УДК 519.7
ОБ ОБЕСПЕЧЕНИИ СХОДИМОСТИ ПРОЦЕССА АДАПТАЦИИ ПОСРЕДСТВОМ ВОСПРОИЗВЕДЕНИЯ ИЗМЕРИТЕЛЬНОЙ ПРОГРАММЫ В ОБРАТНОМ ВРЕМЕНИ
Клименко А.К.
1. Наличие проблемной ситуации. Известны автоматизированные технологические объекты (АТО), в которых управление осуществляется по циклически повторяющимся программам. Примерами таких АТО являются металлорежущие станки с программным управлением и станы горячей прокатки. Управляющие программы готовятся в условиях неполной информации об объекте управления и возмущающих воздействиях. Поэтому требуется корректировка управляющих программ как во время их разработки, так и в процессе эксплуатации. Системы, в которых осуществляется такая корректировка, называются системами с изменяемой программой [1], самонастраивающимися системами «от детали к детали» [2], системами с самоустанавливающейся программой [3] и адаптивными системами [4]. В данной статье будем называть их системами с адаптивной корректировкой управляющих программ.
Имеется ряд работ, в которых рассматриваются вопросы осуществления систем с адаптивной корректировкой управляющих программ, сходимости процессов в них и достигаемой точности. Но нет законченных и эффективных технических решений. Поэтому системы с адаптивной корректировкой управляющих программ не нашли промышленного применения.
В данной работе поставлены задачи эффективного решения проблемы осуществления рассматриваемых адаптивных систем с обеспечением устойчивости их работы и получением желаемых показателей качества.
2. Анализ известных решений и применение их к постановке задачи. Для пояснения известных технических решений на рис.1 приведена общая структурная схема адаптивной системы. На ней символами УП и АТО обозначены соответственно управляющая программа и автоматизированный технологический комплекс.
Система по рис.1 работает следующим образом.
При корректировке текущей программы используется информация об ошибках в предыдущих циклах ее воспроизведения. Эти ошибки суммируются с исходной программой при помощи накапливающего сумматора.
Корректировка программ в общем случае осуществляется по формуле
![]() ,
, ![]() , (1)
, (1)
где t – время, ν – номер цикла воспроизведения программы, ![]() – длительность программы,
– длительность программы, ![]() – корректирующий сигнал,
– корректирующий сигнал, ![]() – коэффициент усиления в контуре адаптивной корректировки,
– коэффициент усиления в контуре адаптивной корректировки, ![]() – ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
– ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
Ошибки изготовления деталей состоят из регулярной и случайной составляющих. Последняя является центрированной аддитивной. Источником ее могут выступать как процесс обработки деталей сложной формы, так и ошибки автоматического измерения размеров последних.
В дальнейшем будем пользоваться следующим выражением для общей ошибки воспроизведения программы ![]() -го цикла:
-го цикла:
![]() ,
,
где ![]() и
и ![]() – соответственно регулярная и случайная составляющие.
– соответственно регулярная и случайная составляющие.
Целью адаптации является формирование корректирующего сигнала, устраняющего регулярную составляющую ошибки и/или сводящего к минимуму средний квадрат общей ошибки ![]() при ν →∞. Для этого требуется сходимость процесса (1).
при ν →∞. Для этого требуется сходимость процесса (1).
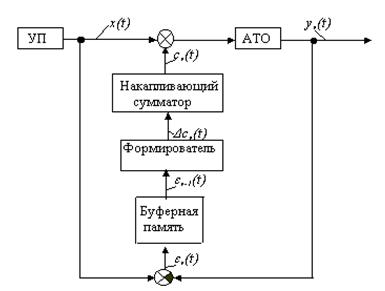
Рис.1. Общая структурная схема системы
с адаптивной корректировкой управляющей программы.
Коэффициент усиления ![]() в процессе (1) может быть как постоянным, так и изменяющимся от цикла к циклу. Последнее необходимо для обеспечения устойчивости при наличии случайных возмущений. В случае наличия только регулярной составляющей ошибки сходимость процесса может быть обеспечена и при постоянстве коэффициента
в процессе (1) может быть как постоянным, так и изменяющимся от цикла к циклу. Последнее необходимо для обеспечения устойчивости при наличии случайных возмущений. В случае наличия только регулярной составляющей ошибки сходимость процесса может быть обеспечена и при постоянстве коэффициента ![]() .
