УДК 621.9.06
ИСПОЛЬЗОВАНИЕ НЕЧЕТКОЙ АДАПТИВНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДЛЯ КОМПЬЮТЕРНОГО МОНИТОРИНГА СЕТЬЮ КОТЕЛЬНЫХ УСТАНОВОК
Михайленко В.С., Никольский В.В.
Современные котельные установки для обеспечения жилых домов и промышленных зданий отоплением и горячим водоснабжением оснащаются цифровыми средствами контроля и регулирования. Работа программируемых микроконтроллеров, как составной части, позволяет достичь оптимального поддержания заданных технологических параметров, экономии энергоресурсов, снизить влияние человеческого фактора, а также повысит надежность АСУТП. Развитие промышленных компьютерных систем и специализированного программного обеспечения существенно облегчает работу обслуживающего персонала. Вместе с тем новейшие SCADA системы (Genesis, Trace Mode, Круг и т.д.), на наш взгляд, с развитием области искусственного интеллекта, нуждаются в усовершенствовании. А именно, для повышения эффективности в управлении группой модульных или районных котельных, нами предлагается оснастить программные пакеты дополнительными функциями по выработке экспертных заключений, самостоятельной адаптации при изменении структуры котельной, а также производстве самонастройки и самообучения в нештатных ситуациях. Наличие экспертной адаптивной системы с выше перечисленными функциями существенно уменьшит проблему по содержанию большого количества обслуживающего персонала и сведет вероятность отказов оборудования к минимуму.
В качестве выбора научного направления для разработки экспертной системы нами предлагается использовать опыт ученых, работающих в области нечеткого управления [1-3]. Известно, что нечеткие микроконтроллеры успешно имитируют действие эксперта-оператора при регулировании объектом в неопределенных условиях, там, где типовые регуляторы не достигают требуемого качества переходного процесса [4-5]. Оснащение фаззи-контроллеров дополнительным блоком адаптации (рис. 1) позволит, по нашему мнению, существенно повысить эффективность в управлении котельной установкой.
Целью данной работы является разработка нечеткого алгоритма для регулятора и его блока адаптации, а также компьютерная апробация нечеткой АСР с объектом 2-го порядка с запаздыванием (условная математическая модель водогрейного котла в виде инерционных звеньев) в условиях неопределенности (с вводом дополнительного звена и изменения значения передаточной функции, без изменения правил в базах знаний нечеткой АСР), которые позволят определить, насколько нечеткая система оказывается чувствительной к изменениям в структуре объекта в значительном диапазоне, и как будут отличаться её характеристики по сравнению с классическими регуляторами.
Впервые создание адаптивной нечеткой системы управления, которая производит коррекцию правил нечеткого регулятора исходя из информации о качестве процесса, было предложено Р. Алиевым, С. Ассилиани и Т. Просиком [1].
Так для поддержания заданного качества процессов управления при изменении параметров объекта, выходящих за допустимые пределы, и предотвращения аварийных ситуаций необходимо корректировать параметры регулятора, т. е. его базу знаний.
Система управления с адаптивным регулятором представляет собой двухуровневую систему с нечетким регулятором в цепи обратной связи и нечетким контуром адаптации на втором уровне. Принцип работы адаптивного нечеткого регулятора заключается в том, что при значительном изменении параметров объекта управления сложившейся текущей ситуации, определяемой е и е*, база знаний выбирает действие, уже не обеспечивающее необходимое качество регулирования.
Получая информацию об изменении параметров объекта, содержащихся в ситуации (е, е*), верхний контур формирует такую последовательность правил, которые приводят к желаемой переходной характеристике системы.
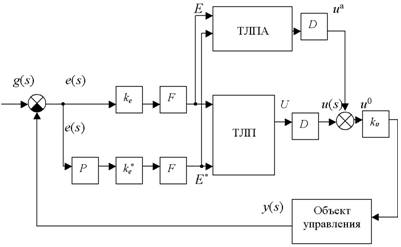
Рис. 1. Схема нечеткого адаптивного регулятора
На рис. 1 выходная переменная объекта регулирования технологического процесса y(s) сравнивается с заданным значением g(s), сигнал рассогласования e(s) поступает в масштабный элемент с коэффициентом ke и в дифференциатор Р, вход которого умножается на ke* в масштабном элементе. Блоки F предназначены для преобразования текущих значений рассогласования и производной от рассогласования (скорости изменения рассогласования) в их лингвистические значения (фаззификации).
