УДК 519.7
О ПОЛУЧЕНИИ ЖЕЛАЕМЫХ ПОКАЗАТЕЛЕЙ КАЧЕСТВА АДАПТИВНОЙ СИСТЕМЫ С ОБРАТНОЙ МОДЕЛЬЮ
Клименко А.К.
1. Постановка проблемы и ее связь с практическими заданиями. Известны автоматизированные технологические объекты (АТО), в которых управление осуществляется по циклически повторяющимся программам. Примерами таких АТО являются металлорежущие станки с программным управлением и станы горячей прокатки. Управляющие программы готовятся в условиях неполной информации об объекте управления и возмущающих воздействиях. Поэтому требуется корректировка управляющих программ как во время их разработки, так и в процессе эксплуатации. Системы, в которых осуществляется такая корректировка, называются системами с изменяемой программой (1), системами с самоустанавливающейся программой [2], самонастраивающимися системами «от детали к детали» [3] и адаптивными системами [4]. В данной статье будем называть их системами с адаптивной корректировкой управляющих программ.
Существуют технологические процессы, в которых измерение ошибки воспроизведения программы возможно лишь в промежутках между циклами ее воспроизведения. Примером может служить обработка деталей сложной форме на станках с числовым программным управлением. При корректировке текущей программы используется информации об ошибках в предыдущих циклах ее воспроизведения. Эти ошибки суммируются с исходной программой при помощи дискретного интегратора.
Имеется ряд проблем, препятствующих практическому применению адаптивных систем этого класса. К ним относятся обеспечение сходимости процесса адаптации, производительности (скорости сходимости) и достигаемой предельной точности. Эти проблемы отличаются друг от друга. Для их преодоления требуются различные технические решения. Такие решения имеются, но решение конкретной проблемы, как правило, затрудняет решение смежной проблемы или порождает новую проблему. Требуются такие технические решения, которые решают одновременно более одной проблемы и помогают решению других смежных проблем.
Как было показано Андрейчиковым Б.И. [5], при реализации контура адаптации на аналоговых средствах автоматики и вычислительной техники процесс адаптации сходится на первых циклах воспроизведения программ и неизбежно расходится в последующих. Поэтому проблема обеспечения сходимости процесса адаптации в аналоговых системах не нашла законченного решения.
В системах с квантованным по времени представлением информации имеются технические решения, но и они обладают существенными недостатками. В работе [6] предложена адаптивная система, в которой в качестве формирователя корректирующего сигнала используется безынерционное динамическое звено. В этом техническом решении даже при оптимизации коэффициента усиления для завершения процесса адаптации требуется N циклов корректировки программы, где N – количество кадров в программе, что недопустимо. Кроме того, после окончания процесса адаптации остаются ошибки в промежутках дискретного времени.
В работе [7] предложено техническое решение адаптивной системы, в которой можно обеспечить полную корректировку программы уже после одного цикла ее воспроизведения. Для этого в контуре адаптации необходимо осуществить обратную модель (ОМ) АТО. Как известно, идеальная ОМ реального динамического объекта физически неосуществима. Но в адаптивной системе допустимо применение ОМ, которая отличается от идеальной чистым временным запаздыванием. Позднее в работах [8,9] были предложены технические решения приближенных ОМ, реализуемых на средствах дискретной вычислительной техники и пригодных для использования в адаптивных системах.
Если в процессе адаптации имеют место случайные возмущающие воздействия, требуются дополнительные технические решения по устранению их влияния. В данной работе рассматривается задача получения желаемых показателей качества адаптивной системы при использовании ОМ АТО в предположении, что случайные возмущения отсутствуют.
На показатели качества адаптивной системы можно влиять изменением только двух конструктивных параметров дискретной ОМ: дискретности времени (рабочей частоты) и конструктивного временного сдвига. Поэтому требуются такие технические решения, которые дают возможность изменять параметры ОМ в широких пределах без потери ее работоспособности.
2. Анализ известных решений. Было выполнено значительное количество работ по отдельным проблемам адаптивной корректировки циклически повторяющихся управляющих программ. Для пояснения известных технических решений на рис.1 приведена типовая структурная схема адаптивной системы c использованием в контуре адаптации дискретной ОМ АТО. Символами на схеме обозначены: УП – управляющая программа, АТО – автоматизированный технологический объект, ТМР – таймер, ДИ – дискретный интегратор.