.
В работах [3,5] рассмотрена корректировка управляющей программы, представленной в дискретном времени. Квантование программы по времени облегчает решение задач, но не было получено результатов, пригодных для эффективного применения.
В [5] рассматривается сходимость процесса при отсутствии внешних помех. Показано, что при выборе оптимального коэффициента усиления для полной корректировки программы число циклов самонастройки должно быть равно числу тактов дискретного времени в программе. Это число для практики является неприемлемо большим. Кроме того, после окончания процесса адаптации остаются существенные ошибки в промежутках дискретного времени.
В работе [6] исследованы системы программного управления с непрерывным представлением управляющей информации. Показано, что процесс самонастройки в этом случае сходится только в области низких частот. Ошибка управления уменьшается при первых циклах воспроизведения программ и неограниченно растет в последующих циклах. Возникла проблема нахождения технических решений двух задач: расширить полосу частот, в которой процесс сходится, и повысить эффективность самонастройки при ограниченном числе циклов. Таких решений предложено не было и самонастраивающиеся системы (СНС) этого типа не нашли промышленного применения.
В работе [7] предложен способ обеспечения сходимости процесса посредством использования дискретной обратной модели. Но, как известно, идеальная обратная модель реального объекта физически неосуществима, а применение приближенных обратных моделей не всегда обеспечивает получение ожидаемого положительного результата.
Результаты упомянутых выше работ были использованы при решении поставленной в данной работе проблемы.
Как показано в [6] Андрейчиковым Б.И., необходимым и достаточным условием сходимости при непрерывной форме представления адаптивной информации является выполнение неравенства
![]() ,
, ![]() , (2)
, (2)
где ![]() - амлитудно-фазовая характеристика (АФХ) АТО,
- амлитудно-фазовая характеристика (АФХ) АТО, ![]() — АФХ АТО по ошибке,
— АФХ АТО по ошибке, ![]() - частота.
- частота.
Условие (2) не может быть выполнено в неограниченной полосе частот. В реальных следящих системах фазовое запаздывание АФХ увеличивается с повышением частоты. Поэтому частотный годограф ![]() , как показано на рис.2, в полосах высоких частот выходит за пределы окружности единичного радиуса в нарушение условия сходимости (2). Это препятствует практическому применению адаптивных систем рассматриваемого класса при непрерывном представлении информации в контуре адаптации.
, как показано на рис.2, в полосах высоких частот выходит за пределы окружности единичного радиуса в нарушение условия сходимости (2). Это препятствует практическому применению адаптивных систем рассматриваемого класса при непрерывном представлении информации в контуре адаптации.
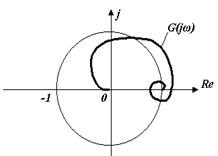
Рис.2. Амплитудно-фазовая характеристика по ошибке АТО
В данной работе, как и у Андрейчикова Б.И., использован частотный метод получения условия сходимости процесса адаптации, но уже при новом техническом решении.
При решении задачи определения условий сходимости процесса адаптации при дискретном представлении информации использована приведенная в [8] зависимость между импульсной переходной функцией АТО в дискретном времени и его АФХ..
3. Постановка задачи. Рассматривается проблема обеспечения сходимости процесса адаптации управляющих программ в предположении, что АТО является непрерывным, а управляющая программа может быть как непрерывной, так и квантованой по времени. Влияние случайных возмущающих воздействий на сходимость не рассматривается.
Для выхода из проблемы предлагается следующее техническое решение.
Сигнал ошибки каждого цикла воспроизведения программы можно рассматривать как спектр гармоник. Каждая гармоника имеет фазовое запаздывание, увеличивающееся с увеличением частоты. Именно это фазовое запаздывание делает невыполнимым условие сходимости (2) для системы по рис.1. Техническим решением проблемы является устранение фазового запаздывания в цепи зарегистрированной ошибки путем пропускания последней через АТО в обратном по времени направлении. Возникающее в обратном времени фазовое запаздывание относительно реального времени становится фазовым опережением. Поэтому общий фазовый сдвиг каждой гармоники ошибки из подаваемых на накапливающий сумматор становится равным нулю относительно управляющей программы.
