УДК 620.179:534.6
ОБРАБОТКА СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ ПРИ ОПРЕДЕЛЕНИИ ПОЛОЖЕНИЯ СКВОЗНЫХ ДЕФЕКТОВ
Луцкий М.Г., Пономаренко А.В., Филоненко С.Ф.
Введение
Сквозные дефекты, возникающие в продуктопроводах, являются дефектами, которые могут не приводить к разрушению продуктопроводов. Однако они являются причиной утечки транспортируемых газовых и жидких сред. Для их обнаружения, как отмечено в работе [1], используются два основных метода - низкочастотный акустический метод и метод акустической эмиссии. Применение данных методов базируется на обработке временной задержки прихода сигналов на датчики, установленные на продуктопроводе. Временная задержка определяется по анализу взаимной корреляционной функции (ВКФ). Различие используемых методов (низкочастотный акустический метод и метод акустической эмиссии) заключается в различии частотных диапазонов анализируемых сигналов. При этом метод акустической эмиссии (АЭ) основан на том, что неровности сквозных дефектов, сложность их геометрии и другие факторы приводят к возникновению высокочастотного акустического излучения или излучения сигналов АЭ.
И все же наибольшее распространение имеет низкочастотный акустический метод [2, 3]. Это обусловлено простотой методик регистрации сигналов, распространяющихся по продуктопроводу и относительной помехозащищенностью. В тоже время, наличие различных влияющих факторов (неравномерность физико-механических характеристик материалов, дефекты структуры, дисперсия звука и т.д.) приводят к сложному, изрезанному характеру ВКФ, неустойчивости основного всплеска ВКФ и т.д. Для повышения достоверности определения места положения сквозных дефектов используются различные методы [4-8]. Например, частотная фильтрация, т.е. выбор полосы частот для обработки сигналов, поступающих с приемных датчиков. Используемые и разрабатываемые методы направлены на получение статистической устойчивости основного всплеска ВКФ. Однако из-за сложной формы ВКФ, даже при статистической устойчивости ее основного всплеска, временное положение пика основного всплеска может изменяться. Это, безусловно, будет приводить к ошибкам определения места положения сквозного дефекта.
Устранение или уменьшение данной ошибки, как показано в работе [1], возможно при условии обработки временного положения энергетического центра тяжести основного всплеска, который при цифровой обработке сигналов рассчитывается согласно выражения вида
![]() , (1)
, (1)
где ![]() - k-ый отсчет амплитуды принятого сигнала в момент времени аналого-цифрового преобразования
- k-ый отсчет амплитуды принятого сигнала в момент времени аналого-цифрового преобразования ![]() ;
; ![]() - временной интервал дискретизации входного сигнала;
- временной интервал дискретизации входного сигнала; ![]() -чувствительность аналого-цифрового преобразователя на единицу младшего разряда;
-чувствительность аналого-цифрового преобразователя на единицу младшего разряда; ![]() - цифровой код k-го отсчета амплитуды на выходе аналого-цифрового преобразователя; n – количество отсчетов амплитуды на интервале действия сигнала.
- цифровой код k-го отсчета амплитуды на выходе аналого-цифрового преобразователя; n – количество отсчетов амплитуды на интервале действия сигнала.
С учетом ![]() и
и ![]() выражение (1) будет иметь вид
выражение (1) будет иметь вид
![]() =
= ![]() . (2)
. (2)
Использование временного положения энергетического центра тяжести пикового сигнала ВКФ, безусловно, повышает достоверность определения положения сквозного дефекта. Это обусловлено тем, что центр тяжести есть единственный и однозначно определяемый математически.
В тоже время, продуктопроводы имеют не только линейный размер (протяженность или длину), но и диаметр или, условно говоря, “толщину”. Образующиеся сквозные дефекты могут располагаться в любом месте по толщине продуктопровода по отношению к линии, соединяющей приемные датчики. Такое расположение сквозного дефекта, с учетом неоднородности физико-механических характеристик материалов продуктопроводов, различного рода дефектов, дисперсия скорости звука и других факторов приводит к возникновению фазовых сдвигов и трансформации ВКФ. Это будет влиять на достоверность и точность определения положения течей в продуктопроводах.
