УДК 519.7
ОБ ОПТИМИЗАЦИИ КОЭФФИЦИЕНТА УСИЛЕНИЯ
В АДАПТИВНОЙ СИСТЕМЕ С ОБРАТНОЙ МОДЕЛЬЮ
Клименко А.К.
1. Постановка проблемы и ее связь с практическими заданиями. Известны автоматизированные технологические объекты (АТО), в которых управление осуществляется по циклически повторяющимся программам. Примерами таких АТО являются металлорежущие станки с программным управлением и станы горячей прокатки. Управляющие программы готовятся в условиях неполной информации об объекте управления и возмущающих воздействиях. Поэтому требуется корректировка управляющих программ как во время их разработки, так и в процессе эксплуатации. Системы, в которых осуществляется такая корректировка, называются системами с самоустанавливающейся программой [1], самонастраивающимися системами «от детали к детали» [2,3] и адаптивными системами [4]. В данной статье будем называть их системами с адаптивной корректировкой управляющих программ.
При корректировке текущей программы используется информации об ошибках в предыдущих циклах ее воспроизведения. Эти ошибки суммируются с исходной программой при помощи дискретного интегратора.
Корректировка программ осуществляется по формуле
![]() ,
, ![]() , ν=1,2,…, (1)
, ν=1,2,…, (1)
где n – дискретное время, ν – номер цикла воспроизведения программы, N – количество кадров в программе,![]() – корректирующий сигнал,
– корректирующий сигнал, ![]() – коэффициент усиления в контуре адаптивной корректировки,
– коэффициент усиления в контуре адаптивной корректировки, ![]() – ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
– ошибка предшествующего цикла воспроизведения управляющей программы, f{·} – функция, определяемая этой ошибкой и обеспечивающая сходимость процесса ее минимизации.
Ошибки изготовления деталей состоят из регулярной и случайной составляющих. Последняя является центрированной аддитивной. Источником ее могут выступать как процесс обработки деталей сложной формы, так и ошибки автоматического измерения размеров последних.
Если статистические характеристики регулярной составляющей возмущающего воздействия и случайной помехи стационарны, целью адаптации является формирование корректирующего сигнала, обеспечивающего сведение к нулю регулярной составляющей ошибки. Для этого требуется сходимость процесса (1). На обеспечение сходимости и на ее скорость влияет коэффициент усиления ![]() в контуре адаптации.
в контуре адаптации.
Имеется также проблема подстройки коэффициента усиления для минимизации ошибки воспроизведения программы в условиях, когда соотношение между регулярной и случайной составляющими могут медленно, но непредсказуемо изменяться во времени. Примером может служить случай, когда требуется корректировка программы обработки деталей по мере износа инструмента.
В этом случае требуется такая подстройка коэффициента усиления, которая минимизирует среднеквадратичную ошибку непосредственно следующего воспроизведения программы.
Анализ известных решений. Вопрос влияния коэффициента усиления на сходимость процесса адаптации рассматривался в ряде публикаций.
В [4] рассматривается сходимость процесса (1) при отсутствии случайных помех. Показано, что при выборе оптимального коэффициента усиления для полной корректировки программы число циклов самонастройки должно быть равно числу тактов дискретного времени в программе, что для практики недопустимо.
В работе [5] исследованы системы программного управления с непрерывным представлением управляющей информации. Показано, что процесс самонастройки в этом случае сходится только в области низких частот. Ошибка управления уменьшается при первых циклах воспроизведения программ и неограниченно растет в последующих циклах. Поэтому самонастраивающиеся системы этого типа не нашли практического применения, но полученные теоретические результаты применимы и для систем с дискретным представлением управляющей информации.
В [6] предлагается способ выбора оптимального коэффициента усиления в контуре самонастройки при управлении в условиях случайных возмущающих воздействий. Недостаток способа – для определения желаемого коэффициента усиления предварительно требуется большое количество воспроизведений управляющей программы с регистрацией ошибок и статистической обработкой результатов. На практике это означает производственные потери.
В решении задачи обеспечения сходимости процесса адаптации в условиях помех оказалось эффективным применение математического аппарата - метода стохастической аппроксимации. Обзор метода приведен в [7]. Рекомендации по его использованию даны в [3]. Проблемы обеспечения сходимости порождаются тем обстоятельством, что условия сходимости для регулярной и случайной составляющих ошибки различны. Как следует из [3,7], для обеспечения сходимости процесса (1) в условиях, когда регулярная и случайная составляющие возмущающего воздействия стационарны, коэффициент усиления должен удовлетворять требованиям:
![]() , (2)
, (2)
![]() (3)
(3)
Условие (2) относится к регулярной составляющей ошибки, а условие (3) – к случайной составляющей. Выполнение последнего требует бесконечного числа циклов корректировки, что на практике нежелательно.