В качестве АТО рассматривается станок с числовым программным управлением, на котором обрабатываются детали сложной формы. Как известно [9], измерение ошибок управления может осуществляться без съема детали со станка в промежутках между циклами воспроизведения управляющей программы, когда вместо режущего инструмента устанавливают измерительную головку. Погрешности обработки определяются с использованием специальной измерительной программы, в качестве которой используется исходная рабочая программа, но воспроизводимая в обратном времени.
К числу рассматриваемых задач относятся:
- техническое решение адаптивной системы с использованием в качестве измерительной программы рабочей программы посредством ее воспроизведения в обратном времени;
- определение параметров контура адаптации, обеспечивающих сходимость процесса при непрерывной форме представления информации;
- оценка применимости полученного результата к системам с квантованным по времени представлением информации в контуре адаптации.
Задача обеспечения сходимости процесса адаптации при работе в условиях случайных возмущений в данной работе не рассматривается.
4. Изложение материалов исследования. Для решения этой проблемы предлагается следующее техническое решение. Ошибка текущего воспроизведения программы, используемая для корректировки программы следующего цикла воспроизведения, пропускается через объект управления или его модель в обратном по времени направлении и подается на накапливающий сумматор через безынерционное усилительное звено.
Структурная схема предлагаемой адаптивной системы в режиме измерения ошибки приведена на рис.3.
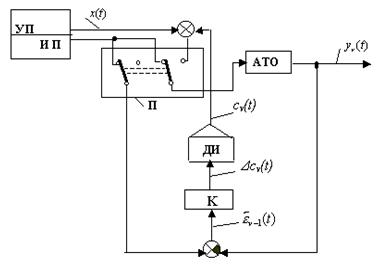
Рис.3. Структурная схема предлагаемой системы в режиме измерения.
Символами на схеме обозначены: УП и ИП – соответственно рабочая и измерительная программы, П – переключатель режимов работы системы «измерение – обработка», ДИ – дискретный интегратор, ![]() – коэффициент усиления безынерционного звена,
– коэффициент усиления безынерционного звена, ![]() – измеренная в обратном времени ошибка предшествующего воспроизведения программы.
– измеренная в обратном времени ошибка предшествующего воспроизведения программы.
Переключатель П на схеме изображен в положении режима измерения. В этом случае на вход АТО и на вход элемента сравнения поступает измерительная программа в обратном времени. При втором положении переключателя происходит обработка очередной детали. При этом на вход АТО одновременно поступают исходная управляющая программа УП и уже сформированный сигнал адаптивной коррекции ![]() .
.
Рассмотрим вопросы математического описания ошибки, измеренной в обратном времени, и сходимости процесса адаптации в системе по рис.3.
Предполагаем, что АТО является непрерывной следящей системой с постоянными параметрами и описывается АФХ, которая может быть представлена в виде:
![]() , (3)
, (3)
где ω – частота, φ(ω) – фазо-частотная характеристика, A(ω) – амплитудно-частотная характеристики, удовлетворяющая условию
![]() .
.
Входное воздействие АТО можно представить как сумму гармонических составляющих и ограничиться рассмотрением поведения системы относительно одной гармоники.
При прохождении гармоники через АТО в прямом времени его АФХ имеет вид (3). При прохождении этой же гармоники в обратном времени амплитудно-частотная характеристика не изменится, а фазо-частотная изменит знак на обратный. Поэтому при измерении детали по программе в обратном времени АФХ АТО получит вид:
![]() .
.
Пусть после обработки очередной детали до её измерения имеем ошибку
![]() , (4)
, (4)
которая после измерения в обратном времени, с учетом изменения знака в схеме сравнения, преобразуется к виду:
![]() .
.
Приращение корректирующего сигнала для последующей обработки детали, подаваемое на вход дискретного интегратора ДИ, имеет вид:
![]() . (5)
. (5)
Назначением приращения (5) является устранение ошибки (4) при последующей обработке детали.
Сигнал компенсации ошибки, порождаемый прохождением приращения (5) через АТО, после преобразований с использованием выражений (3) и (5) получает вид:
![]() .
.
Ошибка детали (4) после корректировки приращением (5) :
![]() (6)
(6)
Выражение в квадратных скобках можно рассматривать как амплитудно-фазовую характеристику по ошибке последовательности действий «измерение – безынерционное звено – воспроизведение скорректированной программы»
![]() . (7)
. (7)
Характеристика ![]() не содержит мнимой составляющей.
не содержит мнимой составляющей.