В работе будет показано, что расположение течей по толщине продуктопровода приводит к возникновению ошибок, которые могут быть учтены, как систематические ошибки. Так же будет показано, что смещение сквозного дефекта по толщине продуктопровода приводит к видоизменению и трансформации ВКФ, когда пиковый сигнал сдвигается в область отрицательных амплитуд. При этом инверсия отрицательных амплитуд ВКФ и обработка пикового сигнала позволяет уменьшить ошибки определения места положения сквозного дефекта в продуктопроводах при вытекании транспортируемых сред.
Результаты исследований
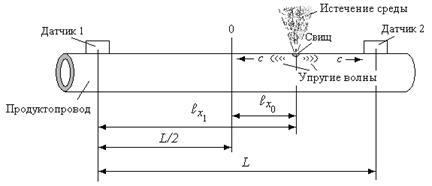
Допустим на продуктопроводе расположены два датчика, расстояние между которыми составляет L (рис.1, а).
а
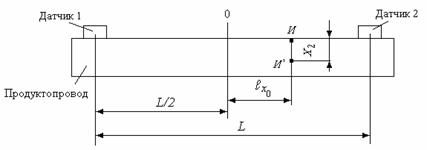
б
Рис. 1 Схемы для расчета места положения сквозного дефекта по временной задержке прихода сигналов на датчики: а – при расположении источника акустического излучения (свища) на линии, соединяющей приемные датчики; б – при расположении источника акустического излучения (свища) по толщине (глубине) продуктопровода. И – источник излучения
В промежутке между ними существует сквозной дефект, который является источником акустического излучения. Место положение сквозного дефекта по часовой задержке прибытия сигналов на датчики, которая устанавливается по ВКФ, определяется двумя путями. При расчетах один из датчиков принимается как базовый для построения ВКФ, например, датчик номер два. Первый путь – относительно датчика 1 (рис.1, а), в соответствии с выражением
![]() , (2)
, (2)
где ![]() - расстояние от первого датчика до источника излучения (рис.1, а); L – расстояние между датчиками;
- расстояние от первого датчика до источника излучения (рис.1, а); L – расстояние между датчиками; ![]() - временная задержка прибытия сигналов, которая определяется по ВКФ при базовом датчике 2; с – скорость распространения звука в материале продуктопровода.
- временная задержка прибытия сигналов, которая определяется по ВКФ при базовом датчике 2; с – скорость распространения звука в материале продуктопровода.
Второй путь – относительно начала координат “0”, который располагается в середине расстояния между датчиками (рис.1, а), в соответствии с выражением
![]() , (3)
, (3)
где ![]() - расстояние от начала координат “0” до источника излучения (рис. 1, а).
- расстояние от начала координат “0” до источника излучения (рис. 1, а).
При этом временная задержка ![]() определяется по ВКФ, которая рассчитывается по выражению вида
определяется по ВКФ, которая рассчитывается по выражению вида
![]() , р=0
, р=0 ![]() N , (4)
N , (4)
где ![]() - соответственно, сигналы, зарегистрированные базовым датчиком 2 и датчиком 1; N – длина выборки
- соответственно, сигналы, зарегистрированные базовым датчиком 2 и датчиком 1; N – длина выборки ![]() ; Т – время регистрации сигналов,
; Т – время регистрации сигналов, ![]() - интервал дискретизации или цифрового преобразования сигналов.
- интервал дискретизации или цифрового преобразования сигналов.
