УДК 621.6.677.49 – 472.2
ЭФФЕКТИВНОСТЬ АДАПТИВНЫХ ФИЛЬТРОВ ПРИ РАССТРОЙКЕ ПРИНИМАЕМОГО И ОПОРНЫХ СИГНАЛОВ
Орлов В.В.
Одним из методов приема сигналов с неизвестными параметрами на фоне стационарных помех является построение многоканальной адаптивной обработки сигналов, в которой пространство параметров сигнала охватывается полосовыми фильтрами, расставленными по заданному уровню перекрытия [1]. Наиболее часто они применяются для временной обработки многоимпульсных сигналов с неизвестной частотой и при пространственной обработке с неизвестным направлением источника сигнала [2,3,4]. При этом принимаемый и опорный сигналы могут не совпадать, что может приводить к снижению эффективности систем обнаружения и оценки параметров сигнала. Значительно большая расстройка имеет место в случае алгоритмов минимизации мощности помех [3], для которых формирование весового вектора осуществляется без учета априорных сведений о законе модуляции принимаемого сигнала.
В условиях коррелированных помех с неизвестными параметрами, адаптация весовых коэффициентов фильтров осуществляется на основе оценки ковариационной матрицы помех, полученной по конечному числу обучающих выборок [1]. При этом, как правило, имеет место изменение закона распределения вероятностей выходного процесса, определяющее снижение среднего отношения сигнал/помеха и увеличение дисперсии флюктуаций весовых коэффициентов фильтров, что в конечном итоге приводит к рассогласованию характеристик приемных каналов. Хотя в настоящее время подробно исследованы энергетические показатели эффективности при совпадении принимаемого и опорного сигналов [2] и при их расстройке [3], но недостаточно внимания уделено анализу вероятностных характеристик и дисперсии флюктуаций отношения сигнал/помеха (с/п).
В настоящей работе рассматриваются вероятностные характеристики адаптивных фильтров и исследуется влияние флюктуаций весовых коэффициентов на отношение сигнал/помеха. Для этого, сначала проводится анализ в отсутствии рассогласования сигналов, затем на основе [4] исследуются погрешности из-за отсутствия априорных сведений о принимаемом сигнале.
1. Анализ для известного принимаемого сигнала
Полагается, что выборка помехи в момент времени ![]() представляется вектором
представляется вектором ![]() размера
размера ![]() , который подчиняется комплексному гауссову распределению с нулевым средним и ковариационной матрицей
, который подчиняется комплексному гауссову распределению с нулевым средним и ковариационной матрицей ![]() размера
размера ![]() , где *,T – знаки комплексного сопряжения и транспонирования. Опорный вектор
, где *,T – знаки комплексного сопряжения и транспонирования. Опорный вектор ![]() и вектор принимаемого сигнала
и вектор принимаемого сигнала ![]() при пространственной обработке определяются взаимным расположением сенсоров и источника сигнала, а в случае временной обработки - частотами и задержками импульсов. Вектор весовых коэффициентов, равный
при пространственной обработке определяются взаимным расположением сенсоров и источника сигнала, а в случае временной обработки - частотами и задержками импульсов. Вектор весовых коэффициентов, равный ![]() с точностью до постоянного множителя
с точностью до постоянного множителя ![]() максимизирует с/п при
максимизирует с/п при ![]() . Тогда на выходе фильтра определим мощности сигнала
. Тогда на выходе фильтра определим мощности сигнала ![]() , помехи
, помехи ![]() и с/п
и с/п ![]() в виде
в виде
![]() ;
; ![]() ;
; ![]() , (1)
, (1)
которое при ![]() максимизирует с/п, составляющее
максимизирует с/п, составляющее ![]() .
.
В условиях априорной неопределенности о параметрах помехи, ковариационная матрица помехи заменяется ее максимально правдоподобной оценкой по ![]() независимым выборкам помехи
независимым выборкам помехи
![]() . (2)
. (2)
При этом оценка весового вектора ![]() определяет с/п, нормированное к потенциальному значению, имеющее вид
определяет с/п, нормированное к потенциальному значению, имеющее вид
 . (3)
. (3)
Оценка с/п (3), исследовалась в [2], где было установлено, что она подчиняется b - распределению вида
![]() , 0<
, 0<![]() <1, (4)
<1, (4)
Среднее значение и дисперсия (4) являются мерой эффективности вызванных адаптацией потерь по отношению к оптимальному решению
![]() ;
; ![]() , (5)
, (5)
и не зависят от полезного сигнала и корреляционных свойств помехи, а определяется только размером фильтра ![]() -1 и объёмом обучающей выборки
-1 и объёмом обучающей выборки ![]() .