Как известно [8], применение обратных моделей (ОМ) динамических объектов создает предпосылки для решения многих задач в области управления. Использование ОМ АТО оказалось эффективным и в задаче обеспечения сходимости регулярной составляющей процесса (1). Это показано в работе [9]. Достоинством использования ОМ АТО является то, что, в случае отсутствия случайной помехи, регулярная составляющая ошибки воспроизведения программы полностью устраняется после одного цикла ее корректировки. В источнике [10] предложено техническое решение ОМ, пригодное для использования в системе с адаптивной корректировкой управляющих программ, а в (11) приведено математическое обоснование этого решения.
Эффективность использования ОМ в цепи адаптации теряется при работе в условиях случайных возмущающих воздействий. Например, если регулярная составляющая отсутствует, а случайная имеется, корректировка программы с выполнением условий (2) и (3) порождает появление регулярной составляющей. Ею становится случайная составляющая, зарегистрированная при предыдущем воспроизведении программы и введенная в дискретный интегратор.
В указанных работах не рассматривался вопрос подстройки коэффициента усиления в случае, когда соотношение между регулярной и случайной составляющими возмущающего воздействия и порождаемые ими ошибки изменяются во времени.
Не предложено и способа экономичного (в смысле количества наблюдений) статистического анализа ошибок предшествующих воспроизведений программы для использования в задаче ускорения сходимости процесса (1).
Постановка задач. Для пояснения постановки задач в данной работе на рис.1 приведена структурная схема системы с адаптивной корректировкой управляющих программ. Символами на схеме обозначены: УП – управляющая программа, АТО – автоматизированный технологический объект, ОМ – обратная модель, Д – дискретный интегратор, БСА – блок статистического анализа. Работа системы состоит в следующем. Предполагается, что АТО является односвязным непрерывным объектом, но все приведенные на схеме сигналы рассматриваются в дискретном времени (являются решетчатыми функциями). Управляющая программа x(n) циклически повторяется и не изменяется от цикла к циклу. Она же служит и для измерения ошибок обработанных деталей. Продолжительность программы – N тактов дискретного времени. Ошибки могут быть измерены как одновременно с выполнением программы (на прокатном стане), так и в промежутках между циклами (металлорежущие станки).
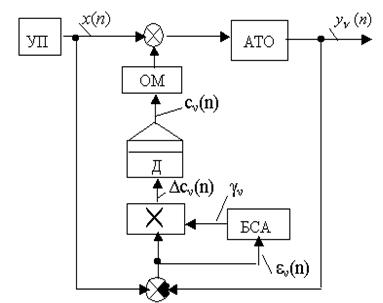
Рис.1. Структурная схема системы
Входящая в систему ОМ выполнена таким образом, что импульсная переходная функция комплекса «ОМ-АТО» удовлетворяет требованиям:
![]() (4)
(4)
БСА предназначен для нахождения оптимального ![]() , обеспечивающего минимум среднеквадратичной ошибки воспроизведения программы после ее корректировки по результатам анализа ошибок предыдущих воспроизведений.
, обеспечивающего минимум среднеквадратичной ошибки воспроизведения программы после ее корректировки по результатам анализа ошибок предыдущих воспроизведений.
ОМ, обеспечивающая получение импульсной переходной функции (4) в комплексе «ОМ-АТО», отличается от идеальной временным запаздыванием на один такт дискретного времени. Поэтому зарегистрированный сигнал ошибки подается но вход дискретного интегратора с опережающим временным сдвигом на ту же величину, т.е.
![]() . (5)
. (5)
В дальнейшем будем пользоваться следующим выражением для общей ошибки воспроизведения программы ![]() -го цикла:
-го цикла:
![]() ,
, ![]() , (6)
, (6)
где ![]() и
и ![]() – соответственно регулярная и случайная составляющие.
– соответственно регулярная и случайная составляющие.
В качестве статистических характеристик регулярной и случайной составляющих зарегистрированных ошибок принимаются их среднеквадратичные значения на интервале цикла. Поскольку случайная составляющая принимается аддитивной, между средним квадратом общей ошибки и средними квадратами ее составляющих справедливо соотношение:
![]() ,
, ![]() .
.
Целью работы является нахождение способа определения коэффициента усиления ![]() , обеспечивающего минимум среднеквадратичного значения ошибки последующего воспроизведения программы:
, обеспечивающего минимум среднеквадратичного значения ошибки последующего воспроизведения программы: ![]() .