Определение расстояния, согласно (2) и (3), осуществляется в линейной постановке при условии того, что источник акустического излучения находится на линии соединяющей приемные датчики (рис.1, а). Однако источник излучения (![]() , рис.1, б) может находиться на некоторой глубине Х2 по толщине продуктопровода, по отношению к линии, соединяющей приемные датчики. В этом случае, за место положения источника излучения в линейной постановке задачи принимают точку проекции источника
, рис.1, б) может находиться на некоторой глубине Х2 по толщине продуктопровода, по отношению к линии, соединяющей приемные датчики. В этом случае, за место положения источника излучения в линейной постановке задачи принимают точку проекции источника ![]() на линию, соединяющую приемные датчики, т.е. точку И (рис.1, б). Однако расчеты координат, согласно (3) показывают существование методической ошибки. Данная ошибка не зависит от способа определения временной задержки – по пиковой амплитуде ВКФ, по временному положению центра тяжести площади пикового сигнала ВКФ или центра тяжести его энергии. Она определяется выражением вида
на линию, соединяющую приемные датчики, т.е. точку И (рис.1, б). Однако расчеты координат, согласно (3) показывают существование методической ошибки. Данная ошибка не зависит от способа определения временной задержки – по пиковой амплитуде ВКФ, по временному положению центра тяжести площади пикового сигнала ВКФ или центра тяжести его энергии. Она определяется выражением вида
![]() , (5)
, (5)
где Х2- глубина расположения источника акустического излучения относительно линии, соединяющей приемные датчики.
Из (5) следует, что ошибка ![]() будет равна нулю при следующих условиях
будет равна нулю при следующих условиях
|
|
и любом значении . |
При этом, если возрастают значения ![]() и
и ![]() , то ошибка определения положения источника излучения возрастает. Для уменьшения значения ошибки необходимо вводить поправку. Другими словами, действительная координата источника излучения определяется как приблизительное значение координаты до источника относительно начала координат “0”, с учетом поправки на координату, т.е.
, то ошибка определения положения источника излучения возрастает. Для уменьшения значения ошибки необходимо вводить поправку. Другими словами, действительная координата источника излучения определяется как приблизительное значение координаты до источника относительно начала координат “0”, с учетом поправки на координату, т.е.
![]() , (6)
, (6)
где ![]() ,
, ![]() - соответственно, приблизительное значение координаты и поправка на координату, которая обусловлена методической ошибкой.
- соответственно, приблизительное значение координаты и поправка на координату, которая обусловлена методической ошибкой.
Для фиксированной схемы размещения датчиков значение ![]() может быть рассчитано для каждого значения
может быть рассчитано для каждого значения ![]() и описано необходимой функцией. Другими словами, можно учитывать максимальную ошибку, которая определяется габаритами продуктопровода и расстоянием между датчиками. Для этого необходимо использовать выражение (5) при известном максимальном значении координаты
и описано необходимой функцией. Другими словами, можно учитывать максимальную ошибку, которая определяется габаритами продуктопровода и расстоянием между датчиками. Для этого необходимо использовать выражение (5) при известном максимальном значении координаты ![]() , которая соответствует размеру продуктопровода по толщине.
, которая соответствует размеру продуктопровода по толщине.
На рис. 2 показаны результаты расчетов абсолютного значения ошибки определения координат при базовом расстоянии между датчиками, равном L/2=25 м, и толщине продуктопровода, равной h =1 м. Из рис.2 видно, что при уменьшении координаты ![]() абсолютное значение ошибки, в зависимости от глубины размещения источника излучения, уменьшается. Следует отметить, что потенциально источник излучения не может быть расположен на линии базового размера по вертикали, т.е. на линии расположения датчиков по вертикали, так как, в этом случае, расстояние расположения источника излучения до начала координат будет превышать базовый размер. Это означает, что кривая 1 на рис. 2 не будет существовать. Расчеты показывают, что при базе в десятки метров и значении (
абсолютное значение ошибки, в зависимости от глубины размещения источника излучения, уменьшается. Следует отметить, что потенциально источник излучения не может быть расположен на линии базового размера по вертикали, т.е. на линии расположения датчиков по вертикали, так как, в этом случае, расстояние расположения источника излучения до начала координат будет превышать базовый размер. Это означает, что кривая 1 на рис. 2 не будет существовать. Расчеты показывают, что при базе в десятки метров и значении (![]() )<0,25 ошибка определения координаты по абсолютному значению не превышает единиц сантиметров. При возрастании отношения (
)<0,25 ошибка определения координаты по абсолютному значению не превышает единиц сантиметров. При возрастании отношения (![]() )>0,25 ошибка определения координаты возрастает. Для уменьшения ошибки необходимо проводить построение номограмм абсолютного значения ошибки по толщине продуктопровода (рис. 2) при определенном расстоянии до источника излучения сигналов АЭ.