.
Тогда интервальная оценка в виде вероятности ![]() уменьшения с/п ниже величины
уменьшения с/п ниже величины ![]() определяется интегральной функцией от (4) и на основе свойств b-распределения
определяется интегральной функцией от (4) и на основе свойств b-распределения
[5] представима в виде
 (6)
(6)
На основе интегральной функции вероятности (6) нетрудно рассчитать вероятность попадания с/п ниже уровня 3 дБ потерь (![]() =0,5), которая быстро спадает с увеличением числа обучающих выборок, Так например, для
=0,5), которая быстро спадает с увеличением числа обучающих выборок, Так например, для ![]() >3 и
>3 и ![]() =0,5 если при
=0,5 если при ![]()
![]() =0,5, то при большем числе выборок
=0,5, то при большем числе выборок ![]()
![]() =0,0196, при
=0,0196, при ![]()
![]() =0,0032.
=0,0032.
2. Анализ для рассогласованных опорных и принимаемых сигналов
На практике расстановка каналов осуществляется по уровню перекрытия полос пропускания, составляющего не менее половинной мощности –3 дБ уровень потерь ![]() =2. Другой подход, основанный на одноканальном построении, реализуется опорным вектором
=2. Другой подход, основанный на одноканальном построении, реализуется опорным вектором ![]() и так как при этом не осуществляется когерентного накопления
и так как при этом не осуществляется когерентного накопления ![]() отсчетов, то его потери приближаются к величине
отсчетов, то его потери приближаются к величине ![]() .
.
Для обоих фильтров, аналогично (3), представим нормированное с/п при ![]()
![]() (7)
(7)
и исследуем его вероятностные характеристики в соответствии с методикой [4].
Для этого применим разложение ковариационной матрицы ![]() и вводя унитарную матрицу
и вводя унитарную матрицу ![]() размера
размера ![]() такую, что
такую, что
![]() ,
,  , (8)
, (8)
где ![]() ,
, ![]() - скаляры, матрица
- скаляры, матрица![]() подчиняется комплексному распределению Уишарта. Применяя дополнительную унитарную матрицу
подчиняется комплексному распределению Уишарта. Применяя дополнительную унитарную матрицу ![]() размера
размера ![]() , такую, что
, такую, что
![]() , получим вектор вида
, получим вектор вида ![]() . Тогда после преобразований (7) используя (8), получим
. Тогда после преобразований (7) используя (8), получим
![]() ,
, ![]() . (9)
. (9)
Для нахождения распределения ![]() необходимо сначала определить характеристики составляющих (9). Обозначив детерминированный параметр
необходимо сначала определить характеристики составляющих (9). Обозначив детерминированный параметр
 (10)
(10)
и используя известное выражение [2] плотности распределения вероятности вектора ![]()
![]() , (11)
, (11)
определим совместную плотность зависимых величин ![]() и
и ![]() , полагая, что
, полагая, что
![]() . После преобразований плотности распределения вероятности с точностью до
. После преобразований плотности распределения вероятности с точностью до ![]() - нормирующего множителя имеет вид
- нормирующего множителя имеет вид
![]() (12)
(12)
Теперь, чтобы найти распределение ![]() необходимо выполнить над (12) функциональные преобразования случайных величин в соответствии с (9). Для этого переходя к новым случайным величинам и исходя из равенства дифференциалов
необходимо выполнить над (12) функциональные преобразования случайных величин в соответствии с (9). Для этого переходя к новым случайным величинам и исходя из равенства дифференциалов
![]() после преобразований, с точностью до нормирующего множителя получим, что плотность распределения искомой величины
после преобразований, с точностью до нормирующего множителя получим, что плотность распределения искомой величины ![]() зависит от неинформативных случайных параметров
зависит от неинформативных случайных параметров ![]() и
и ![]()
![]() (13)
(13)
Для устранения мешающих параметров в (13) необходимо интегрировать ![]()
по всей области значений ![]() и
и ![]() . Учитывая, что
. Учитывая, что ![]() представляется в виде
представляется в виде
![]() ,
,
причем ![]() , то область интегрирования ограничивается неравенством
, то область интегрирования ограничивается неравенством
![]() . (14)
. (14)
Для определения раздельных интервалов интегрирования делаем замены переменных
![]() ;
;![]() и введем обозначения
и введем обозначения
![]() ;
; ![]() .
