УДК 681.5
ОБРАТНАЯ МОДЕЛЬ ДЛЯ РЕШЕНИЯ ЗАДАЧ В СИСТЕМАХ
С МНОГОСВЯЗНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
1. Введение. Обратные модели динамических объектов требуются при решении ряда задач в системах автоматического управления и в системах идентификации.
Идеальная обратная модель реального динамического объекта, как известно [1], физически неосуществима. На аналоговых средствах автоматики и вычислительной техники удавалось создавать лишь приближенные обратные модели и только для объектов, описываемых уравнениями невысокого порядка. С развитием компьютерных технологий стало возможным создание дискретных приближенных обратных моделей для объектов произвольного порядка. Для динамических объектов (ДО), имеющих один вход и один выход, найдена возможность создания обратной модели, близкой к идеальной и отличающейся от неё только временным запаздыванием. Это удалось сделать благодаря использованию информационной технологии, основанной на численных методах решения задач на ЭВМ и не требующей трудоёмкой аналитической работы.
Одной из областей применения обратных моделей являются измерительные системы. Наиболее важным требованием к средствам измерения является обеспечение ими высокой статической точности и быстродействия. В многоканальных динамических системах, не имеющих перекрёстных связей, это требование может быть удовлетворено за счёт применения обратной модели в каждом канале измерения. В системах же с перекрестными связями необходимо применение обратной модели многосвязного объекта, которая, помимо точности и быстродействия, должна обеспечить и полную автономность каналов измерения. Примером может служить проблема разработки системы оперативного диагностирования взрывоопасных газовых смесей при производстве, хранении, транспортировке и использовании жидкого водорода в качестве энергоносителя. В этом случае необходимо применение измерительных устройств (датчиков), количество которых равно числу контролируемых компонентов газовой смеси. Каждый из датчиков обладает своей инерционностью и может одновременно реагировать на несколько газов с различными коэффициентами. Низкое быстродействие диагностирующего комплекса может явиться причиной технологической катастрофы, а ложное срабатывание системы защиты из-за перекрёстных помех между каналами - привести к производственным потерям, порождаемым прерыванием технологического процесса. Применение обратной модели многосвязного объекта позволяет обеспечить высокое быстродействие диагностирующего комплекса с предотвращением ложных срабатываний.
В данной статье рассматривается задача осуществления обратной модели (ОМ) многосвязного ДО, в качестве примера которого выступает измерительная система. Для решения задачи предполагается использование компьютерной информационной технологии.
2. Анализ известных технических решений. Решение задачи создания ОМ многосвязного объекта базируется на использовании уже известного технического решения дискретной ОМ для односвязного ДО. Идея построения ОМ непрерывного объекта в виде замкнутой дискретной системы была защищена авторским свидетельством на изобретение [2]. Теоретическое обоснование этого решения изложено в работе [3]. ОМ является дискретным устройством, конструктивными параметрами которого выступают дискретность времени Т и конструктивный временной сдвиг τ. Объект, для которого создается ОМ, предполагается непрерывным, линейным, стационарным и устойчивым. В качестве исходного математического описания односвязного ДО при конструировании его ОМ используется его переходная характеристика (ПХ) ![]() , именуемая также и кривой переходного процесса.
, именуемая также и кривой переходного процесса.
Для осуществления ОМ составляется математическое описание ДО, который сдвинут в сторону опережения и физически осуществим. ДО описывается импульсной переходной функцией (ИПФ) ![]() в дискретном времени. Числовой массив ИПФ может быть получен из кривой переходного процесса ДО h(t):
в дискретном времени. Числовой массив ИПФ может быть получен из кривой переходного процесса ДО h(t):
![]() ,
, ![]() , (1)
, (1)
где t – непрерывное время,
T – дискретность (шаг квантования) времени,
n – дискретное время (![]() ,
, ![]() –моменты непрерывного времени, кратные Т),
–моменты непрерывного времени, кратные Т),
N – время затухания переходного процесса ,
τ – конструктивный временной сдвиг в сторону опережения.
Для обеспечения физической осуществимости и работоспособности создаваемой ОМ ИПФ ДО (1) должна удовлетворять требованиям:
![]() , (2)
, (2)
![]() , (3)
, (3)
![]() , (4)
, (4)
![]() ,
,
где ![]() – установившееся значение ПХ ДО.
– установившееся значение ПХ ДО.