)>0,25 ошибка определения координаты возрастает. Для уменьшения ошибки необходимо проводить построение номограмм абсолютного значения ошибки по толщине продуктопровода (рис. 2) при определенном расстоянии до источника излучения сигналов АЭ.
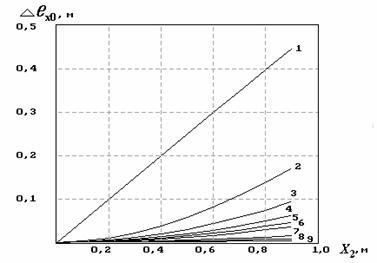
Рис. 2 Зависимости изменения абсолютного значения ошибки определения координаты ![]() при размещении источника излучения по толщине продуктопровода. Базовый размер L/2= 25 м, толщина продуктопровода h= 1 м. Расстояние до источника излучения
при размещении источника излучения по толщине продуктопровода. Базовый размер L/2= 25 м, толщина продуктопровода h= 1 м. Расстояние до источника излучения ![]() ; 1 – 25 м; 2- 24 м, 3 – 23 м; 4 – 22 м; 5 – 21 м; 6 – 20 м; 7- 15 м; 8 – 10 м; 9 – 5 м
; 1 – 25 м; 2- 24 м, 3 – 23 м; 4 – 22 м; 5 – 21 м; 6 – 20 м; 7- 15 м; 8 – 10 м; 9 – 5 м
Рассмотренная ошибка является систематической и обусловлена геометрией продуктопровода и самим методом определения места положения источника акустического излучения. Вместе с тем, отклонение места положения источника от прямой линии, соединяющей приемные датчики, приводит и к изменению направления приема. С учетом дисперсии скорости звука, неравномерности физико-механических характеристик материала продуктопровода, наличия разнообразных дефектов это может приводить к возникновению фазовых сдвигов, видоизменению и трансформации ВКФ. Как показывают эксперимен-тальные исследования при перемещении источника акустического излучения по толщине продуктопровода наблюдается неустойчивость ВКФ, которая заключается в следующем. Фиксируется изменение периода ВКФ (наличие временного сдвига), а так же появление пикового сигнала с максимальной амплитудой в области отрицательных значений ВКФ.
На рис. 3 показаны схемы расположения источника акустического излучения и типичные результаты обработки ВКФ. На рис. 3, а, б показаны, соответственно, схема размещения датчиков на продуктопроводе и источника акустического излучения, который расположен на линии соединяющей приемные датчики, а так же ВКФ, полученная по результатам обработки регистрируемых сигналов, согласно (4). На рис. 3, в, г показаны, соответственно, схема размещения датчиков на продуктопроводе и источника акустического излучения, который расположен на противоположной стороне продуктопровода, по отношению к линии соединяющей приемные датчики, а так же ВКФ, полученная по результатам обработки регистрируемых сигналов, согласно (4). ВКФ на рис.3, б, г нормированы, т.е. приведены к максимальному значению амплитуды пикового сигнала (![]() ).
).
Проведенные исследования заключались в следующем. Осуществлялось определение места положения свища в продуктопроводе. Свищ представлял собой сквозной дефект в виде трещины неправильной формы с максимальным размером ~ 2 мм, который образовался в трубе. Труба была изготовлена из стали 0Х18Н10Т. Ее диаметр составлял 500 мм, толщина стенки – 10 мм. Скорость звука в материале трубы составляет 5120 м/с. Труба была заполнена воздухом под давлением.