Система по рис.1 функционирует следующим образом.
Управляющая программа ![]() состоит из N кадров дискретного времени (
состоит из N кадров дискретного времени (![]() ). Она циклически повторяется и не изменяется от цикла к циклу.
). Она циклически повторяется и не изменяется от цикла к циклу.
АТО является непрерывным, но его выходной сигнал оценивается в дискретные моменты времени:
![]() ,
, ![]() , n=0,1,2,…,N,
, n=0,1,2,…,N,
где γ – дробная часть дискретного времени.
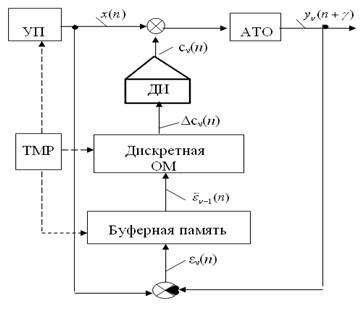
Рис.1 Типовая структурная схема адаптивной системы
Ошибки могут быть измерены как одновременно с выполнением программы (на прокатном стане), так и в промежутках между циклами (металлорежущие станки). Ошибка каждого цикла воспроизведения программы регистрируется в буферной памяти:
![]() ,
, ![]() ,
,
где ν – номер цикла воспроизведения программы.
В буферной памяти информация об ошибках изменяется с целью улучшения показателей качества адаптивной системы. На основании зарегистрированной ошибки в дискретной ОМ вычисляется и подается на вход дискретного интегратора поправка на программу ![]() . Корректировка программ в общем случае осуществляется по формуле:
. Корректировка программ в общем случае осуществляется по формуле:
![]() ,
, ![]() , ν=1,2,…, (1)
, ν=1,2,…, (1)
где ![]() – корректирующий сигнал,
– корректирующий сигнал, ![]() – коэффициент усиления в контуре адаптивной корректировки,
– коэффициент усиления в контуре адаптивной корректировки, ![]() – ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
– ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
Ошибки изготовления деталей состоят из регулярной и случайной составляющих. Последняя является центрированной аддитивной. Источником ее могут выступать как процесс обработки деталей сложной формы, так и ошибки автоматического измерения размеров последних. Если статистические характеристики регулярной составляющей возмущающего воздействия и случайной помехи стационарны, целью адаптации является формирование корректирующего сигнала, обеспечивающего сведение к нулю регулярной составляющей ошибки. Для этого требуется сходимость процесса (1). В данной работе рассматривается задача обеспечения сходимости процесса в предположении, что случайные возмущающие воздействия отсутствуют. Это позволяет коэффициент усиления ![]() в контуре адаптации принять равным единице.
в контуре адаптации принять равным единице.
Указанная ОМ должна удовлетворять следующему требованию: переходная характеристика комплекса из последовательно соединенных ОМ и АТО в дискретном времени имеет вид:
![]() (2)
(2)
где n – дискретное время.
Техническое решение дискретной ОМ, удовлетворяющей условию (2), было предложено позднее и защищено авторским свидетельством [8]. Теоретическое обоснование решения приведено в [9].
Недостатком ОМ [8,9] является то обстоятельство, что она выполнена в виде замкнутой импульсной системы. Такие системы обладают колебательностью в промежутках дискретного времени и требуется применение специальных технических решений для их устранения.
В работе [10] предложено техническое решение по устранению колебательности адаптивной системы. Недостатком этого решения сохраняется ограниченная возможность изменения конструктивных параметров ОМ с целью улучшения показателей качества адаптивной системы.
В работе [11] была предложена схема дискретной ОМ, у которой можно менять в широких пределах конструктивные параметры с целью облегчения задачи устойчивости и изменения показателей качества. Теоретическое обоснование этого технического решения выполнено в работе [12].
Ниже рассматриваются вопросы получения желаемых показателей качества адаптивной системы, в которой используется предложенная в [11,12] ОМ АТО.
3. Исходные данные и постановка задачи. Предполагается, что АТО, для которого требуется создать ОМ, линейный, стационарный, устойчив, а также может обладать чистым временным запаздыванием. В качестве исходного математического описания АТО выступает его переходная характеристика (ПХ) ![]() , именуемая также и кривой переходного процесса. ПХ может быть получена как различными аналитическими способами, так и методами электронного моделирования или технического эксперимента. Она представлена в непрерывном времени. На рис.2 изображен типовой график такой ПХ.
