УДК. 621.586
АНАЛИЗ МЕТОДОВ РАЗРАБОТКИ НЕЧЕТКИХ САР ДЛЯ УПРАВЛЕНИЯ СЛОЖНЫМИ ВЗАИМОСВЯЗАННЫМИ ОБЪЕКТАМИ
Михайленко В.С., Ложечников В.Ф.
Сложные технологические процессы связаны с влиянием на них целого ряда неопределенных факторов (внешних и параметрических возмущений). К примеру, в теплоэнергетике на ТЭС, ТЭЦ, районных и городских котельных, системах теплоснабжения и кондиционировании воздуха в промышленных зданиях и помещениях и т.п. Существующие в настоящее время традиционные системы управления обеспечивают, как правило, только стабилизацию установившихся режимов. Вопрос решения задач оптимального управления динамическими режимами сложных объектов с минимумом расхода топлива при ограничениях на условия функционирования остается открытым. Типовые САР не учитывают информацию о распределении температур и реальном расходе тепловой энергии в отапливаемых помещениях, изменению ограждающих конструкций и теплоизоляции зданий и т.д.[1]. Наряду с этим, в последнее время, широкий научный интерес вызывают нечеткие САР успешно функционирующие в условиях неопределенности. Анализ работы нечетких САР и разработка методов и алгоритмов для повышения показателей качества переходных процессов регулирования является актуальным [2].
Одним из научных направлений, в данной области, является нечеткая коррекция настроек ПИ – регулятора по анализу показателей качества переходных процессов или использование нечетких ПИ – регуляторов [3]. К примеру, настройка традиционных ПИ – регуляторов в двухсвязных системах автоматического регулирования весьма трудоемкая задача, требующая детальной корректировки настроек: Кр – коэффициента передачи и Ти – времени интегрирования при проведении пуско-наладочных работ. При этом подход к корректировке уставок относительно расчетных значений может быть качественным или нечетким т.е. в виде лингвистических правил составленных опытными наладчиками – экспертами [3]:
– если переходный процесс характеризуется слабой колебательностью (или отсутствием таковой), но большой длительностью, то Кр регулятора следует увеличивать, а Ти уменьшать;
– если переходный процесс носит сильно выраженный колебательный характер, то Кр должен быть уменьшен;
– если переходный процесс имеет слабую колебательность и малое время регулирования, то он близок к наилучшему.
Следует отметить, что в производственных условиях, при частых изменениях нагрузок и возмущений, значения параметров передаточных функций объекта подвержены динамизму, что требует от наладчика введения новых правил в базу знаний нечеткого ПИ - регулятора. Однако, в силу ограниченности времени, нехватки технических средств регистрации, отсутствия знаний и опыта, наладчики зачастую не могут предусмотреть все условия поведения переходного процесса, что может привести к снижению эффективности работы нечеткой САР. Другим слабым звеном нечетких ПИ – регуляторов, по нашему мнению, является этап фаззификация Кр и Ти т.к., к примеру, «средний Кр» и «низкий Ти» не всегда могут соответствовать оптимальным значениям настроек ПИ – регулятора, что опять же может привести к устойчивому, но и одновременно длительному переходному процессу.
Исходя из вышесказанного, авторами предлагается модель двухканального нечеткого регулятора работающего на основе алгоритма Мамдани [4]. Целью статьи является разработка нечеткого алгоритма регулирования технологическими процессами соотношения и компьютерная апробация полученной модели в неопределенных условиях (при изменении значений функций принадлежности объекта).
На первом этапе предлагается структурная схема нечеткой САР (рис.1).
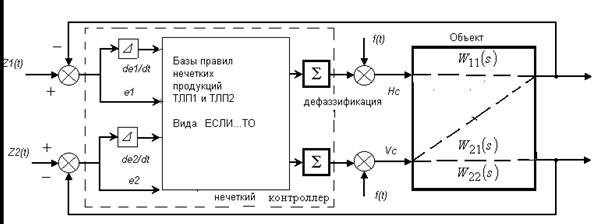
Рис. 1 Структурная схема двухканального нечеткого контроллера
На втором этапе, производится определение числа входов и выходов, а также их фаззификация. Исходя из общеизвестной структуры нечеткого регулятора [2] на вход регулятора подаются четыре лингвистические переменные: (e1, e2 – сигналы рассогласования двух каналов; de1/dt, de2/dt - производные сигналов рассогласования), а выходом являются (Uс, Sc – управляющие воздействия).
При проведении фаззификации определяются нечеткие множества для отклонения е1(t) и скорости ее изменения е1´(t), управляющего воздействия Uс(t), а также для ошибки e2(t), и скорости ее изменения e2´(t) и управляющего воздействия Sc(t) по второму каналу регулирования вид, назване и количество функций принадлежности определены с помощью рекомендаций [2] и доработаны авторами:
 (1)
(1)
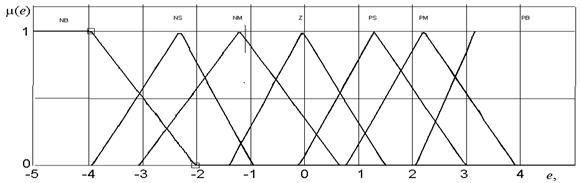
где E – универсальное множество отклонений; e(t) – текущее значение отклонения в определенный момент времени; µi(ei(t)) – функция принадлежности к нечеткому множеству ei(t); NB – негативно большое , NS – негативно среднее, NM – негативно малое, Z – нулевое, PS – положительно среднее, PM – положительно малое, PB – положительно большое.
Аналогичным образом определяются нечеткие множества для второго отклонения, скоростей изменения отклонения двух каналов и управляющих воздействий.