|
а
б |
в
г |
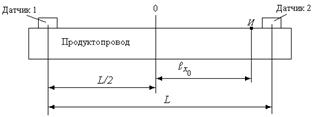
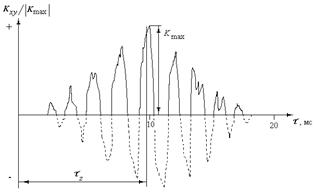
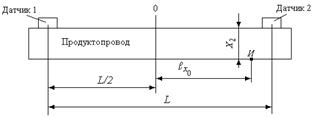
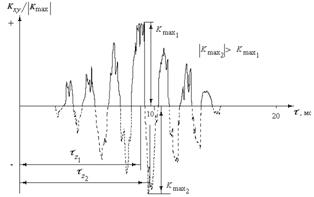
Рис. 3 Схемы расположения источника акустического излучения (а, в) и нормированные ВКФ (б, г), полученные по результатам обработки сигналов АЭ, в соответствии с (4): И – источник акустического излучения
На трубе были установлены два датчика, согласно рис.3, между которыми находился сквозной дефект. Датчики размещались следующим образом. Сначала так, что сквозной дефект находился на линии, соединяющей датчики (рис. 3, а), а затем с противоположной стороны линии, соединяющей датчики (рис. 3, в). Расстояние L между датчиками составляло 50 м. Расстояние ![]() от начала координат “0” до сквозного дефекта составляло 24 м (рис. 3, а, в). Во втором случае, датчик размещался на расстоянии Х2, равном 500 мм по толщине трубы от линии, которая соединяет датчики. При истечении воздуха из трубы проводилась регистрация и обработка сигналов АЭ с определением задержки прибытия сигналов на датчики по временному положению энергетического центра тяжести пикового сигнала ВКФ.
от начала координат “0” до сквозного дефекта составляло 24 м (рис. 3, а, в). Во втором случае, датчик размещался на расстоянии Х2, равном 500 мм по толщине трубы от линии, которая соединяет датчики. При истечении воздуха из трубы проводилась регистрация и обработка сигналов АЭ с определением задержки прибытия сигналов на датчики по временному положению энергетического центра тяжести пикового сигнала ВКФ.
Результаты проведенных исследований показали, что при расположении источника излучения на линии, соединяющей приемные датчики, ВКФ имеет сложный, изрезанный характер изменения (рис.3, б). Однако, как показала статистическая обработка данных результатов 100 измерений, пиковый сигнал, в большинстве случаев, находится в области положительных значений ВКФ (рис. 3, б). При этом определено, что место положение свища относительно начала координат “0” в принятой схеме расположения датчиков (рис. 3, а) составляет ![]() = 23,79
= 23,79![]() 0,053 м. Из полученного результата видно, что максимальная ошибка определения места положения сквозного дефекта составляет порядка 1,1 %.
0,053 м. Из полученного результата видно, что максимальная ошибка определения места положения сквозного дефекта составляет порядка 1,1 %.
При расположении источника излучения на противоположной стороне трубы, в соответствии со схемой, показанной на рис.3, в, ВКФ имеет более сложный характер изменения (рис. 3, г). При этом, как показала статистическая обработка данных результатов 100 измерений, в большинстве случаев, на ВКФ наблюдается сдвиг в область меньших времен, а пиковый сигнал находится в области отрицательных значений ВКФ (рис. 3, б). Фактически наблюдается временной сдвиг и перераспределение пикового сигнала из положительной в отрицательную область значений ВКФ. Речь идет об абсолютном значении амплитуды пикового сигнала ВКФ. Из полученных результатов (рис. 3, б, г) видно, что в первом случае - ![]() (рис.3, б), а во втором случае -
(рис.3, б), а во втором случае - ![]() .
.
Обработка временного положения энергетического центра тяжести положительного пикового сигнала ВКФ, при расположении источника излучения на противоположной стороне трубы, показала, что в принятой схеме расположения датчиков абсолютная ошибка определения места положения источника излучения может исчисляться единицами метров, т.е. превышать 20%. Это обусловлено тем, что при учете только положительного пикового сигнала ВКФ возникает дополнительная ошибка ![]() , за счет разности временных положений энергетических центров тяжести положительного и отрицательного пиковых сигналов, т.е.