, именуемая также и кривой переходного процесса. ПХ может быть получена как различными аналитическими способами, так и методами электронного моделирования или технического эксперимента. Она представлена в непрерывном времени. На рис.2 изображен типовой график такой ПХ.
В качестве параметров ПХ будем использовать те, которые приняты в литературе по автоматическому управлению (см., например, [13]). К ним, как показано на рисунке, относятся:
hust – установившееся значение переходного процесса,
τ0 – чистое временное запаздывание АТО (если оно имеется),
Δ – малая величина, принимаемая за допустимую ошибку,
T1 – время переходного процесса ![]() ,
,
Тz – длительность переднего фронта, которую дальше будем называть временным запаздыванием,
hmax – максимальное значение переходного процесса.
Указанные параметры используются как при при конструировании ОМ, так и при оценке показателей качества создаваемой адаптивной системы.
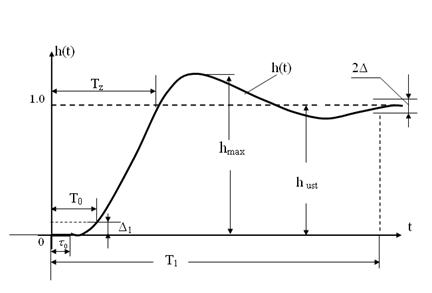
Рис.1 Типовая переходная характеристика АТО
Для решения задачи конструирования ОМ введем также параметр Т0 – конструктивный временной сдвиг АТО. Оно превышает чистое временное запаздывание АТО (Т0 > τ0) и удовлетворяет требованиям:
![]() ,
, ![]() , (4)
, (4)
где ![]() – конечная постоянная величина.
– конечная постоянная величина.
В качестве исходных данных при постановке задачи приведём и краткие сведения о техническом решении ОМ, описанном в [9]. ОМ является замкнутой импульсной системой, конструктивными параметрами которой выступают дискретность времени Т и конструктивный временной сдвиг T0. Для осуществления ОМ составляется математическое описание скорректированного АТО, который сдвинут относительно исходного в сторону опережения и физически осуществим. Скорректированный АТО в дискретном времени описывается импульсной переходной функцией (ИПФ), которая является реакцией на входное воздействие в виде кратковременного импульса единичной площади. Числовой массив ИПФ может быть получен из кривой переходного процесса АТО h(t):
![]() ,
, ![]() , (5)
, (5)
где t – непрерывное время,
T – дискретность (шаг квантования) времени,
n – дискретное время (![]() ,
, ![]() –моменты непрерывного времени, кратные Т),
–моменты непрерывного времени, кратные Т),
N1 – время затухания переходного процесса ,
τ – конструктивный временной сдвиг в сторону опережения, переведенный в дискретное время (![]() ).
).
При выполнении данной работы используется известная из [12] ОМ АТО. Она описывается математической зависимостью:
 ,
, ![]() , (6)
, (6)
где ![]() и
и ![]() – соответственно входной и выходной сигналы ОМ,
– соответственно входной и выходной сигналы ОМ,
k(∙) – ИПФ АТО,
![]() ,
,
![]() ,
,
![]() установившееся значение ПХ АТО,
установившееся значение ПХ АТО,
![]() – переменная суммирования.
– переменная суммирования.
Как показано в [14], ОМ, описываемая выражением (6), обеспечивает устойчивость работы при изменении параметров Т и Т0 в широких пределах при условии сохранения условий (4). Поэтому эти параметры можно выбирать из соображений обеспечения желаемых показателей качества адаптивной системы по рис.1.
В данной работы рассматриваются следующие задачи:
- формулировка показателей качества адаптивной системы,
- составление инструментальной схемы для численного конструирования ОМ с обеспечением желаемых показателей качества,
- составление методики численного определения показателей качества,
- оценка потерь, которыми необходимо расплачиваться за улучшение показателей качества.
4. Изложение результатов исследования. Известны [13] показатели качества следящих систем, определяемые по кривой переходного процесса. Они же могут быть применены и относительно адаптивной системы по рис.1.