.
Тогда безусловная плотность распределения ![]() определяется в результате интегрирования
определяется в результате интегрирования
![]() (15)
(15)
где область интегрирования ![]() определяется для всех
определяется для всех ![]() , удовлетворяющих неравенствам
, удовлетворяющих неравенствам
![]() или
или  (16)
(16)
При этом, внутренний интеграл по переменной ![]() определяется из [6, ф.2.5.16.37]
определяется из [6, ф.2.5.16.37]
 ,
, ![]() (17)
(17)
где фигурные скобки определяют области интегрирования. Внешний интеграл определяется от степенной функции в области (16). После громоздких преобразований в (15), приходим
 , (18)
, (18)
где ![]() - интервал допустимых значений.
- интервал допустимых значений.
3. Исследование эффективности
Рассмотрим примеры плотностей распределения на выходе адаптивного фильтра максимизации с/п размера ![]() =5 при совпадении сигналов
=5 при совпадении сигналов ![]() ,
, ![]() =1, представленные на рис.1 и различии
=1, представленные на рис.1 и различии ![]() ,
,![]() =2 на рис.2.
=2 на рис.2.
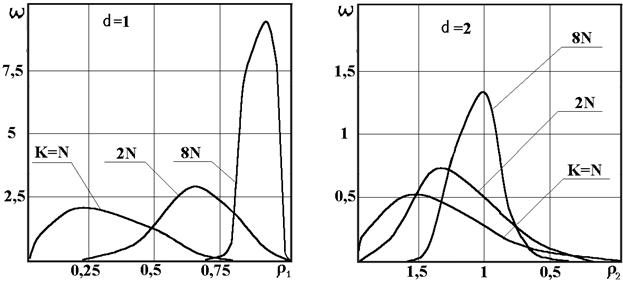
Рис. 1 Рис. 2
Из анализа зависимостей следует, что увеличение расстройки ![]() >1 больше сказывается на увеличении дисперсии с/п, а среднее менее подвержено влиянию ограниченного числа обучающих выборок. Кроме того, что область возможных значений с/п не ограничена сверху
>1 больше сказывается на увеличении дисперсии с/п, а среднее менее подвержено влиянию ограниченного числа обучающих выборок. Кроме того, что область возможных значений с/п не ограничена сверху ![]() , а расширяется до потенциального возможного значения
, а расширяется до потенциального возможного значения ![]() , достигаемого при совпадении принимаемого и опорного сигналов.
, достигаемого при совпадении принимаемого и опорного сигналов.
Как видно, существенное различие дисперсии распределений может приводить к увеличению вероятности попадания ниже допустимого с/п. Эта вероятность определяется интегрированием (18) с использованием обозначений (6)
![]() , (19)
, (19)
Установлено, что при![]() >3 вероятность попадания с/п ниже уровня 3 дБ (
>3 вероятность попадания с/п ниже уровня 3 дБ (![]() =0,5) составляет
=0,5) составляет ![]() =0,09 для числа выборок
=0,09 для числа выборок ![]() , а при
, а при ![]()
![]() =0,06. Следовательно, сходимость
=0,06. Следовательно, сходимость ![]() по вероятности существенно ниже, чем при известном сигнале.
по вероятности существенно ниже, чем при известном сигнале.
Среднее![]() и дисперсия
и дисперсия ![]() определяются выражениями
определяются выражениями
![]() ;
; ![]() (20)
(20)
Заметим, что для алгоритмов минимизации мощности помех с опорным вектором ![]() , потери которого близки к
, потери которого близки к ![]() по отношению к оптимальному алгоритму, среднее
по отношению к оптимальному алгоритму, среднее![]() и дисперсия
и дисперсия ![]() определяются приближенными выражениями
определяются приближенными выражениями
![]() ;
; ![]() , (21)
, (21)
а среднее ![]() при
при ![]() практически не зависит от числа обучающих выборок. Из сравнения дисперсий в (5) и (21) следует, что при совпадении принимаемого сигнала с опорным дисперсия с ростом
практически не зависит от числа обучающих выборок. Из сравнения дисперсий в (5) и (21) следует, что при совпадении принимаемого сигнала с опорным дисперсия с ростом ![]() снижается по закону
снижается по закону ![]() , тогда как при расстройке - значительно медленнее, по закону
, тогда как при расстройке - значительно медленнее, по закону ![]() .
.