, за счет разности временных положений энергетических центров тяжести положительного и отрицательного пиковых сигналов, т.е. ![]() = |
= |![]() -
- ![]() | (рис. 3, г). В этом случае расчетная координата положения источника излучения будет иметь значение
| (рис. 3, г). В этом случае расчетная координата положения источника излучения будет иметь значение ![]()
![]()
![]() . В тоже время, статистическая обработка данных по временному положению энергетического центра тяжести пикового сигнала, с учетом положительной и отрицательной составляющей ВКФ, показала, что место положение свища относительно начала координат “0”, в принятой схеме расположения датчиков (рис. 3, в), составляет
. В тоже время, статистическая обработка данных по временному положению энергетического центра тяжести пикового сигнала, с учетом положительной и отрицательной составляющей ВКФ, показала, что место положение свища относительно начала координат “0”, в принятой схеме расположения датчиков (рис. 3, в), составляет ![]() = 23,72 ± 0,047 м. Систематическая ошибка определения его места положения, согласно (5), составляет
= 23,72 ± 0,047 м. Систематическая ошибка определения его места положения, согласно (5), составляет ![]() 0,06 м. С учетом этого
0,06 м. С учетом этого ![]() =23,72
=23,72![]() 0,041 м. Из полученного результата видно, что максимальная ошибка определения места положения сквозного дефекта составляет порядка 1,34 %. Ошибка выше, чем в первом случае, т.е. при расположении источника излучения на линии, соединяющей приемные датчики. Однако она на порядок ниже, чем в случае обработки только положительного пикового сигнала ВКФ.
0,041 м. Из полученного результата видно, что максимальная ошибка определения места положения сквозного дефекта составляет порядка 1,34 %. Ошибка выше, чем в первом случае, т.е. при расположении источника излучения на линии, соединяющей приемные датчики. Однако она на порядок ниже, чем в случае обработки только положительного пикового сигнала ВКФ.
Заключение
Таким образом, результаты проведенных исследований показали, что при регистрации и обработки сигналов акустической эмиссии для определения места положения источника излучения необходим учет систематической погрешности. Она обусловлена линейной постановкой задачи при определении места положения источника акустического излучения для продуктопровода с заданной геометрией. Систематическая ошибка возникает в случае, если источник излучения находится не на линии, соединяющей приемные датчики, а располагается на некоторой глубине по толщине продуктопровода. Данная ошибка может быть учтена для продуктопровода определенной геометрии и схемы расположения приемных датчиков, размещаемых на продуктопроводе. Для этого необходимо построение расчетных номограмм изменения систематической ошибки при известной толщине продуктопровода и определенном расстоянии до источника излучения. В тоже время, расположение источника акустического излучения по толщине изделия, с учетом дисперсии звука, неравномерности физико-механических характеристик материалов продуктопроводов, их дефектности и других факторов, приводит к видоизменению и трансформации ВКФ. При этом может происходить перераспределение пикового сигнала ВКФ из положительной в отрицательную область значений. Как показали полученные результаты, для уменьшения ошибки определения места положения источника акустического излучения, пиковый сигнал необходимо определять с учетом положительных и отрицательных значений амплитуд ВКФ.
The results of researches to determination a position of through defects in constructions, that working under pressure, using of acoustic emission are adduced. Is shown that arrangement a source of acoustic radiation on construction depth results in originating a bias. For its count the plotting of nomograms a change of bias is necessary at known construction depth and definite spacing interval up to a radiation source. The results of processing a mutual correlation function are reviewed at arrangement of acoustic radiation source on a line, which one connects sensors, and as on the counter party construction. Is shown, that for decreasing an error of a fix position of radiation source, the peak signal is necessary for determining with allowance of positive and negative amplitudes of a mutual correlation function.
1. Бабак В.П., Пономаренко П.В. Локализация места положения сквозных дефектов по сигналам акустической эмиссии//Автоматика, автоматизация, электротехнические комплексы и системы.-2007.-№ 1.-С.39-46.
2. Каллакот Р. Диагностика повреждений.-М.: Мир,1989.-512 с.
3. Владимирський А.А., Владимирський И.А. Методика комплексного использования течеискателей К-10 и А-10 при порске утечек трубопроводов теплових сетей// Зб. наук. праць. ІПМЕ НАНУ.-2000.-Вип. 9.-С. 3-11.
4. Безпрозванный А.А., Владимирский А.А., Владимирский И.А., Ненюк А.Т. Повышение достоверности поиска утечек трубопроводов тепловых сетей// Энергетика и электрофикация.-2000.-№2 (199).-С.29-32.
