УДК 004.62:004.492
ПРИНЯТИЕ АДАПТИВНОЙ СТРАТЕГИИ ПРИ ФОРМИРОВАНИИ ТРАЕКТОРИИ ОБУЧЕНИЯ В ПРОСТРАНСТВЕ
Носов П.С.
Не смотря на необходимость связи теории и практики, студенты в ходе учебы, часто выбирают собственные приоритеты: либо знания либо умения, и соответственно этому формируют свою траекторию обучения [1]. Данный факт подтверждает то, что студенты адаптируются к существующим условиям обучения в ВУЗах. Сложившаяся ситуация свидетельствует о проблеме независимости теоретических знаний относительно практических умений в учебном процессе [2]. Методы, применяемые для решения данной проблемы в классическом обучении, не позволяют достичь значительного повышения успеваемости в условиях автоматизации [3].
В статье предложен подход позволяющий адаптировать процесс обучения, к студентам управляя фактором времени учебного занятия на основе меры неопределенности прогноза по Ягеру.
Построение траектории обучения студента учитывает следующие факторы:
– уровень знаний студента ![]() ;
;
– уровень умений студента![]() ;
;
– время, потраченное на выполнение задачи ![]() ,
, ![]() .
.
Кроме этого, в области построения траектории располагаются два концентрических эллипса, которые разбивают ее на соответствующие участки:
– участок допустимых результатов Qpr;
– участок цели со стороны ЛПР и учебного процесса Qp, где ![]() ;
;
– участок недопустимых результатов Qnpr, где ![]() .
.
При этом концентрические эллипсы как направляющие траектории формируется на плоскости контрольных временных срезов с центром в точке пересечения осей знаний и умений (рис.1.). Сама же точка пересечения – порог требования системы (максимальный бал за тест Gp).
Таким образом, плоскость делится на четыре сектора:
1. (![]() ,Gp,,
,Gp,,![]() ) – (теоретик + практик в пределах цели);
) – (теоретик + практик в пределах цели);
2. (![]() ,Gp,
,Gp, ![]() ) – (выраженный практик);
) – (выраженный практик);
3. (![]() ,Gp,
,Gp, ![]() ) – (теоретик + практик сверх цели);
) – (теоретик + практик сверх цели);
4. (![]() ,Gp,
,Gp,![]() ) – (выраженный теоретик);
) – (выраженный теоретик);
В целях диагностики уровня требований ЛПР относительно результатов студента кроме перечисленных характеристик учитывается и потенциал студента. В данном случае рассматривается ситуация, когда студенты преимущественно выполнили задания досрочно (рис.1). При этом предполагается, что за оставшееся время студент мог выполнить дополнительные задания, улучшив свой результат ![]() и
и ![]() .
.
Координаты точки Si (![]() ;
;![]() )определяется на основе расстояний
)определяется на основе расстояний ![]() :
:
![]() ,
, ![]() (1)
(1)
 (2)
(2)
Ввиду того, что тестом не предусматривается достижение результата ![]() , предлагается смоделировать процесс получения бонуса – дополнительных заданий за преждевременный положительный результат. Координата среднего значения по группе Si (40; 45), с учетом бонуса времени относительно
, предлагается смоделировать процесс получения бонуса – дополнительных заданий за преждевременный положительный результат. Координата среднего значения по группе Si (40; 45), с учетом бонуса времени относительно ![]() и
и ![]() :
: ![]() сместиться к точке Si’ (46;64), где
сместиться к точке Si’ (46;64), где
![]() (3)
(3)
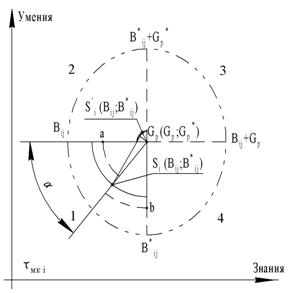
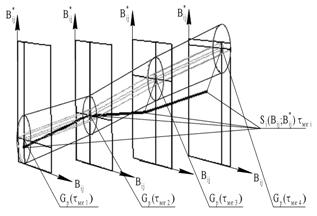
Рис. 1 Принятие решения в условиях бонуса времени
Такое положение предполагает от системы принятия решений интеллектуальной системы управления учебным процессом (ИСУ УП), соответствующей реакции, а именно: используя бонус времени добавить 15 % заданий теоретических и 42 % практических, при этом добавленные теоретические задания должны быть сложнее на 10%, а практические на 15%.
Ситуация обстоит сложнее в обратном случае, когда завышенные требования к выполнению тестового не оставляют бонуса времени. Рассмотрим положение усредненного результата группы Si.
Тогда для принятия рационального решения на следующий этап контроля необходимо учесть значения возможного прогноза в двух вариациях: без принятия решения и с принятиям решения. В свою очередь принятие решений возможно в четырех совместных фазах:
1. Упрощение теоретических заданий ![]() ;
;
2. Усложнение теоретических заданий ![]() ;
;
3. Упрощение практических заданий ![]() ;
;
4. Усложнение практических заданий ![]() .
