УДК 681.513.6
ОПРЕДЕЛЕНИЕ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ СИГНАЛОВ МЕТОДОМ АДАПТАЦИИ
Шутеев Э.И., Белокопытов Д.О.
Введение
При измерении характеристик динамических объектов, полученные результаты оказываются зашумленными или искаженными, что в большинстве случаев не позволяет получить результат с требуемой точностью. Связано это с тем, что объекты окружающего мира являются динамическими системами и обладают своими внутренними изменениями, деформациями, колебаниями, а вследствие чего и шумами. В статье рассматривается возможность повышение точности определения параметров сигналов динамических систем при помощи адаптивной фильтрации. Основа метода заключается в том, что система моделирует собственную весовую функцию для каждого нового сигнала.
Адаптивные устройства обработки данных отличаются наличием определенной связи параметров передаточной функции с параметрами входных, выходных, ожидаемых, прогнозируемых и прочих дополнительных сигналов или с параметрами их статистических соотношений, что позволяет самонастраиваться на оптимальную обработку сигналов. В простейшем случае, адаптивное устройство содержит программируемый фильтр обработки данных и блок (алгоритм) адаптации, который на основании определенной программы анализа входных, выходных и прочих дополнительных данных вырабатывает сигнал управления параметрами программируемого фильтра.
Последовательность получения какого-либо параметра динамической системы изображена на рис. 1 [1]. На исследуемый объект, кроме определяемого воздействия, могут действовать и различные внешние факторы среды, которые вносят аддитивную составляющую помехи. Также сам объект, являясь сложной системой, вносит мультипликативную составляющую помехи. Далее уже искаженный физический параметр, определенным способом преобразуется в электрический, затем следует аналогово-цифровое преобразование, приведение полученного значения по заданной функции к нормальному виду.

Рис. 1 Структурная схема получения параметра динамической системы
Постановка задачи
Полученные в результате аналогово-цифрового преобразования и нормализации данные в большинстве случаев не будут пригодны для дальнейшего использования без предварительной обработки, в процессе которой минимизируются всевозможные помехи и шумы. Одним из способов устранения возникших искажений является фильтрация [1,2], при этом необходимо точно знать либо то что требуется получить, либо то что требуется удалить из сигнала. Однако, когда речь идёт о динамических системах заранее предположить что либо точно нельзя, определены только общие черты сигнала и помехи. Поэтому, даже применяя фильтрацию к одному классу динамических систем, в большинстве случаев для получения результата с ожидаемой точностью, не достаточно лишь определить тип фильтрации. Возникает необходимость подстройки фильтра в процессе фильтрации, то есть его адаптации к входному воздействию.
На рис. 2 приведен реальный сигнал, снятый с тензометрического датчика при прохождении через платформу весов железнодорожного состава. Полученная характеристика должна представлять из себя набор прямоугольных импульсов различной амплитуды. На практике, при измерении веса движущихся объектов, на полученную характеристику накладываются различные гармонические колебания, вызванные собственными продольными и поперечными колебаниями объекта.
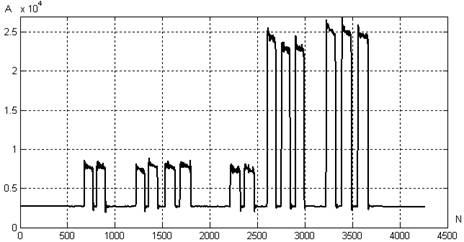
Рис. 2 Диаграмма взвешивания состава
На рис. 3 и рис. 4 изображены увеличенные части рис. 2, это и есть зашумленный сигнал при взвешивании осей тепловоза и вагона.
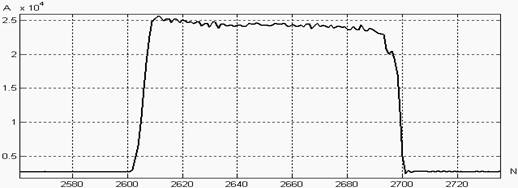
Рис. 3 Зашумленный сигнал (ось тепловоза)
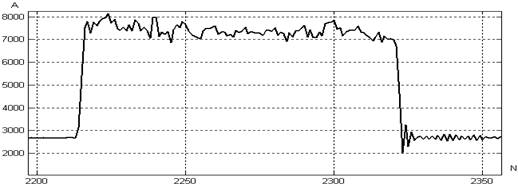
Рис. 4 Зашумленный сигнал (ось вагона)
Задачи такого типа могут быть решены несколькими способами: математическое усреднение (интегрирование), фильтрация низких частот, косинусные окна. В данном случае из перечисленных методов наилучшую точность дает использование косинусных окон, так при измерении веса движущихся объектов погрешность составляет порядка 0.1%. Стационарное взвешивание дает точность на несколько порядков выше, следовательно, актуальной является задача повышения точности и скорости получения параметров динамических систем.