Графики зависимости среднего ![]() и дисперсии
и дисперсии ![]() , построенные в соответствии с (20) для фильтра размера
, построенные в соответствии с (20) для фильтра размера ![]() =5 при
=5 при ![]() =1;2;
=1;2;![]() показаны соответственно на рис.3 и рис.4.
показаны соответственно на рис.3 и рис.4.
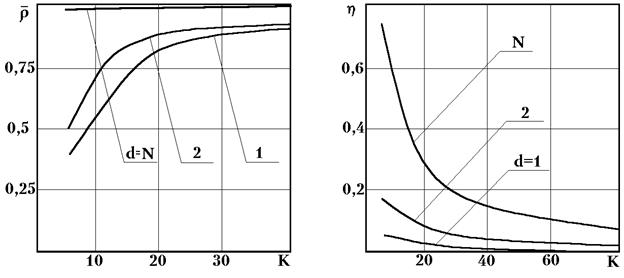
Рис. 3 Рис. 4
Из графиков следует, что при расстройке ![]() имеет место существенное увеличение дисперсии
имеет место существенное увеличение дисперсии ![]() и ее низкая скорость сходимости. При перекрытии каналов по уровню -3 дБ сходимость среднего изменяется незначительно, а дисперсия возрастает почти в 3 раза при
и ее низкая скорость сходимости. При перекрытии каналов по уровню -3 дБ сходимость среднего изменяется незначительно, а дисперсия возрастает почти в 3 раза при ![]() . Для одноканального фильтра минимизации мощности помех сходимость среднего не ухудшается, а дисперсия возрастает на порядок и более. Учитывая при
. Для одноканального фильтра минимизации мощности помех сходимость среднего не ухудшается, а дисперсия возрастает на порядок и более. Учитывая при ![]() близость законов распределения с/п к симметричной форме можно охарактеризовать применимость адаптивных фильтров для обнаружения и оценки параметров. Учет вероятностных характеристик с/п показал, что влияние расстройки параметров незначительно сказывается на эффективности алгоритмов обнаружения сигналов с флюктуирующей амплитудой. Однако для алгоритмов оценки параметров сигнала увеличение дисперсии с/п существенно снижает эффективность измерителей.
близость законов распределения с/п к симметричной форме можно охарактеризовать применимость адаптивных фильтров для обнаружения и оценки параметров. Учет вероятностных характеристик с/п показал, что влияние расстройки параметров незначительно сказывается на эффективности алгоритмов обнаружения сигналов с флюктуирующей амплитудой. Однако для алгоритмов оценки параметров сигнала увеличение дисперсии с/п существенно снижает эффективность измерителей.
Выводы
Проведенные исследования адаптивных фильтров позволили уточнить следующие особенности проектирования систем обработки сигналов с неполностью известными параметрами:
1. Для систем многоканальной обработки при перекрытии каналов по уровню половинной мощности получены сходимость среднего с/п практически не изменяется, а интервальные оценки и дисперсия с/п возрастают в несколько раз.
2. Для одноканальных адаптивных фильтров, не учитывающих закон модуляции полезного сигнала, сходимость среднего с/п практически не зависит от числа обучающих выборок, а дисперсия возрастает на порядок и более.
3. Расстройка принимаемого и опорного сигналов незначительно сказывается на эффективности алгоритмов обнаружения сигналов с флюктуирующей амплитудой, но существенно снижает эффективность алгоритмов оценки параметров сигнала.
The statistical characteristics of the signal using the maximum likelihood estimation covariation matrix while training the filter are analyzed. The influence of the training extracts number on the effectiveness of the useful signal extraction is shown.
1. Монзинго П.А., Миллер Г.У. Адаптивные антенные решётки: введение в теорию: Пер. с англ./ Под ред. В.А. Лексаченко.- М.: Радио и связь, 1986.-448 с.
2. Reed I.S., Mallet J.D., Brennan L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans: AES-10. –1974. –N 6. –p 853-863.
3. Баранов П.Е. Сходимость адаптивных фильтров с произвольным опорным вектором и различными корреляционными матрицами обучающего и обрабатываемого процессов //Изв. вузов СССР: Радиоэлектроника.– 1992. №4.–С.18-23.
4. Boroson D.M. Sample Size Considerations for Adaptive Arrays. IEEE Trans: AES-16. –1980. –N 4. –p 446-851.
5. Справочник по специальным функциям.: Пер. с англ. /Под ред. М.Абрамовица и И.Стиган. - М.: Наука,1979.- 832c.
6. Интегралы и ряды. Прудников А.П., Брычков Ю.А., Маричев О.М.-М.: Наука, 1981.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.