Нечеткие термы e(s)* , e*(s)* поступают в главный элемент нечеткого регулятора - базу знаний (БЗ) или ТЛП (таблицу лингвистических преобразований). База знаний (БЗ) строится на основе продукционной модели, имеющей конструкцию вида ЕСЛИ…ТО ….
Найденное лингвистическое значение управления после преобразования его в четкое значение u(s) в блоке D (этап дефаззификации) и умножения на масштабный коэффициент ku поступает на исполнительные устройства объекта управления. Масштабные коэффициенты ke, ke*, ku являются параметрами универсальных множеств Е, Е* и U, на которых, исходя из условий конкретного управляемого объекта, определяются нечеткие множества e(s)1*, e*(s)*, u(s)*. Например, если универсальным множеством Е является диапазон (-10, - 9, …, +9, +10) и требуется, чтобы рассогласование в системе находилось в диапазоне (-1; +1), тогда ke берется равным 10,0, с тем, чтобы нечеткий регулятор мог использовать всё универсальное множество, на котором определяются нечеткие множества.
Для нечеткого регулятора, представленного на рис. 1, любое правило в БЗ может быть представлено в виде:
ЕСЛИ (e(s) есть e(s)1*) И (e(s)* есть e*(s)1*) ТО (u(s) есть u(s)1*), где e(s), e(s)*, u(s) - переменные; e(s)1*, e*(s)1*, u(s)1* - лингвистические значения переменных. Или ЕСЛИ ошибка е* ПБ (положительно большая), И скорость изменения ошибки е*’ ПБ, ТО переходный процесс системы удовлетворительный и адаптация не нужна ИНАЧЕ,
ЕСЛИ ошибка е* ПМ (положительно малая), И скорость изменения ошибки е*’ ПБ, ТО переходный процесс системы неудовлетворительный и необходима отрицательно средняя (ОС) адаптация управления ua, или
Rka = Ei ![]() Ej
Ej ![]() Uae,
Uae,
i = ![]() , j =
, j = ![]() , e =
, e = ![]() , k=
, k=![]() (1)
(1)
где Rka – нечеткое описание правила в пространстве Ei ![]() Ej
Ej ![]() Uae; Ei, Ej, Uae – соответственно, нечеткие подмножества ошибки, скорости изменения
ошибки и адаптации управления.
Uae; Ei, Ej, Uae – соответственно, нечеткие подмножества ошибки, скорости изменения
ошибки и адаптации управления.
Полученные нечеткие описания правил формируют матрицу нечетких отношений (МНО):
Ra = Ra1
![]() Ra2
Ra2 ![]() …Rak
…Rak
![]() …Ran4,
k =
…Ran4,
k = ![]() . (2)
. (2)
Назначением матрицы Ra является выработка адаптирующего воздействия при выходе траектории переходного процесса за допустимые границы. Рядом ученых отмечено, что предполагаемая БЗ достаточно универсальна и может быть применима к объектам различного порядка [3].
Для программирования НР в (Simulink) проведены этапы фаззификации ошибки, скорости ее изменения и управляющего воздействия (рис. 2 - 4). Введены следующие обозначения: NB – отрицательно большая, NS – отрицательно средняя, NM – отрицательно малая, Z – нулевая, PM –положительно малая PS – положительно средняя, Pe – положительная большая.
Правила для нечеткого регулятора составлены в виде следующих высказываний:
ЕСЛИ e(t) ОМ, И e*(t) ОМ, ТО u(t) ОМ, ИНАЧЕ
ЕСЛИ e(t) ОБ, И e*(t) ОБ, ТО u(t) ОБ и т.д.
В основе их разработки лежит опыт известных ученых [2, 3, 5].