Техническое решение приближенной ОМ на средствах дискретной вычислительной техники получено путем использования известной [4] формулы свертки, связывающей входной и выходной сигналы ДО через его ИПФ. Эта формула может быть представлена в виде
![]() , (5)
, (5)
где х(n) – выходной сигнал ДО, снимаемый в дискретные моменты времени n, ![]() – значение непрерывного входного сигнала ДО в предшествующие моменты времени.
– значение непрерывного входного сигнала ДО в предшествующие моменты времени.
Выходной сигнал (5) ДО может быть представлен в виде суммы двух составляющих:
![]() ,
,
где переменная ![]() является полезной составляющей, достаточной для нахождения выходного сигнала
является полезной составляющей, достаточной для нахождения выходного сигнала ![]() , а переменная
, а переменная
![]() (6)
(6)
является помехой.
Приведенная в [3] ОМ осуществляет нахождение сигнала ![]() после устранения помехи
после устранения помехи ![]() . Эта ОМ описывается математической зависимостью:
. Эта ОМ описывается математической зависимостью:
 ,
, ![]() , (7)
, (7)
где c(n), y(n) соответственно входной и выходной сигналы ОМ,
![]() – конструктивный временной сдвиг, величина которого не может быть больше единицы.
– конструктивный временной сдвиг, величина которого не может быть больше единицы.
ОМ, описываемая формулой (7), при реализации представляет собой замкнутую импульсную систему без непрерывной части. Функциональная схема ее может быть приведена к виду, показанному на рис.1. При ее работе из входного сигнала ОМ ![]() вычитается помеха
вычитается помеха ![]() , определяемая по формуле (6) в предположении, что вычисленные ранее и хранящиеся в буферной памяти значения выходного сигнала ОМ
, определяемая по формуле (6) в предположении, что вычисленные ранее и хранящиеся в буферной памяти значения выходного сигнала ОМ ![]() соответствуют искомым значениям входного сигнала ДО
соответствуют искомым значениям входного сигнала ДО ![]() , т.е.
, т.е.
![]() ,
, ![]() .
.![]()
![]()
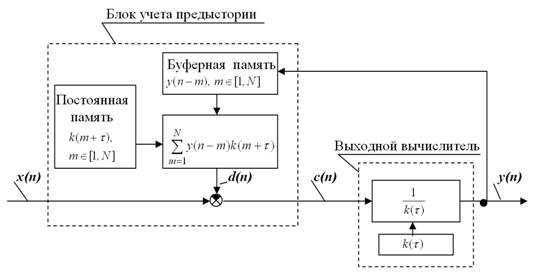
Рис.1 Структурная схема ОМ односвязного объекта
Таким образом, рассмотренная ОМ односвязного объекта работает в дискретном времени и отличается от идеальной временным запаздыванием ![]() . Аналогичная задача стоит и при создании ОМ многосвязного объекта. При ее создании предполагается использовать описанные технические решения односвязной ОМ.
. Аналогичная задача стоит и при создании ОМ многосвязного объекта. При ее создании предполагается использовать описанные технические решения односвязной ОМ.
3. Исходные данные и постановка задачи. Рассматриваем задачу создания обратной модели многосвязного динамического объекта (МДО), имеющего ![]() связей "вход-выход" при
связей "вход-выход" при ![]() . В качестве исходного математического описания каждого канала связи выступает его ПХ в непрерывном времени
. В качестве исходного математического описания каждого канала связи выступает его ПХ в непрерывном времени ![]() , где символами
, где символами ![]() и j обозначены соответственно номера входов и выходов каналов (
и j обозначены соответственно номера входов и выходов каналов (![]() ). Создаваемая ОМ МДО работает в дискретном времени. МДО является непрерывным, но может быть описан в дискретном времени и представлять собой систему числовых массивов ИПФ его каналов связи:
). Создаваемая ОМ МДО работает в дискретном времени. МДО является непрерывным, но может быть описан в дискретном времени и представлять собой систему числовых массивов ИПФ его каналов связи:
![]() ,
, ![]() ,
, ![]() ,
,
где g - дробная часть дискретного времени,
N - время затухания ИПФ (![]() при
при ![]() ).
).