Целью данной работы является поиск алгоритма и структуры системы использующей адаптивную фильтрацию для более точного определения параметров динамических объектов. В результате адаптации есть возможность получения оптимального КИХ-фильтра или окна для последующего синтеза КИХ-фильтров [3]. Целесообразность такого подхода и будет рассмотрена далее.
Описание предложенного адаптивного метода
В рассматриваемом случае динамическая система обладает параметром X0, являющимся постоянным во времени, в течение которого производится наблюдение. Кроме того в системе возникают гармонические составляющие сигнала, искажающие наблюдаемый параметр. На рис. 5 изображен определяемый сигнал X0 и помеха p(t), представляющая собой сумму нескольких гармоник.
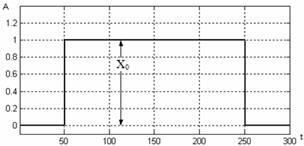
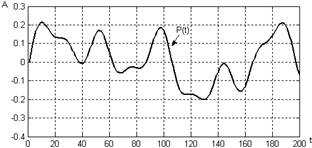
Рис. 5 Параметр системы X0 и шум системы p(t)
При измерении параметра X0 в результате на выходе системы получен зашумленный сигнал x(t), представляющий собой сумму данного параметра и аддитивных составляющих p(t):
|
x(t)= X0+ p(t) |
(1) |
На рис. 6 изображен зашумленный сигнал, из которого необходимо выделить полезную составляющую.
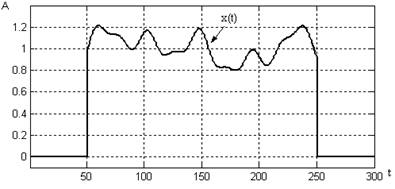
Рис. 6 Зашумленный сигнал
Исходя из метода окон [2], можно использовать ту же формулу для определения постоянной составляющей сигнала, но только в качестве весовых коэффициентов взять коэффициенты КИХ-фильтра, полученного на основе адаптивного фильтра.
Формула определения постоянной составляющей:
|
|
(2) |
Следующая формула получается подстановкой в формулу (2) вместо x(t) формулы (1), и умножением обеих частей уравнения на знаменатель:
|
|
(3) |
Раскрыв в правой части уравнения скобки и учитывая то, что интеграл суммы равен сумме интегралов, а произведение подынтегральной функции на константу равносильно произведению самого интеграла на эту константу, получается:
|
|
(4) |

Следовательно, для выполнения исходной формулы должно выполняться условие:
|
|
(5) |
Формула (5) является условием подавления помехи КИХ-фильтра [1], то есть необходимо выбрать такой КИХ-фильтр, после прохождения через который аддитивная помеха станет близкой к нулю. Такой фильтр можно получить с помощью адаптивной фильтрации, при этом адаптивный фильтр можно адаптировать к любой константе К, соизмеримой по величине с определяемой.
Приступая к моделированию системы известен вид входного воздействия и то, что на него наложена помеха. В состав системы будет входить адаптивный фильтр. Способ включения этого фильтра и тип образцового сигнала необходимо определить в процессе проектирования модели, кроме того необходимо предложить методику определения образцового сигнала для адаптации.
В результате моделирования были исследованы две различные адаптивные схемы позволяющие подавить помеху рис.7 и рис.8. При адаптивном моделировании обязательно требуется образцовый сигнал, а как правило в реальных условиях его нет, поэтому были испробованы различные способы его замены. Так на рис.7. приведена структура одной из наиболее результативных моделей решения проблемы. В приведенной модели адаптивный фильтр включен последовательно с системой, что позволяет в результате адаптации получить обратную модель системы. Образцовый сигнал, необходимый для адаптации фильтра, является константой. Далее полученные в результате адаптации коэффициенты адаптивного фильтра, подставляются в передаточную функцию, в результате чего получается настроенный на определенную помеху неадаптивный фильтр, то есть режекторный КИХ-фильтр. Теперь, пропуская зашумленный сигнал уже через полученный КИХ-фильтр, на выходе получаем достаточно точное подобие исходного чистого сигнала, среднее значение которого и будет соответствовать искомому параметру.