.
Ввиду того, что рациональное принятие решений на будущем этапе контроля основывается на данных прогноза, то фазы, которые позволят с наименьшей мерой неопределенности определить значение прогноза и будут наиболее рациональными.
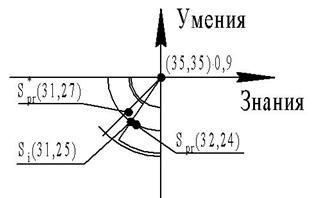
Рис. 2 Отображение оценки Si и принятие решения без бонуса времени
Проведем моделирование меры неопределенности прогноза ![]() по методу Ягера [5]:
по методу Ягера [5]:
 , (4)
, (4)
где ![]() – знание/умение, измененное в результате принятия решения, для чего введем коэффициент нагрузки
– знание/умение, измененное в результате принятия решения, для чего введем коэффициент нагрузки ![]() , где верхняя граница 1,9 принята условно.
, где верхняя граница 1,9 принята условно.
Предположим, в ходе обучения средние результаты студентов группы составили:
|
Вид задания \ этап |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
теория |
13 |
22 |
31 |
46 |
54 |
72 |
89 |
|
практика |
15 |
23 |
25 |
39 |
45 |
63 |
71 |
При этом максимальные требования ИСУ УП к выполнению заданий предполагали следующие показатели:
|
Вид задания \ этап |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
теория |
15 |
25 |
35 |
50 |
60 |
80 |
100 |
|
практика |
20 |
30 |
35 |
55 |
65 |
90 |
100 |
Тогда согласно методу наименьших квадратов, оперируя значениями, полученными на первых двух этапах, построим прогноз без принятия решений и соответственно с принятием решений во всех фазах:
1. Без принятия решений:
|
Вид задания \ прогноз |
3 |
4 |
5 |
6 |
7 |
|
теория |
31 |
44 |
53 |
70 |
88 |
|
практика |
27 |
42 |
50 |
69 |
76 |
При этом мера неопределенности прогноза составила 0,86.
2. Упрощение теоретических заданий:
|
Коэффициент |
Сравнительный результат |
||||
|
0,9 |
32 |
45 |
54 |
72 |
90 |
|
Прогноз после принятия решений |
|||||
|
|
28 |
39 |
47 |
63 |
79 |
При этом мера неопределенности прогноза составила 0,77.
3. Усложнение теоретических заданий:
|
Коэффициент |
Сравнительный результат |
||||
|
1,1 |
39 |
55 |
66 |
88 |
110 |
|
Прогноз после принятия решений |
|||||
|
|
34 |
48 |
58 |
77 |
96 |
При этом мера неопределенности прогноза составила 0,95.
5. Упрощение практических заданий:
|
Коэффициент |
Сравнительный результат |
||||
|
0,9 |
32 |
50 |
59 |
81 |
90 |
|
Прогноз после принятия решений |
|||||
|
|
24 |
38 |
45 |
62 |
69 |
При этом мера неопределенности прогноза составила 0,78.
6. Усложнение практических заданий:
|
Коэффициент |
Сравнительный результат |
||||
|
1,1 |
39 |
61 |
72 |
99 |
110 |
|
Прогноз после принятия решений |
|||||
|
|
29 |
46 |
54 |
75 |
84 |
При этом мера неопределенности прогноза составила 0,95.
Проанализировав полученные результаты можно заключить, что наиболее рациональным является решение 2,4 - упрощение теоретических и практических заданий.
Таким образом, предложенный метод пространственного формирования траектории учебной деятельности студента, позволяет не только получить числовое значение знаний-умений, но и принимать адаптивные решения, определить логику мышления студента в предметной области.
The method of spatial formation of a trajectory of educational activity of the student which allows not only to receive numerical value of knowledge-skills is offered, but also to make adaptive decisions, to define logic of thinking of the student in a subject domain:
1. Машбиц Е.И. Психолого-педагогические проблемы компьютеризации обучения. – М.: Педагогика, 1988.
2. Носов П.С. Використання компонентів мислення експертними системами, як фактору адаптивного впливу в автоматизованих навчальних системах / Носов П.С., Яковенко О.Є., Тонконогий В.М. / Тр. Одес. политехн. ун-та. -Одеса: ОНПУ, 2005. — Спецвип. — С. 101 — 106.
3. Носов П.С. Особливості розробки комп’ютерних тестових методик у адаптивному навчанні // Збірник наукових праць. Педагогічні науки. Випуск 39. – Херсон: Видавництво ХДУ, 2005. — С. 359 – 363.
4. Аверкин А.Н., Головина Е.Ю.,Сергиевский А.Е. Проектирование нечетких регуляторов на основе триангулярных норм // Известия академии наук. Теория и системы управления.-1997 г., № 5, С. 112-118
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.