Для апробации полученной нечеткой системы управления, анализа ее работы в условиях неопределенности и сравнении с типовым ПИ-регулятором (PI- контроллер) проведен компьютерный эксперимент.
В качестве математической модели объекта для виртуального эксперимента нами выбрано инерционное звено второго порядка с запаздыванием (рис. 6) на основании [6]. Отметим, что желаемый вид переходного процесса можно получить в процессе выбора типа и количества функций принадлежности (терм-множеств). Их характеристики определяют размер БЗ, при этом, чем больше правил, тем успешнее может быть переходный процесс.
Как отмечалось выше, процедура адаптации управления заключается в корректировке некоторого правила из БЗ основного контура нечеткого регулятора, приведшего к текущей неудовлетворительной реакции объекта управления. Рассмотрим эту процедуру подробнее. Допустим, что некоторое правило из БЗ основного контура нечеткого регулятора явилось причиной текущего неудовлетворительного (по БЗ контура нечеткой адаптации) выхода объекта. Нечеткое описание этого правила составляет тензор:
R n-k = En-
k ![]() En- k
En- k ![]() Un-k, (3)
Un-k, (3)
где En-k =
![]() {en-k}; E* n-k = F {e* n-k}; Un-k = F {un-k}; n – индекс текущего времени опроса, k – определяется из динамики объекта;
{en-k}; E* n-k = F {e* n-k}; Un-k = F {un-k}; n – индекс текущего времени опроса, k – определяется из динамики объекта; ![]() - оператор
перехода от четкой переменной к нечеткой.
- оператор
перехода от четкой переменной к нечеткой.
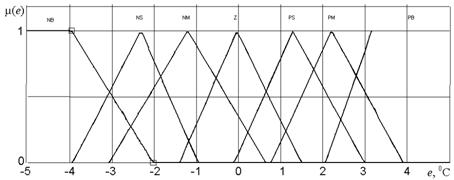
Рис. 2 Функции принадлежности лингвистической переменной “ошибка”
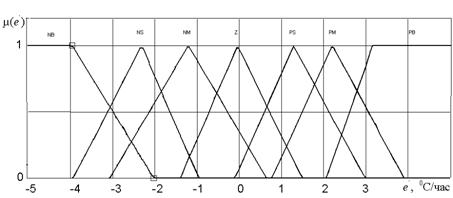
Рис. 3 Функции принадлежности лингвистической переменной
“скорость изменения ошибки”
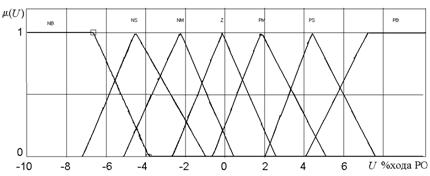
Рис. 4 Функции принадлежности выхода НР
Текущая неудовлетворительная реакция объекта была установлена некоторым правилом из ТЛП (таблицы лингвистических правил) контура адаптации, нечеткое описание которого также составляет тензор:
Rna = En ![]() En
En ![]() Uan. (4)
Uan. (4)
Очевидно, что неудовлетворительное правило должно быть заменено скорректированным:
R’ = En-k ![]() E* n-k
E* n-k ![]() Uн, (5)
Uн, (5)
где Uн = F {un-k+ uan}.
Таким образом, в БЗ основного контура будет занесено новое правило, которое для текущих параметров объекта управления предпочтительнее. Для решения вопроса адаптации управления, соответствующего неудовлетворительному правилу, представляется целесообразным использовать четкое значение Uаn в соответствии со следующим алгоритмом:
u0 = un + uan, (6)
где un = D {Un}; uan = D {Uan}; D – оператор перехода от нечеткой переменной к четкой (дефаззификация).
База знаний контура нечеткой адаптации состоит из 49 правил. Апробация адаптивной нечеткой системы (рис. 5) по каналу задания (g(s)=2,5)) показала, что переходный процесс на выходе адаптивного НР рис. 6, а имеет затухающий вид.