Полагаем также, что каждый канал связи МДО является устойчивым линейным динамическим звеном, а его ИПФ удовлетворяет требованиям, аналогичным требованиям (2), (3) и (4) к ИПФ однофазного объекта:
![]() при
при ![]() ,
,
![]() при
при ![]() и
и ![]() , (8)
, (8)
где t - конструктивная постоянная величина временного сдвига внутри шага квантования дискретного времени ![]() . Эту величину дальше будем называть также и временным запаздыванием, а соответствующие ей значения ИПФ будем обозначать символом
. Эту величину дальше будем называть также и временным запаздыванием, а соответствующие ей значения ИПФ будем обозначать символом ![]() . Будем считать, что величина t одинакова для всех каналов связи МДО.
. Будем считать, что величина t одинакова для всех каналов связи МДО.
Поступающие на входы МДО и не поддающиеся наблюдению сигналы обозначим символами ![]() , а наблюдаемые на выходах МДО сигналы – символами
, а наблюдаемые на выходах МДО сигналы – символами ![]() , где
, где ![]()
Соотношения между выходными и входными сигналами МДО в смещённые моменты времени могут быть определены с использованием известной [8] формулы свертки:
![]() ,
, ![]() , (9)
, (9)
где ![]() – наблюдаемый сигнал на j-ом выходе,
– наблюдаемый сигнал на j-ом выходе,
![]() – ненаблюдаемый сигнал на i-ом входе.
– ненаблюдаемый сигнал на i-ом входе.
Из этого выражения видно, что каждый из наблюдаемых на выходе МДО сигналов является суммой реакций каналов связи на каждый из входных сигналов в текущем и в предшествующих моментах дискретного времени. Целью создания обратной модели МДО будем рассматривать решение задачи нахождения ненаблюдаемых входных сигналов ![]() посредством обработки получаемой информации о выходных сигналах
посредством обработки получаемой информации о выходных сигналах ![]() . При этом будем предполагать, что, как и в случае [3] с односвязным объектом, ОМ МДО будет отличаться от идеальной только временным запаздыванием t, величина которого определяется выполнением условия (8).
. При этом будем предполагать, что, как и в случае [3] с односвязным объектом, ОМ МДО будет отличаться от идеальной только временным запаздыванием t, величина которого определяется выполнением условия (8).
Для формулирования постановки задачи составляем изображённую на рис. 2 инструментальную схему, включающую в себя последовательно соединённые МДО и ОМ. При этом полагаем, что, как и односвязная ОМ, многосвязная ОМ также содержит блок учета предыстории. Кроме того, в многосвязную ОМ дополнительно включен блок развязки каналов. На входы ОМ подаются снимаемые с выходов МДО сигналы ![]() , порождаемые входными сигналами
, порождаемые входными сигналами ![]() . Задачу будем считать решённой, если ОМ обеспечивает получение на её выходах сигналов
. Задачу будем считать решённой, если ОМ обеспечивает получение на её выходах сигналов ![]() , равных по величине входным сигналам МДО
, равных по величине входным сигналам МДО ![]() , которые предшествовали текущему моменту времени
, которые предшествовали текущему моменту времени ![]() на величину t :
на величину t :
![]() . (10)
. (10)
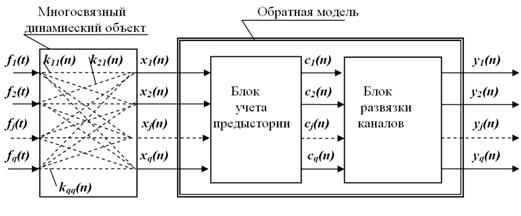
Рис.2. Инструментальная схема для создания ОМ многосвязного объекта
Эта задача сводится к решению двух подзадач:
- определить в выходном сигнале каждого канала МДО последствия воздействия входных сигналов всех каналов в каждом из предшествующих моментов времени и устранить эти последствия;
- исключить из выходных сигналов каждого канала МДО перекрёстные помехи со стороны остальных каналов в текущий момент дискретного времени.
Для решения этих подзадач в структуре ОМ согласно рис.2 требуется разработка математических описаний блока учёта предыстории и блока развязки каналов.
4. Решение задачи. Для выполнения решения задачи будем исходить из математического описания МДО в виде формулы свертки (9). Поскольку мы полагаем, что выходные сигналы МДО снимаются в дискретные моменты времени ![]() без временного сдвига
без временного сдвига ![]() , выражение (9) необходимо преобразовать. Для этого заменяем переменную n+g на переменную
, выражение (9) необходимо преобразовать. Для этого заменяем переменную n+g на переменную ![]() и придаем переменной g постоянное значение g = t. Описание выходных сигналов МДО получает вид:
и придаем переменной g постоянное значение g = t. Описание выходных сигналов МДО получает вид:
![]() .