.
Для достижения этой цели ставятся следующие задачи:
- нахождение зависимости оптимального коэффициента усиления от средних квадратов составляющих ошибки предыдущих воспроизведений программы, т.е. от ![]() и
и ![]() ;
;
- определение указанных средних квадратов на основании статистического анализа зарегистрированных ошибок двух предыдущих циклов воспроизведения программы.
При решении этих задач принимается, что статистические характеристики регулярной и случайной составляющих ошибки могут изменяться во времени, но настолько медленно, что на протяжении двух соседних циклов являются постоянными.
Изложение результатов исследования. Сначала находим выражение для ошибки ![]() воспроизведения управляющей программы. Оно отличается от выражения (6) из-за введения поправки (5) в дискретный интегратор:
воспроизведения управляющей программы. Оно отличается от выражения (6) из-за введения поправки (5) в дискретный интегратор:
![]() , (7)
, (7)
где ![]() — приращение ошибки, порождаемое этой поправкой.
— приращение ошибки, порождаемое этой поправкой.
Учитывая, что поправка (5) проходит через систему “ОМ—АТО”, описываемую импульсной переходной функцией (4), и меняет знак в элементе сравнения, для приращения ошибки находим выражение с использованием формулы свертки :
 (8)
(8)
В дальнейших выкладках учитываем следующие обстоятельства.
Регулярная составляющая ошибки в соседних циклах воспроизведения программы не успевает измениться, т.е.
![]() , (9)
, (9)
а случайная составляющая аддитивна и удовлетворяет требованиям:
![]() , (10)
, (10)
![]() . (11)
. (11)
Выражение для ошибки (7) после преобразований с использованием зависимостей (8, 9, 10) получит вид:
![]() ,
,
а ее средний квадрат на интервале [0,N] с учетом аддитивности помехи и справедливости выражения (11) :
![]() =
= ![]()
![]()
![]() .
.
Продифференцировав это выражение по ![]() , приравняв производную нулю и решив полученное уравнение, находим выражение для оптимального коэффициента
, приравняв производную нулю и решив полученное уравнение, находим выражение для оптимального коэффициента ![]() в функции вероятностных характеристик регулярной и случайной составляющих ошибки управления в предыдущих циклах:
в функции вероятностных характеристик регулярной и случайной составляющих ошибки управления в предыдущих циклах:
 (12)
(12)
Таким образом, оптимальный коэффициент усиления в рассматриваемой адаптивной системе равен отношению среднего квадрата регулярной составляющей ошибки к сумме средних квадратов регулярной и случайной составляющих.
Теперь рассмотрим задачу определения численных значений входящих в выражение (12) квадратов при работе адаптивной системы по рис.1. Эта задача выполняется с помощью блока статистического анализа БСА следующим образом.
Регистрируются ошибки двух циклов воспроизведения программы. В промежутках между ними изменения в дискретный интегратор не вносятся. Ошибки имеют вид
![]() ,
, ![]() ,
,
а между их параметрами справедливы соотношения:
![]() .
.
С учетом этих зависимостей формируются сумма и разность зарегистрированных ошибок:
![]()
![]()
![]() ,
,
и вычисляются их средние квадраты:
 . (13)
. (13)
Решив полученную систему уравнений, находим выражения для средних квадратов регулярной и случайной составляющих ошибки:
![]()
Подставив полученные значения средних квадратов в формулу (12), и, используя обозначения ![]() и
и ![]() из системы (13), приходим к выражению для оптимального коэффициента усиления в адаптивной системе с ОМ:
из системы (13), приходим к выражению для оптимального коэффициента усиления в адаптивной системе с ОМ:
 . (14)
. (14)
Таким образом, для определения оптимального коэффициента усиления достаточно иметь зарегистрированные ошибки двух циклов воспроизведения программы. В промежутках между этими циклами в дискретный интегратор не вносятся изменения.
Экспериментальная часть. Если в двух циклах воспроизведения программы ошибки управления отсутствуют, т.е. ![]() , тогда выражения (12) и (14) превращаются в неопределенность вида
, тогда выражения (12) и (14) превращаются в неопределенность вида ![]() . В этом случае не требуется корректировка программы и коэффициент усиления должен приниматься равным нулю.
. В этом случае не требуется корректировка программы и коэффициент усиления должен приниматься равным нулю.