5. Владимирский А.А., Владимирский И.А. Оценка некоторых погрешностей корреляционного течеискателя// Зб.накових праць ІПМЕ НАНУ.- 1999.-Вип.2.-С.118-126.
6. Владимирский А.А., Владимирский И.А. К формированию модели диагностируемого участка трубопроводной системы для решения задач течеискания // Зб.накових праць ІПМЕ НАНУ.- 2001.-Вип.7.-С.66-69.
7. Лапшин Б.М., Овчинников А.Л. Взаимоспектральный метод обнаружения утечек на трубопроводах с односторонним доступом //Дефектоскопия.- 2004.- № 9.- С. 19-26.
8. Владимирський А.А., Владимирський И.А. Способ частотного анализа характеристик корреляционных функций вибросигналов // Зб. наук. праць. ІПМЕ НАНУ.- 2000.- С. 23-24.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Информационно-измерительные системы
Ковальов О.І. Вимірювання у процесно-орієнтованих стандартахПолякова М.В., Ищенко А.В., Худайбердин Э.И. Порогово-пространственная сегментация цветных текстурированных изображений на основе метода JSEG
Дзюбаненко А. В. Организация компьютерных систем для анализа изображений
Гордеев Б.Н., Зивенко А.В., Наконечный А.Г. Формирование зондирующих импульсов для полиметрических измерительных систем
Богданов А.В., Бень А.П., Хойна С.И. Релаксация обратного тока диодов Шоттки после их магнитно-импульсной обработки (МИО)
Тверезовский В.С., Бараненко Р.В. Проектирование измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Оптимизированная модель измерителя доб-ротности варикапов
Руднєва М.С., Кочеткова О.В., Задорожній Р.О. Принципи побудови оптимальної структури інформаційно-вимірювальної системи геометричних розмірів об’єктів в діапазоні від 1 нм до 1000 нм
Биленко М.С., Рожков С.А., Единович М.Б. Идентификация деформаций пе-риодических структур с использованием систем технического зрения
Рашкевич Ю.М., Ковальчук А.М., Пелешко Д.Д. Афінні перетворення в модифікаціях алгоритму RSA шифрування зображень
Дидык А.А., Фефелов А.А, Литвиненко В.И., Шкурдода С.В., Синяков Ф. В. Классификация масс-спектров с помощью кооперативного иммунного алгоритма
Клименко А.K. Обратная модель для решения задач в системах с многосвязными динамическими объектами
Завгородній А.Б. Порівняльне дослідження твердотільних і рідиннофазних об'єктів методом газорозрядної візуалізації
Голощапов С.С., Петровский А.В., Рожко Ж.А., Боярчук А.И. Измерение доб-ротности колебательного контура на основе метода биения частот
Кириллов О.Л., Якимчук Г.С. Диагностирование критерия безопасности при заполнении замкнутых объемов СПЖ косвенным методом
Долина В.Г. Проблеми підвищення точності рефрактометра на основі прозорих порожнистих циліндрів.
Самков О.В., Захарченко Ю.А. Застосування алгоритму клонального відбору для побудови планів модернізації авіаційної техніки
Попов Д.В. Метод формування регламентів технічного обслуговування повітряних суден
Казак В.М., Чорний Г.П., Чорний Т.Г. Оцінювання готовності технічних об’єктів з урахуванням достовірності їх контролю
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования цифрового измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования устройства для разбраковки варикапов по емкостным параметрaм и добротности
Сосюк А.В. Інтелектуальний автоматизований контроль знань в системах дистанційного навчання
Соколов А.Є. Деякі аспекти систезу комп’ютеризованої адаптивної системи навчання
Полякова М.В., Волкова Н.П., Іванова О.В. Сегментація зображень стохастичних текстур амплітудно-детекторним методом у просторі вейвлет-перетворення
Литвиненко В.И., Дидык А.А., Захарченко Ю.А. Компьютерная система для решения задач классификации на основе модифицированных иммунных алгоритмов
Лубяный В.З., Голощапов С.С. Прямоотсчетные измерители расхождений емкостей
Беляев А.В. Построение навигации для иерархических структур в WEB-системах и системах управления WEB-сайтом
Терновая Т.И., Сумская О.П., Слободянюк И.И., Булка Т.И. Контроль качества тканей специального назначения с помощью автоматических систем.