.
Разложим полученное выражение на две составляющие:
![]() , (11)
, (11)
где
![]() (12)
(12)
![]() . (13)
. (13)
Переменная ![]() представляет собой помеху, порождаемую предысторией. Для обеспечения возможности её вычисления по формуле (12) в блоке учёта предыстории необходимо иметь буферную память с хранением предшествующих значений входных сигналов МДО. Информацией для заполнения буферной памяти служат выходные сигналы ОМ в предположении, что в её работе обеспечивается выполнение условия (10).
представляет собой помеху, порождаемую предысторией. Для обеспечения возможности её вычисления по формуле (12) в блоке учёта предыстории необходимо иметь буферную память с хранением предшествующих значений входных сигналов МДО. Информацией для заполнения буферной памяти служат выходные сигналы ОМ в предположении, что в её работе обеспечивается выполнение условия (10).
После определения по формуле (12) значений ![]() в каждом текущем такте дискретного времени можно находить численные значения переменной
в каждом текущем такте дискретного времени можно находить численные значения переменной ![]() , используя полученное из (11) соотношение
, используя полученное из (11) соотношение
![]() . (14)
. (14)
Если выполнены вычисления по формулам (12) и (14), то выражение (13) можно представить в виде системы линейный алгебраический уравнений, в которой полученные численные значения ![]() ,
, ![]() выступают свободными членами, а искомыми переменными являются входные сигналы МДО
выступают свободными членами, а искомыми переменными являются входные сигналы МДО ![]() в текущий момент дискретного времени:
в текущий момент дискретного времени:
 . (15)
. (15)
Решение системы уравнений (15) в каждом такте дискретного времени обеспечивается при выполнении условия (10) в работе ОМ.
А теперь рассмотрим схемную реализацию ОМ с использованием приведенных выше соотношений. Структурная схема такой ОМ изображена на рис.3.
ОМ представляет собой многосвязную замкнутую дискретную следящую систему. Выходными сигналами её являются искомые величины входных сигналов МДО по рис.2 с временным запаздыванием согласно условию (10). Окружностями на схеме обозначены сумматоры, у которых зачернённые сектора обозначают операцию вычитания. Буферная память, блок 1 постоянной памяти, блок вычисления поправок и сумматоры выполняют функцию блока учёта предыстории в схеме ОМ по рис.2. В буферной памяти хранятся вычисленные значения сигналов ![]() , а в блоке 1 постоянной памяти - численные значения ИПФ каналов связи МДО с временным сдвигом:
, а в блоке 1 постоянной памяти - численные значения ИПФ каналов связи МДО с временным сдвигом:![]() ,
, ![]() . В блоке вычисления поправок выполняется операция (12), а в сумматорах определяются свободные члены
. В блоке вычисления поправок выполняется операция (12), а в сумматорах определяются свободные члены ![]() для системы уравнений (15). Завершающей операцией в работе ОМ является развязка каналов ОМ. Она сводится к решению системы уравнений (15), постоянные коэффициенты которой
для системы уравнений (15). Завершающей операцией в работе ОМ является развязка каналов ОМ. Она сводится к решению системы уравнений (15), постоянные коэффициенты которой ![]() хранятся в блоке 2 постоянной памяти.
хранятся в блоке 2 постоянной памяти.
ОМ, структурная схема которой изображена на рис. 3, может быть реализована на широко известных технических, программных или программно-технических средствах вычислительной техники. Так, например, для решения системы алгебраических уравнений может быть использован пакет прикладных программ Mathcad.
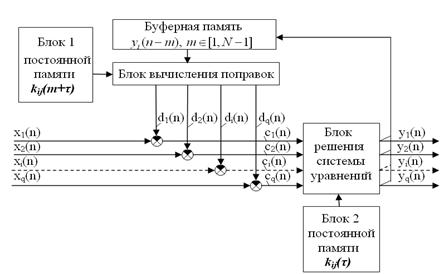
Рис.3 Структурная схема ОМ многосвязного объекта
Рассмотрим пример работы ОМ по рис.3 в комплексе "МДО - ОМ" по рис.2.