В изображенной на рис. 7 модели, в качестве входного воздействия используются прямоугольные импульсы. С помощью сумматора на них накладываются две гармонические составляющие, с частотами соизмеримыми с реальными помехами. Затем эта смесь пропускается через рекурсивное звено, представленное передаточной функцией. В результате, окончательно искаженный сигнал поступает на вход адаптивного фильтра и параллельно на вход КИХ-фильтра, представленного передаточной функцией. В качестве адаптивного фильтра был выбран фильтра Калмана как наиболее подходящий, так как он предназначен для минимизации дисперсии оценки векторного случайного процесса x(k), изменяющегося во времени следующим образом:
|
x(k+1)= Φ(k)x(k)+v(k), |
(6) |
где Φ(k) — матрица перехода, v(k) — случайный вектор (шум процесса) [4]. Что близко к поставленной задаче. На вход ошибки адаптации фильтра, подается разница между константой и сигналом с выхода фильтра. Полученные же в результате адаптации коэффициенты фильтра, записываются в специальное окно отображения результата и сохраняются в числовом векторе, используемом в дальнейшем для подстановки в передаточную функцию. В окне симулятора Scope отображены интересующие нас сигналы: входной, зашумленный, сигнал ошибки адаптации и отфильтрованный сигнал.
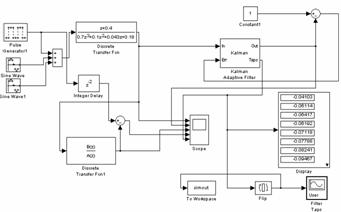
Рис. 7 Модель исследуемой системы
Суть данной модели в том, что конечный результат получается при делении, где делимым является сумма произведений коэффициентов фильтра на соответствующие отсчеты сигнала, а делителем сумма всех коэффициентов фильтра, это отражает следующая формула:
|
|
(7) |
где wai – коэффициенты адаптивного фильтра,
xi – отсчеты сигнала,
X0 – амплитуда зашумленного сигнала.
Модель с параллельно включенным адаптивным фильтром рис.8, полезных результатов не дала, так как в данном случая в результате адаптации получается прямая модель системы. Входное воздействие в виде прямоугольных импульсов подаются на вход рекурсивного звена заданного передаточной функцией и параллельно на вход адаптивного фильтра. В качестве сигнала ошибки для адаптивного фильтра используется разность выходов рекурсивного звена и самого фильтра. В результате адаптации фильтр пытается предсказать следующее значение на выходе рекурсивного звена, при этом адаптивный фильтр становится нерекурсивной моделью рекурсивного звена.
Вернувшись к первой модели и проанализировав получаемые в результате адаптации коэффициенты фильтра, можно сделать вывод, что каждый коэффициент адаптивного фильтра складывается из двух частей, одна из которых служит для нормализации амплитуды входного сигнала к амплитуде образцового, а вторая для удаления искажающей составляющей сигнала. Исходя из этого, можно сделать вывод что первое слагаемое bi изменяется при изменении амплитуды образцового сигнала и пропорциональна этому изменению, а второе является константой ci и зависит лишь от типа помехи.
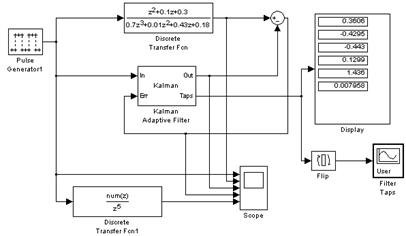
Рис. 8 Модель системы с паралельно включенным адаптивным фильтром
Следовательно, справедливо следующее равенство:
|
|
(8) |

Откуда получается:
|
|
(9) |
|
|
(10) |
Проверив полученное выражение экспериментально и сведя результаты эксперимента в таблицу 1, проанализируем погрешность измерения.