В адаптивной системе по рис.3 можно на основании ошибки текущей детали по выражению (6) определить ошибку обработки следующей детали.
Формулу (6) можно преобразовать для определения ошибки обработки детали любого номера, если известна ошибка первой детали: ![]()
![]() , (8)
, (8)
где ν – номер цикла корректировки программы.
Из зависимостей (7) и (8) следует условие сходимости процесса в адаптивной системе по рис.3. Процесс сходится, если амплитудно-фазовая характеристика по ошибке ![]() на комплексной плоскости не выходит за пределы окружности единичного радиуса:
на комплексной плоскости не выходит за пределы окружности единичного радиуса:
![]() ,
, ![]() . (9)
. (9)
Выполнение условия сходимости (9) обеспечивается простым выбором коэффициента усиления звена K в пределах
![]() . (10)
. (10)
Условия (9) и (10) в общем случае выполнимы в неограниченной полосе частот. На рис.4 показан вид амплитудно-фазовой характеристики ![]() на комплексной плоскости при выполнении условия (10).
на комплексной плоскости при выполнении условия (10).
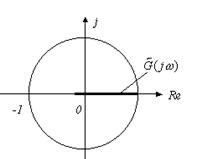
Рис.4 Амплитудно-фазовая характеристика по ошибке адаптивной системы по рис.3
Коэффициент усиления, ограничиваемый по величине выражением (10), влияет как на обеспечение сходимости процесса адаптации, так и на скорость сходимости. Процесс сходится за один цикл на частотах, для которых выполняется условие:
![]() . (11)
. (11)
Коэффициент усиления может быть как постоянным, так и изменяющимся. Уменьшение его от цикла к циклу требуется, например, для обеспечения сходимости в условиях помех.
Таким образом, в рассматриваемой адаптивной системе решена проблема обеспечения сходимости в предположении, что как объект управления, так и контур адаптации, непрерывны во времени. В наше время для управления используется преимущественно компьютерная техника, работающая в дискретном времени. Поэтому представляют интерес задачи обеспечения как сходимости процессов адаптации, так и скорости сходимости в случае, когда АТО непрерывен, а информация адаптации квантована по времени.
Эти задачи можно решить способом, аналогичным изложенному выше. Для этого требуется получить математические выражения для амплитудно-фазовой характеристики АТО в обратном времени.
Поступаем следующим образом. В качестве исходного математического описания АТО принимаем его переходную характеристику в непрерывном времени ![]() , которая может быть получена из передаточной функции при помощи обратного преобразования Лапласа или найдена экспериментально. Затем задаемся дискретностью времени T и находим числовой массив импульсной переходной функции АТО в дискретном времени:
, которая может быть получена из передаточной функции при помощи обратного преобразования Лапласа или найдена экспериментально. Затем задаемся дискретностью времени T и находим числовой массив импульсной переходной функции АТО в дискретном времени:
![]() ,
, ![]() , (12)
, (12)
где n – дискретное время, N1 – время затухания.
Как показано в [8], для АТО, описываемого импульсной переходной функцией (12), АФХ в дискретном времени может быть получена в виде:
![]() ,
, ![]() ,
,![]() (13)
(13)
где ![]() - приведенная к дискретному времени частота (
- приведенная к дискретному времени частота (![]() ).
).
АФХ ![]() является периодической функцией приведенной частоты
является периодической функцией приведенной частоты ![]() и повторяется с интервалом 2π.
и повторяется с интервалом 2π.
Для удобства дальнейших выкладок выражение для АФХ АТО (13) можно привести к виду, аналогичному для АФХ в непрерывном виде (3):
![]() , (14)
, (14)
где ![]() и
и ![]() – соответственно действительная и мнимая части выражения (13),
– соответственно действительная и мнимая части выражения (13),
![]() и
и ![]() – амплитудно-частотная и фазо-частотная характеристики.
– амплитудно-частотная и фазо-частотная характеристики.
Поскольку формулы (3) и (14) близки к идентичности, на основании выкладок, аналогичных приведенным выше, можно получить и выражения для ошибок корректировки и условия сходимости процесса в системе с квантованием адаптивной информации по времени.
АФХ по ошибке комплекса «измерение—безынерционное звено—обработка»
![]() ,
, ![]() .
.
Ошибка обработки детали по скорректированной программе:
![]() =
=![]() .
.