Полагаем, что предначальные условия процесса были нулевыми, т.е. до нулевого момента времени отсутствовали сигналы на входах и выходах МДО, а ячейки буферной памяти были пусты. В момент появления первых сигналов ![]() на входах ОМ поправки на предысторию ещё отсутствуют и эти сигналы проходят без коррекции на входы блока решения системы алгебраических уравнений (15), с выходов которого в буферною память поступают первые результаты вычислений. Они представляют собой численные значения входных сигналов МДО
на входах ОМ поправки на предысторию ещё отсутствуют и эти сигналы проходят без коррекции на входы блока решения системы алгебраических уравнений (15), с выходов которого в буферною память поступают первые результаты вычислений. Они представляют собой численные значения входных сигналов МДО ![]() . По ним немедленно вычисляются поправки на предысторию по формуле (12), которые используются в следующем такте дискретного времени для выполнения операции (14). Дальше работа ОМ продолжается аналогичным образом, но уже с учётом предыстории.
. По ним немедленно вычисляются поправки на предысторию по формуле (12), которые используются в следующем такте дискретного времени для выполнения операции (14). Дальше работа ОМ продолжается аналогичным образом, но уже с учётом предыстории.
5. Экспериментальная проверка. Проверка работоспособности ОМ по рис.3 выполнена следующим образом. Была построена инструментальная схема по рис.2. в предположении, что МДО существует, но только на одном из его входов сигнал отличен от нуля. При этом на всех его выходах, благодаря выполнению условия (8), сигналы отличны от нуля. При решении этой задачи многосвязная ОМ функционирует аналогично односвязной, изображенной на рис.1, благодаря чему упрощаются вычислительные операции. Так, например, формула вычисления поправки на предысторию (12) упрощается до формулы (6), а система алгебраических уравнений (15) имеет только одно ненулевое решение. Результаты эксперимента не зависят от выбранного номера входного канала МДО. Поскольку ОМ является линейной системой, в ней действует принцип суперпозиции. Поэтому она может функционировать независимо от количества сигналов на входах МДО, а работа по каждому из входов является автономной.
Структурная схема комплекса "МДО-ОМ", как это показано на рис. 4, имеет вид инвариантных друг относительно друга информационных каналов. При этом каждый канал представляет собой динамическое звено чистого временного запаздывания на величину t и описывается передаточной функцией ![]() , где z - комплексная переменная. Входные сигналы МДО
, где z - комплексная переменная. Входные сигналы МДО ![]() являются непрерывными функциями времени, а выходные сигналы МО
являются непрерывными функциями времени, а выходные сигналы МО ![]() являются «решетчатыми функциями», т.е. существуют только в дискретные моменты времени. Выходные сигналы МО повторяют входные сигналы МДО с временным запаздыванием согласно условию (10).
являются «решетчатыми функциями», т.е. существуют только в дискретные моменты времени. Выходные сигналы МО повторяют входные сигналы МДО с временным запаздыванием согласно условию (10).
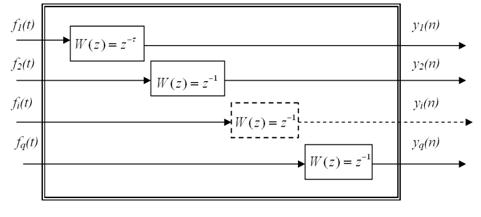
Рис.4 Структурная схема комплекса «МДО - ОМ»
6. Заключение. Рассматриваемая ОМ является замкнутой динамической системой. Основными параметрами, определяющими её устойчивость и динамические показатели качества, являются дискретность времени Т и выбранная величина временного запаздывания t.
О влиянии указанных параметров на свойства односвязной ОМ исследования были проведены с публикацией полученных результатов. В работе [5] исследовано влияние конструктивных параметров ОМ на ее устойчивость, а в работе [6] рассмотрен вопрос обеспечения желаемых показателей качества в одном из классов адаптивных систем посредством оптимизации параметров используемой ОМ. Указанные исследования были выполнены для случая, когда в инструментальной схеме односвязный динамический объект подключен к выходу его ОМ.
Что касается влияния конструктивных параметров многосвязной ОМ на ее устойчивость и получаемые свойства при подключении ее к МДО согласно рис.2, то требуется проведение дополнительных исследований. В частности, при этом необходимо сформулировать показатели качества создаваемой многосвязной ОМ.
Описанная ОМ может быть использована в многосвязных динамических системах для решения задач как идентификации, так и автономного или комплексного управления.
