движении объекта в форме (5).
Дальнейшие исследования предполагается направить на поиск приемов и способов построения терминального управления объектами третьего порядка с элементами дифференцирования.
The algorithm of terminal control of dynamic system at absence a priori information about parameters of system is submitted. Feature of dynamic system is the presence of pair zero poles and zero in transfer function. The results of modelling of a control system are given.
1. Крутько П.Д. Алгоритмы терминального управления линейных динамических систем / П.Д. Крутько // Известия РАН. Теория и системы управления. – 1998. - №6. – С.33-45.
2. Кучеров Д.П. Об одной задаче синтеза адаптивной системы управления, субоптимальной по быстродействию / Кучеров Д.П. // Праці П’ятої Української конференції з автоматичного управління ²Автоматика-98²: Київ, 13-16 травня 1998 р. – Ч.І. – К., 1998. – С.238-244.
3. Кучеров Д.П. Алгоритм адаптивного термінального управления потрійним інтегратором / Кучеров Д.П., Василенко О.В., Іванов Б.П. // Вісник Вінницького політехнічного інституту. – 2009. – №2. - с. 22-27.
4. Кучеров Д.П. Адаптивное терминальное управление динамическим объектом, квазиоптимальное по быстродействию / Кучеров Д.П. // Вестник СевГТУ. Вып. 72: Автоматизация процессов и управление: Сб. науч. тр. – Севастополь: Изд-во СевНТУ, 2006. – С.52-58.
5. Рустамов Г.А. Синтез финитного управления с переменной структурой для регулируемых объектов, передаточные функции которых содержат нули / Рустамов Г.А. // Известия РАН. Теория и системы управления. – 2004. – №6. – С.22-27.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.