Условие сходимости
![]() ,
, ![]() . (15)
. (15)
Уменьшенный интервал частот в дискретном времени, достаточный для выполнения условия сходимости (15), объясняется тем, что график АФХ ![]() в диапазоне
в диапазоне ![]() является зеркальным отображением его же на интервале
является зеркальным отображением его же на интервале ![]() .
.
В переводе на частоту в непрерывном времени диапазон сходимости в (15) может быть записан в виде ![]() , где T – дискретность времени.
, где T – дискретность времени.
Рассматриваемый способ обеспечения сходимости процесса адаптации может быть реализован на средствах дискретной вычислительной техники с использованием компьютерной алгебры в качестве математического аппарата.
5. Экспериментальная часть. Полученные результаты подтверждены электронным моделированием. При этом были использованы специально разработанные программы.
6. Выводы по результатам исследования и перспективы.
6.1. Использование измерительной программы в обратном времени обеспечивает сходимость процесса адаптации независимо от формы представления информации в контуре адаптации. Для достижения сходимости достаточно выбора коэффициента усиления контура адаптации в широких пределах (10).
6.2. Предлагаемый способ обеспечивает и возможность получения высокой скорости сходимости процесса адаптации независимо от того, непрерывна или квантована по времени информация. Величина скорости определяется простым выбором коэффициента усиления K и зависит от полосы частот, в которой требуется устранение ошибок. В полосе пропускания АТО, где преобладает полезная информация, оптимальная величина К близка к единице. Если АТО обладает колебательностью, в районе резонансной частоты величина коэффициента усиления должна быть уменьшена в соответствии с зависимостью (11). С ростом частоты за полосой пропускания АТО, где преобладают помехи, скорость адаптаци быстро падает, что полезно. В полосе частот, где модуль АФХ АТО равен нулю, процесс адаптации не выполняется и не может расходиться.
6.3. Недостатком рассматриваемого способа обеспечения сходимости процесса адаптации является потеря рабочего времени АТО на измерение ошибок полученных деталей в паузах между циклами их обработки. Из-за этого недостатка ограничивается целесообразное количество циклов адаптации при отладке вновь разработанных программ.
Но этого недостатка можно избежать в том случае, когда ошибки программы могут измеряться одновременно с ее воспроизведением. Примерами могут служить прокатные станы или металлорежущие станки, в которых регистрируются текущие отклонения технологических параметров от желаемых. В этом случае зарегистрированная ошибка пропускается в обратном времени не через сам АТО, а через его модель. Моделирование может выполняться в ускоренном машинном времени. Исследования в этом направлении представляют интерес.
The problem of maintenance of convergence of process in system with adaptive updating cyclically repeating controlling programs is considered. The method of the problem solving is reproduction of the measuring program in return time. The method can be applied both to continuous systems and to systems with quantified on time representation of the information.
1. Ивахненко А.Г. Техническая кибернетика. К: Гостехиздат УССР, 1959. – 423 с.
2. Кобринский А.Е., Колискор А.Ш., Левковский Е.И., Попов В.Е., Сергеев В.И. Самонастраивающаяся система программного управления станками // Вестник АН СССР, 1965, №9. – С. 52-57.
3. Перельман И.И. Регулирование по принципу самоустанавливающейся программы // Автоматика и телемеханика. – 1958, №9. – С. 813-823.
4. Цыпкин Я.З. Адаптация и обучение в автоматических системах. – М.: Наука, 1968. – 400 с.
5. Перельман И.И. Самонастраивающаяся программа как средство для получения заданной реакции на выходе линейного динамического объекта регулирования // Автоматика и телемеханика. – 1958. – №4. – С.312-320.
6. Андрейчиков Б.И. Динамическая точность систем программного управления станками. – М.: Машиностроение, 1964. – С.242-267.
7. Клименко А.К. О сходимости процесса адаптации в цифровых системах программного управления станками. // Сб. «Адаптивные системы управления металлорежущими станками» / Под ред. А.Е. Кобринского, Сер. С—1. — М.: НИИМАШ, 1971. – С.58-67.
8. Цыпкин Я.З. Теория линейных импульсных систем. – М.: Физматгиз, 1963. – С.361.
9. Клименко А.К., Кожушков Н.П. Об автоматическом измерении на станках с ПУ погрешностей обработки деталей // Сб. “Числовые системы автоматического управления машинами”.- К.: Техніка,1975. – С. 83-85.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.