ЛИТЕРАТУРА
1. Петров Б.Н., Кухтенко А.И. Теория проектирования инвариантных систем. Сб.: Современные методы проектирования систем автоматического управления / Под ред. Б.Н. Петрова, В. Б. Солодовникова, Ю. И. Топчеева. - М. : Машиностроение, 1967. - С. 18-78.
2. Клименко А.К., Клименко В.Г. Корректирующее устройство. – Авт. свид. СССР №1406563.– Бюллетень изобретений, №24, 1988.
3. Клименко А.К. Обратная динамическая модель для решения задач управления и контроля качества // Методы менеджмента качества. - 1999. - N. 8 - С. 32-39.
4. Цыпкин Я.3. Теория линейных импульсных систем. - М. : Физматгиз, 1965. - С. 269.
5. Клименко А.К. О влиянии конструктивных параметров обратной модели на ее устойчивость // Автоматика. Автоматизация. Электротехнические комплексы и системы (ААЭКС). – 2005, №2. – С. 52-57.
6. Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью // Автоматика. Автоматизация. Электротехнические комплексы и системы (ААЭКС). – 2009, №1. – С. 157-165.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Информационно-измерительные системы
Ковальов О.І. Вимірювання у процесно-орієнтованих стандартахПолякова М.В., Ищенко А.В., Худайбердин Э.И. Порогово-пространственная сегментация цветных текстурированных изображений на основе метода JSEG
Дзюбаненко А. В. Организация компьютерных систем для анализа изображений
Гордеев Б.Н., Зивенко А.В., Наконечный А.Г. Формирование зондирующих импульсов для полиметрических измерительных систем
Богданов А.В., Бень А.П., Хойна С.И. Релаксация обратного тока диодов Шоттки после их магнитно-импульсной обработки (МИО)
Тверезовский В.С., Бараненко Р.В. Проектирование измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Оптимизированная модель измерителя доб-ротности варикапов
Руднєва М.С., Кочеткова О.В., Задорожній Р.О. Принципи побудови оптимальної структури інформаційно-вимірювальної системи геометричних розмірів об’єктів в діапазоні від 1 нм до 1000 нм
Биленко М.С., Рожков С.А., Единович М.Б. Идентификация деформаций пе-риодических структур с использованием систем технического зрения
Рашкевич Ю.М., Ковальчук А.М., Пелешко Д.Д. Афінні перетворення в модифікаціях алгоритму RSA шифрування зображень
Дидык А.А., Фефелов А.А, Литвиненко В.И., Шкурдода С.В., Синяков Ф. В. Классификация масс-спектров с помощью кооперативного иммунного алгоритма
Завгородній А.Б. Порівняльне дослідження твердотільних і рідиннофазних об'єктів методом газорозрядної візуалізації
Голощапов С.С., Петровский А.В., Рожко Ж.А., Боярчук А.И. Измерение доб-ротности колебательного контура на основе метода биения частот
Кириллов О.Л., Якимчук Г.С. Диагностирование критерия безопасности при заполнении замкнутых объемов СПЖ косвенным методом
Долина В.Г. Проблеми підвищення точності рефрактометра на основі прозорих порожнистих циліндрів.
Самков О.В., Захарченко Ю.А. Застосування алгоритму клонального відбору для побудови планів модернізації авіаційної техніки
Попов Д.В. Метод формування регламентів технічного обслуговування повітряних суден
Казак В.М., Чорний Г.П., Чорний Т.Г. Оцінювання готовності технічних об’єктів з урахуванням достовірності їх контролю
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования цифрового измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования устройства для разбраковки варикапов по емкостным параметрaм и добротности
Сосюк А.В. Інтелектуальний автоматизований контроль знань в системах дистанційного навчання
Соколов А.Є. Деякі аспекти систезу комп’ютеризованої адаптивної системи навчання
Полякова М.В., Волкова Н.П., Іванова О.В. Сегментація зображень стохастичних текстур амплітудно-детекторним методом у просторі вейвлет-перетворення
Луцкий М.Г., Пономаренко А.В., Филоненко С.Ф. Обработка сигналов акустической эмиссии при определении положения сквозных дефектов
Литвиненко В.И., Дидык А.А., Захарченко Ю.А. Компьютерная система для решения задач классификации на основе модифицированных иммунных алгоритмов
Лубяный В.З., Голощапов С.С. Прямоотсчетные измерители расхождений емкостей
Беляев А.В. Построение навигации для иерархических структур в WEB-системах и системах управления WEB-сайтом
Терновая Т.И., Сумская О.П., Слободянюк И.И., Булка Т.И. Контроль качества тканей специального назначения с помощью автоматических систем.