Динамические характеристики контура адаптации определяются двумя последовательно соединенными динамическими звеньями – обратной моделью и самим АТО. Поэтому для оценки показателей качества адаптивной системы достаточно построить кривую переходного процесса комплекса «ОМ—АТО». Эта кривая по виду аналогична изображенной на рис.2 ПХ АТО, но имеет другие технические параметры.
Если бы ОМ АТО была идеальной, то ПХ комплекса «ОМ—АТО» представляла бы собой единичную ступенчатую функцию. Реальная же ПХ отличается от идеальной, а эти отличия могут выступать как показатели качества адаптивной системы.
Такими показателями являются:
- время переходного процесса,
- перерегулирование,
- временное запаздывание.
В идеальном случае каждый из этих показателей должен быть равным нулю. Но это недостижимо, поэтому желательно их минимизировать.
Уменьшение времени переходного процесса повышает быстродействие контура адаптации.
Перерегулирование контура адаптации определяется выражением
![]()
где ![]() и
и ![]() — соответственно максимальное и установившееся значения ПХ комплекса «ОМ—АТО». Уменьшение или устранение перерегулирования повышает конечную точность процесса адаптации, но это может повлечь за собой увеличение времени переходного процесса.
— соответственно максимальное и установившееся значения ПХ комплекса «ОМ—АТО». Уменьшение или устранение перерегулирования повышает конечную точность процесса адаптации, но это может повлечь за собой увеличение времени переходного процесса.
Временное запаздывание не является серьезным недостатком. Если оно известно, то может быть компенсировано упреждающим временным сдвигом в контуре адаптации.
Для обеспечения возможности численного конструирования адаптивной системы по рис.1 с соблюдением зависимостей (4), (5), (6) создается инструментальная схема, включающая в себя последовательно соединенные ОМ АТО и сам АТО. АТО может быть заменен его имитационной моделью. Схема приведена на рис.3.
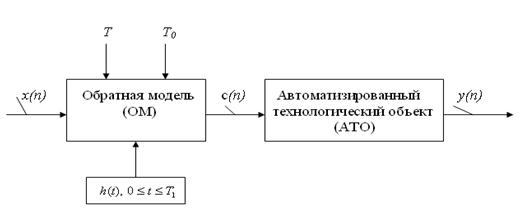
Рис.3 Инструментальная схема для оценки показателей качества
Символами на схеме обозначены: x(n) и c(n) – входной и выходной сигналы ОМ, y(n) – выходной сигнал АТО, Т – дискретность времени ОМ, Т0 – конструктивный временной сдвиг, h(t) – ПХ АТО, T1 – время переходного процесса АТО.
В постоянной памяти ОМ хранится математическое выражение ПХ АТО h(t) в интервале времени переходного процесса Т1. В ОМ имеется подпрограмма для формирования массива ИПФ АТО по формуле [5] согласно введенным значениям дискретности времени Т и конструктивного временного сдвига Т0.
На вход АТО, который является аналоговым, поступает в дискретном времени выходной сигнал ОМ. Для моделирования АТО в схеме по рис.3 может быть использована известная [14] формула свертки:
![]() ,
,![]() , (7)
, (7)
где с(n-m) – выходной сигнал ОМ,
γ – дробная часть дискретного времени
m – переменная суммирования.
Инструментальная схема функционирует следующим образом.
На входе ОМ циклически повторяется единичная ступенчатая функция, а с выхода АТО снимаются кривые переходного процесса. Сначала вводятся исходные значения параметров T и T0 и регистрируется кривая ПХ. Затем строится семейство кривых при исходном Т и различных значениях параметра T0. На основании аналиа кривых делается заключении о влиянии конструктивного временного сдвига на показатели качества адаптивной системы.
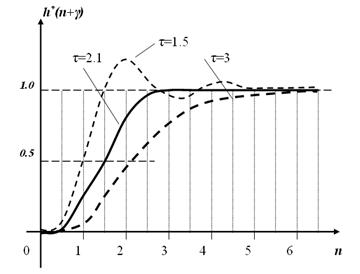
Рис.4 Кривые ПХ комплекса «ОМ—АТО» при различных значениях параметра ![]()
На рис.4 приведен пример кривых ПХ комплекса «ОМ –АТО» при одном значении дискретности вреиени Т и различных значениях конструктивного временного сдвига, представленного в дискретном времени (![]() ). Из рисунка следует, что при уменьшении параметра
). Из рисунка следует, что при уменьшении параметра ![]() увеличиваются перерегулирование и время переходного процесса, а временное запаздывание уменьшается. При существенном увеличении параметра
увеличиваются перерегулирование и время переходного процесса, а временное запаздывание уменьшается. При существенном увеличении параметра ![]() перерегулирование исчезает, но увеличиваются время переходного процесса и временное запаздывание. Для каждого заданного значения дискретности можно найти такое значение параметра
перерегулирование исчезает, но увеличиваются время переходного процесса и временное запаздывание. Для каждого заданного значения дискретности можно найти такое значение параметра ![]() , при котором время переходного процесса минимально, а перерегулирование невелико или полностью отсутствует. Такое значение конструктивного временного сдвига в большинстве случаев является оптимальным.