Из анализа формул (12) и (14) следует, что величина получаемого коэффициента усиления может изменяться в пределах от 0 до 1. Это совпадает с полученным в работе [6] результатом. Если в зарегистрированных ошибках управления присутствует только случайная составляющая (т.е. ![]() ), то вычисленный коэффициент усиления равен нулю и процесс адаптации заканчивается без внесения поправки в дискретный интегратор. В случае же присутствия только регулярной составляющей, т.е. при
), то вычисленный коэффициент усиления равен нулю и процесс адаптации заканчивается без внесения поправки в дискретный интегратор. В случае же присутствия только регулярной составляющей, т.е. при ![]() , коэффициент усиления равен единице и процесс адаптации заканчивается после единственного внесения в дискретный интегратор значения зарегистрированной ошибки
, коэффициент усиления равен единице и процесс адаптации заканчивается после единственного внесения в дискретный интегратор значения зарегистрированной ошибки ![]() . Такие ситуации могут возникать как при первых циклах воспроизведения программы, так и при любых последующих.
. Такие ситуации могут возникать как при первых циклах воспроизведения программы, так и при любых последующих.
Если же в ошибках управления имеются одновременно регулярная и случайная составляющие, выполняется процесс адаптации (1) с соблюдением условий сходимости (2,3). При этом обеспечивается оптимальность каждой корректировки программы в смысле минимума среднеквадратичной ошибки.
Выводы по результатам исследований. Использование ОМ совместно с предлагаемым способом подстройки коэффициента усиления обеспечивает оптимальную корректировку программы в любых циклах ее воспроизведения. Возмущающие воздействия при этом могут быть как стационарными, так и медленно изменяющимися во времени. Для получения статистических данных об ошибках достаточно проведения двух экспериментальных проигрываний программы.
Эти качества рассматриваемого способа подстройки коэффициента усиления расширяют возможности практического применения адаптивных систем в условиях случайных ошибок измерений. На металлорежущих станках с программным управлением обрабатываются детали сложной формы. Как показано в [12], имеется возможность автоматически измерять их, не снимая со станка после обработки, но при этом существенное значение имеют случайные ошибки измерений. Проблемы случайных ошибок автоматического измерения имеют место и на прокатных станах, где объект во время измерения находится в движении, а на его поверхности имеется окалина.
Полученные результаты могут быть использованы при разработке систем автоматизированного проектирования и отладки программ автоматического управлении дискретно-непрерывными технологическими процессами.
The problem of definition of an optimum of forcing factor in system with adaptive updating cyclically repeating controlling influences is considered. In a circuit of adaptation the inverse model is used. An object of control is subject of handicaps influences which parameters can be both constant, and changing in time.
1. Перельман И.И. Регулирование по принципу самоустанавливающейся программы // Автоматика и телемеханика. – 1958, №9. – С. 813-823.
2. Кобринский А.Е., Колискор А.Ш., Левковский Е.И., Попов В.Е., Сергеев В.И. Самонастраивающаяся система программного управления станками // Вестник АН СССР. – 1965, №9. – С. 52-57.
3. Цыпкин Я.З. Адаптация и обучение в автоматических системах. – М.: Наука, 1968. – 400 с.
4. Перельман И.И. Самонастраивающаяся программа как средство для получения заданной реакции на выходе линейного динамического объекта регулирования // Автоматика и телемеханика. – 1958. – №4. – С.312-320.
5. Андрейчиков Б.И. Динамическая точность систем программного управления станками. – М.: Машиностроение, 1964. – С. 242-267.
6. Перельман И.И. Выбор оптимального коэффициента усиления в системе регулирования по самоустанавливающейся программе // Автоматика и телемеханика. –1959, №2. – С.184-191.
7. Логинов Н.В. Методы стохастической аппроксимации // Автоматика и телемеханика. – 1966, №4. – С. 185-203.
8. Костенко Ю.Т., Любчик Л.М. Системы управления с динамическими моделями. Харьков: Основа, 1996.– 212 с.
9. Клименко А.К. О сходимости процессов алаптации в цифровых системах программного управления станками // Сб. «Адаптивные системы управления металлорежущими станками» / Под ред. А.Е. Кобринского, Сер. С-1. — М.: НИИМАШ, 1971.— С.58-67
10. Клименко А.К., Клименко В.Г. Корректирующее устройство. – Авт. свид. СССР №1406563.– Бюллетень изобретений, №24, 1988.
11. Клименко А.К. Обратная модель для решения задач управления и контроля качества / Методы менеджмента качества // Надежность и контроль качества. – 1999 – №8. – С. 32-39.
12. Клименко А.К., Кожушков Н.П. Об автоматическом измерении на станках с программным управлением величин погрешности обработки деталей // В сб. “Числовые системы автоматического управления машинами”. – К.: Техніка, 1975.– С. 83-86.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.