Шеховцов А.В. Інформаційний аспект: розпізнавання образів індивідуума.
Полякова М.В. Определение границ сегмента упорядоченной текстуры на изображении с однородным фоном с помощью многоканального обнаружения пачки импульсов.
Литвиненко В.И. Прогнозирования нестационарных временных рядов с помощью синтезируемых нечетких нейронных сетей
Ковриго Ю.М., Мисак В.Ф., Мовчан А.П., Любицький С.В. Автоматизована система діагностики генераторів електростанцій
Браїловський В.В., Іванчук М.М., Ватаманюк П.П., Танасюк В.С. Керований детектор імпульсного ЯКР спектрометра
Забытовская О.И. Построение функции полезности по экспериментальным данным.
Шиманські З. Апаратні засоби сегментації мовного сигналу
Хобин В.А., Титлова О.А. К вопросу измерения парожидкостного фронта в дефлегматоре абсорбционно-диффузионной холодильной машины (АДХМ)
Фефелов А. А. Использование байесовских сетей для решения задачи поиска места и типа отказа сложной технической системы
Слань Ю. М., Трегуб В. Г. Оперативна нейромережна ідентифікація складних об’єктів керування
Ролик А.И. Модель управления перераспределением ресурсов информационно-телекоммуникационной системы при изменении значимости бизнес-процессов
Кириллов О.Л., Якимчук Г.С., Якимчук С.Г. Изучение электрического поля с помощью датчика измерителя электростатического потенциала на модели замкнутого металлического объема
Грицик В.В. Застосування штучних нейронних мереж при проектуванні комп’ютерного зору.
Гасанов А.С. Информационные технологии построения систем прогнозирования отказов
Шеховцов А.В., Везумский А.К., Середа Е.С. Алгоритм сжатия информации без потерь: модифицированный алгоритм LZ77
Ходаков В.Е., Жарикова М.В., Ляшенко Е.Н. Методы и алгоритмы визуализации пространственных данных на примере моделирования распространения лесных пожаров.
Полякова М.В., Крылов В.Н. Обобщённые масштабные функции с компактным носителем в задаче сегментации изображений упорядоченных текстур. – C. 75 – 84.
Полторак В.П., Дорогой Я.Ю. Система распознавания образов на базе нечеткого нейронного классификатора.
Литвиненко В.И. Синтез радиально-базисных сетей для решения задачи дистанционного определения концентрации хлорофилла.
Бражник Д.А. Управление совмещением изображения объекта в сцене и эталонного изображения.
Бабак В.П., Пономаренко А.В. Локализация места положения сквозных дефектов по сигналам акустической эмиссии.
Мороз В. В. R-D проблема и эффективность систем сжатия изображений.
Крылов В.Н., Полякова М.В., Волкова Н.П. Контурная сегментация в пространстве гиперболического вейвлет-преобразования с использованием математической морфологии.
Квасников В.П., Баранов А.Г. Анализ влияния дестабилизирующих факторов на работу биканальной координатно-измерительной машины.
Казак В.М., Гальченко С.М., Завгородній С.О. Аналіз можливості застосування імовірнісних методів розпізнавання для виявлення пошкоджень зовнішнього обводу літака.
Тищенко И.А., Лубяный В.З. Управление коммутационными процессами в интегрированных сетях связи.
Корниенко-Мифтахова И.К.,Филоненко С.Ф. Информационно-измерительная система для анализа характеристик динамического поведения конструкций.
Тверезовский В.С., Бараненко Р.В. Модель измерителя емкости с линейной шкалой измерений.
Полякова М.В., Крылов В.Н. Мультифрактальный метод автоматизированного распознавания помех на изображении.
Рожков С.О., Федотова О.М. Алгоритм розпізнавання дефектів тканин для автоматичної системи контролю якості.
Бражник Д.А. Использование проективного преобразования для автоматизации обнаружения объектов.
Ходаков В.Є., Шеховцов А.В., Бараненко Р.В. Математичні аспекти створення автоматизованої системи „Реєстр виборців України”