, при котором время переходного процесса минимально, а перерегулирование невелико или полностью отсутствует. Такое значение конструктивного временного сдвига в большинстве случаев является оптимальным.
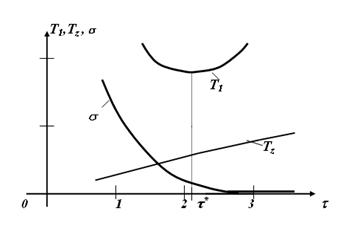
Рис.5 Зависимость показателей качества от конструктивного временного сдвига ![]()
На рис.5 приведены графики зависимостей показателей качества адаптивной системы от величины конструктивного временного сдвига при одном значении дискретности времени ОМ. Символами на рисунке обозначены: Т1 – время переходного процесса, Тz – временное запаздывание, ![]() – перерегулирование,
– перерегулирование, ![]() – оптимальное значение конструктивного временного сдвига.
– оптимальное значение конструктивного временного сдвига.
Исследование влияния величины дискретности на показатели качества было проведено следующим образом. В инструментальную схему по рис.3 поочередно вводились численные значения дискретности Т . Для каждого из них строилось семейство кривых переходного процесса комплекса «ОМ—АТО» подобно показанному на рис. 4 при различных значениях конструктивного временного сдвига ![]() . По результатам анализа определялись оптимальное значение конструктивного временного сдвига
. По результатам анализа определялись оптимальное значение конструктивного временного сдвига ![]() и показатели качества.
и показатели качества.
Результаты этого исследования показали следующее. Уменьшение дискретности времени (или повышение рабочей частоты ) ОМ влечет за собой улучшение показателей качества адаптивной системы. Уменьшаются время переходного процесса Т1 и временное запаздывание Тz. Но уменьшение дискретности времени ОМ не может быть беспредельным, т.к. оно влечет за собой резкое повышение объема вычислительных операций в контуре адаптации.
Рассмотрим количество вычислений за время переходного процесса Т1 в АТО по формуле (6). Количество значений ИПФ АТО в числовом массиве (5) ![]() . Этой же величине равно и количество вычислений одного значения переменной
. Этой же величине равно и количество вычислений одного значения переменной ![]() на временном интервале Т1. Количество самих значений переменной
на временном интервале Т1. Количество самих значений переменной ![]() также равно числу
также равно числу ![]() . Отсюда следует, что количество вычислительных операций при работе ОМ по формуле (6) равно
. Отсюда следует, что количество вычислительных операций при работе ОМ по формуле (6) равно![]() , т.е. оно обратно квадрату дискретности времени.
, т.е. оно обратно квадрату дискретности времени.
Отсюда следует, что при конструировании адаптивной системы выбор дискретности времени должен быть определен компромиссом между получаемыми показателями качества и платой за это усложнением системы.
5. Экспериментальная часть. Изложенное подтверждено электронным моделированием. Отдельные технические решения проверялись с использованием пакета прикладных программ Mathcad. Для моделирования всей адаптивной системы была разработана прикладная компьютерная программа. Приведенные в данной работе иллюстрации получены на основании электронного моделирования.
6. Выводы по результатам исследований и перспективы.
6.1. Применение улучшенной ОМ АТО делает возможным корректировку показателей качества адаптивной системы в широких пределах. Во-первых, повышение рабочей частоты ОМ позволяет одновременно улучшать все показатели качества. Во-вторых, после определения рабочей частоты ОМ можно путем изменения конструктивного временного сдвига ![]() изменять в желаемом направлении один из показателей качества или совокупность показателей.
изменять в желаемом направлении один из показателей качества или совокупность показателей.