Шеховцов А.В. Інформаційний аспект: розпізнавання образів індивідуума.
Полякова М.В. Определение границ сегмента упорядоченной текстуры на изображении с однородным фоном с помощью многоканального обнаружения пачки импульсов.
Литвиненко В.И. Прогнозирования нестационарных временных рядов с помощью синтезируемых нечетких нейронных сетей
Ковриго Ю.М., Мисак В.Ф., Мовчан А.П., Любицький С.В. Автоматизована система діагностики генераторів електростанцій
Браїловський В.В., Іванчук М.М., Ватаманюк П.П., Танасюк В.С. Керований детектор імпульсного ЯКР спектрометра
Забытовская О.И. Построение функции полезности по экспериментальным данным.
Шиманські З. Апаратні засоби сегментації мовного сигналу
Хобин В.А., Титлова О.А. К вопросу измерения парожидкостного фронта в дефлегматоре абсорбционно-диффузионной холодильной машины (АДХМ)
Фефелов А. А. Использование байесовских сетей для решения задачи поиска места и типа отказа сложной технической системы
Слань Ю. М., Трегуб В. Г. Оперативна нейромережна ідентифікація складних об’єктів керування
Ролик А.И. Модель управления перераспределением ресурсов информационно-телекоммуникационной системы при изменении значимости бизнес-процессов
Кириллов О.Л., Якимчук Г.С., Якимчук С.Г. Изучение электрического поля с помощью датчика измерителя электростатического потенциала на модели замкнутого металлического объема
Грицик В.В. Застосування штучних нейронних мереж при проектуванні комп’ютерного зору.
Гасанов А.С. Информационные технологии построения систем прогнозирования отказов
Шеховцов А.В., Везумский А.К., Середа Е.С. Алгоритм сжатия информации без потерь: модифицированный алгоритм LZ77
Ходаков В.Е., Жарикова М.В., Ляшенко Е.Н. Методы и алгоритмы визуализации пространственных данных на примере моделирования распространения лесных пожаров.
Полякова М.В., Крылов В.Н. Обобщённые масштабные функции с компактным носителем в задаче сегментации изображений упорядоченных текстур. – C. 75 – 84.
Полторак В.П., Дорогой Я.Ю. Система распознавания образов на базе нечеткого нейронного классификатора.
Литвиненко В.И. Синтез радиально-базисных сетей для решения задачи дистанционного определения концентрации хлорофилла.
Бражник Д.А. Управление совмещением изображения объекта в сцене и эталонного изображения.
Бабак В.П., Пономаренко А.В. Локализация места положения сквозных дефектов по сигналам акустической эмиссии.
Мороз В. В. R-D проблема и эффективность систем сжатия изображений.
Крылов В.Н., Полякова М.В., Волкова Н.П. Контурная сегментация в пространстве гиперболического вейвлет-преобразования с использованием математической морфологии.
Квасников В.П., Баранов А.Г. Анализ влияния дестабилизирующих факторов на работу биканальной координатно-измерительной машины.
Казак В.М., Гальченко С.М., Завгородній С.О. Аналіз можливості застосування імовірнісних методів розпізнавання для виявлення пошкоджень зовнішнього обводу літака.
Тищенко И.А., Лубяный В.З. Управление коммутационными процессами в интегрированных сетях связи.
Корниенко-Мифтахова И.К.,Филоненко С.Ф. Информационно-измерительная система для анализа характеристик динамического поведения конструкций.
Тверезовский В.С., Бараненко Р.В. Модель измерителя емкости с линейной шкалой измерений.
Полякова М.В., Крылов В.Н. Мультифрактальный метод автоматизированного распознавания помех на изображении.
Рожков С.О., Федотова О.М. Алгоритм розпізнавання дефектів тканин для автоматичної системи контролю якості.
Бражник Д.А. Использование проективного преобразования для автоматизации обнаружения объектов.
Ходаков В.Є., Шеховцов А.В., Бараненко Р.В. Математичні аспекти створення автоматизованої системи „Реєстр виборців України”