Таблица 1
Результаты эксперимента
|
Входной сигнал |
Образцовый |
b1 |
b2 |
b3 |
b4 |
b5 |
|
|
1 |
K0 |
0 |
-0,00942 |
-0,00938 |
-0,00929 |
-0,00919 |
-0,009 |
|
расчет |
|
-0,00942 |
-0,00934 |
-0,00941 |
-0,00918 |
-0,00906 |
|
|
1 |
K1 |
0,5 |
0,09069 |
0,06823 |
0,05 |
0,03556 |
0,02422 |
|
расчет |
|
0,09069 |
0,06823 |
0,05 |
0,03556 |
0,02422 |
|
|
1 |
K2 |
1 |
0,1908 |
0,1458 |
0,10941 |
0,0803 |
0,0575 |
|
расчет |
|
0,190804 |
0,145868 |
0,109332 |
0,080336 |
0,057512 |
|
|
1 |
K3 |
2 |
0,391 |
0,301 |
0,2281 |
0,16986 |
0,1241 |
|
1 |
K4 |
5 |
0,9917 |
0,7667 |
0,5843 |
0,4384 |
0,3238 |
Из таблицы видно, что исходное предположение полностью подтвердилось. То есть коэффициенты являются суммой двух слагаемых, одно из которых константа, а второе пропорционально образцовому сигналу.
Выводы
Анализируя предыдущие исследования в этой области, можно сделать выводы, что задачи такого типа решаются с помощью фильтрации. При этом построение фильтра ведется с использование весовых функций, чаще всего косинусных: Хеннинга, Хэмминга или Блэкмена [5]. Что же касается адаптивной фильтрации, то в литературе описано несколько основных направлений её использования. Однако, адаптивная фильтрация, как таковая, в чистом виде в данном случае не применима. Поэтому, для достижения поставленной цели в этой работе объединены такие области цифровой обработки сигналов, как адаптивная фильтрация и синтез фильтров с использованием весовых функций.
В предложенном методе адаптации получается собственная весовая функция для каждого конкретного случая. Описанный метод используется для определения амплитуды зашумленного сигнала, при этом важность уделяется точности определения амплитуды, а не скорости получения результата, так как данный метод весьма энергоемкий и требует больших программных затрат.
Данный метод может применяться при определении параметров динамических систем. Как правило, определяемый параметр на некотором промежутке времени являются постоянными, но измерить его точно не удается из-за помех различного рода, вызванных например колебаниями всего объекта или его частей. Решить данную задачу можно измерив на определенном промежутке времени искомый параметр, а затем полученную последовательность данных обработать предложенным методом. Такие задачи, как уже было сказано, возникают при измерении веса: движущихся объектов, на движущихся объектах, цистерн с колеблющейся жидкостью, подвешенных грузов и т.д.
Преимуществом данного метода является возможность его применения при периодах помехи, соизмеримых с длиной выборки полезного сигнала. В таких случаях погрешность метода адаптации составляет порядка 0.1%, а метода косинусных окон около 0.5%. В остальных же случаях предложеный метод, дает результат более высокой точностью порядка 0.01%, хотя есть возможность, в каждом конкретном случае, при некоторой доработке устройства адаптации получить результат на порядок лучше. Недостаток метода в его некоторой трудоемкости реализации. Хотя при современых скоростях обработки данных, во многих случаях его трудоемкость не будет существеным недостатком и не скажется на времени получения конечного результата.
The possibility increase exactness of determination permanent of the signals got at measuring the dynamic systems parameters is reflected in the article. In the method uses adaptive filtration. A method allows getting a weight function for every concrete signal. A capable of working model is offered and the results got in the process of design are reflected.
1. А.И. Солонина, Д.А. Улахович, С.М. Арбузов. Основы цифровой обработки сигналов: Курс лекций. – СПб.: БХВ-Петербург, 2003. – 615 с.
2. Сергиенко А.Б. Цифровая обработка сигналов: Учебник для вузов – СПб.: Питер, 2002. – 608 с.
3. Уйдров Б., Стирнз С. Адаптивная обработка сигналов: пер. с англ. – М.: Радио и связь, 1989. – 440 с.
4. Сергиенко А.Б. Алгоритмы адаптивной фильтрации: особенности реализации в MATLAB //Математика в приложениях. – 2003. – №1(1). – С.18-28.
5. Айфичер Э., Джервис Б. Цифровая обработка сигналов: Практический подход, 2-е издание. : Пер. с англ. – М.: Издательский дом «Вильямс», 2008. – 992 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.