6.2. В предложенной структурной схеме адаптивной системы решены комплексно следующие задачи для случая отсутствия помех. Во-первых, обеспечивается скорость сходимости процесса адаптации за один цикл. Во-вторых, в системе устраняются колебания в промежутках дискретного времени. В-третьих, максимально повышается быстродействие контура адаптации.
6.3. Полученные результаты полезны и для случая обеспечения сходимости процесса адаптации при наличии случайных помех. В системе по рис.1 может быть непосредственно использован известный [16] способ оптимизации коэффициента усиления по результатам статистического анализа зарегистрированных ошибок управления. Такая возможность обеспечивается применением в контуре адаптации системы ОМ АТО.
6.4. Рассматриваемая адаптивная система не является сложной при практической реализации. Все элементы контура адаптации могут быть выполнены программно. Для уменьшения объема вычислительных операций и используемой памяти при работе системы некоторые вычисления могут быть выполнены еще на стадии проектирования. В частности, улучшенная ОМ и буферная память могут быть преобразованы в простое динамическое звено, описываемое числовым массивом ИПФ.
Полученные результаты могут быть использованы при разработке систем автоматизированного проектирования и отладки программ автоматического управлении дискретно-непрерывными технологическими процессами. Дальнейшими шагами в этом направлении являются решение проблемы автоматического измерения размеров деталей сложной формы и разработка систем автоматической корректировки программ по результатам измерений.
The system of adaptive control of cyclically repeating technological processes with use of return model of the automated object is considered. Parameters of quality are formulated. The technique of experimental definition of parameters of quality is stated.
1. Ивахненко А.Г. Техническая кибернетика. К: Гостехиздат УССР, 1959. – 423 с.
2. Перельман И.И. Регулирование по принципу самоустанавливающейся программы // Автоматика и телемеханика. – 1958, №9. – С. 813-823.
3. Кобринский А.Е., Колискор А.Ш., Левковский Е.И., Попов В.Е., Сергеев В.И. Самонастраивающаяся система программного управления станками // Вестник АН СССР. – 1965, №9. – С. 52-57.
4. Цыпкин Я.З. Адаптация и обучение в автоматических системах. – М.: Наука, 1968. – 400 с.
5. Андрейчиков Б.И. Динамическая точность систем программного управления станками. – М.: Машиностроение, 1964. – С. 242-267.
6. Перельман И.И. Самонастраивающаяся программа как средство для получения заданной реакции на выходе линейного динамического объекта регулирования // Автоматика и телемеханика. – 1958. – №4. – С.312-320.
7. Клименко А.К. О сходимости процессов адаптации в цифровых системах программного управления станками // Сб. «Адаптивные системы управления металлорежущими станками» / Под ред. А.Е. Кобринского, Сер. С-1. — М.: НИИМАШ, 1971.— С.58-67
8. Клименко А.К., Клименко В.Г. Корректирующее устройство. – Авт. свид. СССР №1406563.– Бюллетень изобретений, №24, 1988.
9. Клименко А.К. Обратная модель для решения задач управления и контроля качества / Методы менеджмента качества // Надежность и контроль качества. – 1999 – №8. – С. 32-39.
10. Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени // Автоматика. Автоматизация. Электротехнические комплексы и системы. – 2008, №2. – С.141-150.
11. Клименко А.К. Обратная модель с улучшенными показателями качества //Труды международного симпозиума “Надёжность и качество 2003” / Под ред. Н.К. Юркова.- Пенза: Информационно-издательский центр Пенз. гос. ун-та, 2003.- С. 237-239.
12. Клименко А.К., Тарасов А.А. О численном конструировании обратных моделей линейных динамических объектов // Вопросы устойчивости и безопасности систем. М.: ВЦ РАН, 2007. Вып.9. - С. 81-84.
13. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд. третье, исправленное. – М.: Наука, 1975. – С. 267-269, 426.
14. Клименко А.К. О влиянии конструктивных параметров обратной модели на ее устойчивость // Автоматика. Автоматизация. Электротехнические Комплексы и Системы (ААЭКС). – 2005, №2. – С. 52-57.
15. Цыпкин Я.З.Теория линейных импульсных систем. – М.: Физматгиз, 1963. – С.269.
16. Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью // Автоматика. Автоматизация. Электротехнические комплексы и системы. – 2006, №2. – С.125-131.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.