В качестве проверки нашего утверждения об эффективности адаптивной нечеткой системы (АНС) в условиях неопределенности был проведен второй компьютерный эксперимент. Было изменено значение времени интегрирования инерционного звена передаточной функции объекта. Кроме того, во втором эксперименте было добавлено инерционное звено. Таким образом, был увеличен порядок объекта (рис. 5) с помощью переключателя (Manual switch). Анализ переходных процессов АСР (рис. 6, б) показал, что нечеткий контроллер успешно поддерживает заданное значение в отличие от PI – контроллера, переходный процесс которого является расходящимся. Затухающий процесс получен с выхода адаптивного НР. Таким образом, можно сделать вывод, что в условиях стационарности оба регулятора демонстрируют хорошие характеристики.
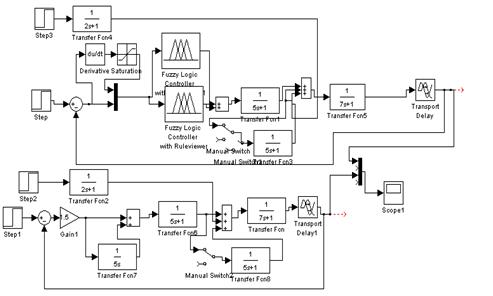
Рис. 5 Структурные схемы нечеткой адаптивной и типовой АСР
а)
б)
Рис. 6 Переходные процессы нечеткой и типовой АСР: а - без звена запаздывания, б - со звеном запаздывания, 1 – ПИ - регулятор, 2 - нечёткий регулятор
Показатели качества переходных процессов ПИ и нечеткого регуляторов (рис. 6, а) представлены в таблице 1 и демонстрируют преимущества нечеткого контроллера.
А переходный процесс типовой АСР (рис. 6, б) - расходящийся, т.е. система неустойчива. В тоже время нечеткий контроллер показывает удовлетворительные характеристики, а его процесс носит апериодический характер (Тр = 80 с; g1(t) = 1,4).
Таблица 1
Показатели качества процессов регулирования
|
показатели |
регуляторы |
||
|
|
ПИ |
нечеткий |
|
|
Tр, с |
85 |
38 |
|
|
ψ |
0,64 |
0,86 |
|
|
g1(t), |
4,5 |
3 |
|
Дальнейшее использование нечетких адаптивных систем регулирования и их встроенная поддержка в SCADA – системы, например TraceMode, позволит эффективно управлять сложным отопительным оборудованием в экономных режимах. Следует отметить, что успешное развитие, в последнее время, адаптивных нейронных нечетких сетей (ANFIS) позволяет производить самообучение системы управления без участия эксперта.
В результате проведенных исследований можно сделать следующие выводы:
- применение нечетких АСР позволяет использовать их для управления информацией качественного характера, при этом нечеткая система оказываются малочувствительной к изменениям в структуре объекта в значительном диапазоне и демонстрируют лучшие характеристики по сравнению с классическими регуляторами;
- значительное изменение параметров объекта управления влечет за собой модификацию управляющих правил БЗ с их последующей корректировкой, что успешно производит адаптивный контур нечеткого регулятора.
The article deals with application of adaptive fuzzy systems control for computer monitoring of boilers equipments. The effects of investigation is elaboration of fuzzy algorithms which have effective regulation in indefinite conditions
1. Алиев Р.А., Церковный А.Э., Мамедова Г.А. Управление производством при нечеткой исходной информации. - М.: Энергоиздат, 1991. – 234 с.
2. Леоненков А. Ю. Нечеткое моделирование в среде Matlab и fuzzyTech. - С-Птб.: БХВ, 2003. ─ 720 с.
3. Нечеткие множества в моделях управления и искусственного интеллекта //Под. ред. Д.А. Поспелова. - М.: Радио и связь, 1982. - 490 с.
4. Нечеткие множества и теория возможностей. Последние достижения // Под ред. Р.Р. Ягера. - М.: Радио и связь, 1986. - 408 с.
5. Борисов А.Н., Алексеев А.В., Меркурьева Г.В. и др. Обработка нечеткой информации в системах принятия решений. - М: Радио и связь, 1999. - 304 с.
6. Дудников Е.Г. Экспериментальное определение динамических характеристик промышленных объектов управления. - М.: Энергия, 1987. – 367 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.