Производная:
dE1/dt ![]() (e’m,
(e’m, ![]() (e’m (t))), q = 1, 2,…, n7, n7=7; (2)
(e’m (t))), q = 1, 2,…, n7, n7=7; (2)
Управляющего воздействия (выход) регулятора:
Uc ![]() (uem,
(uem, ![]() (um (t))), c = 1, 2,…, n7, n7 = 7, (3)
(um (t))), c = 1, 2,…, n7, n7 = 7, (3)
где
e1(t) = z1(t) – y1(t), e1’ (t) = ![]() e (t). (4)
e (t). (4)
Графики функции принадлежности представлены на рис.2 – 4.
На следующем этапе разработки нечеткой модели регулирования производится составления базы правил.
Правила двухканального нечеткого регулятора составлены в виде следующих высказываний (табл.1):
ЕСЛИ e1(t) =NS , И e1´(t) =NM И e2(t)= Z , И e2´(t) =Z, ТО Uc(t) =NS, ИНАЧЕ;
ЕСЛИ e1(t) =PB, И e1´(t)= Z, И e2(t) =Z , И e2´(t) =Z, ТО Uc(t) =PS ИНАЧЕ;
ЕСЛИ e2(t) =NS , И e2´(![]() t) =NM И e1(t) =Z , И e1´(t)= Z, ТО Sc(t) =NS, ИНАЧЕ;
t) =NM И e1(t) =Z , И e1´(t)= Z, ТО Sc(t) =NS, ИНАЧЕ;
ЕСЛИ e2(t) =PB, И e2´(t) =Z, И e1(t) =Z , И e1´(t)= Z, ТО Sc(t) =PS ИНАЧЕ и т.п.
 O2
O2
Рис. 2 Функции принадлежности «ошибка»
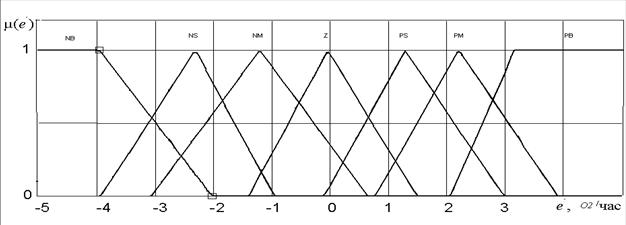
Рис. 3 Функции принадлежности «производная ошибки»
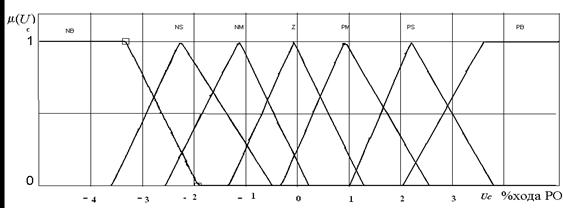
Рис. 4 Функции принадлежности «управляющее воздействие»
Этап дефаззификации, по первому каналу регулирования, проводится методом центра тяжести:
Uc =  (5)
(5)
Данный метод используется для дефаззификации управляющего воздействия второго канала
Sc =  (6)
(6)
При апробации нечеткой модели и анализа ее эффективности используется пакет (Simulink) (рис.5). Объект регулирования состоит из инерционного звена второго порядка с взаимосвязанными регулируемыми параметрами. Передаточные функции по каналам регулирования и каналу взаимных связей в соответствии с распространенными динамическими характеристиками [5], имеют вид:
![]()
![]()
![]() (7)
(7)
Таблица 1
База правил нечеткого регулятора
|
Отклонение e1(t) e2(t) |
Производная от отклонения, e1´(t); e2´(t) |
||||||
|
NB |
NS |
NM |
Z
|
PM |
PS |
PB |
|
|
Uc(t);Sc(t) |
|||||||
|
NB |
NB |
NB |
NB |
OS |
Z |
PM |
PS |
|
NS |
NS |
NS |
NS |
NM |
PM |
PM |
PS |
|
NM |
NS |
NM |
NM |
Z |
Z |
PM |
PS |
|
Z |
NS |
NM |
NM |
Z |
PM |
PM |
PS |
|
PM |
NM |
NM |
Z |
Z |
PM |
PM |
PS |
|
PS |
NM |
NM |
Z |
PM |
PS |
PS |
PS |
|
PB |
NS |
NM |
Z |
PS |
PS |
PB |
PB |
Исследование проводилось по каналу задания Z1(t)=Z2(t) = 1, при влиянии канала возмущения, во временной области 50 сек. Имитационная структура нечеткой САР, в среде Simulink, показана на рис.5.
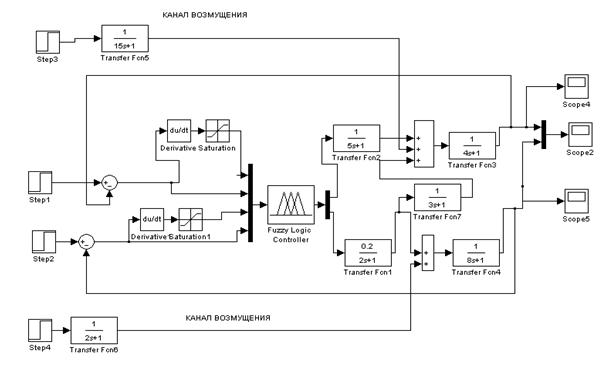
Рис. 5 Имитационная модель нечеткой двухканальной САР
Графики переходных процессов регулирования, полученные на осциллографе (Scoop2), показаны на рис.6. Процессы носят апериодический характер с временем регулирования Тр = 35 сек, что демонстрирует успешную работу нечеткого алгоритма. Для проверки работы нечеткой САР в неопределенных условиях проводится изменение значений передаточных функций объекта (постоянных времени) по каналам задания и возмущения, т.е. влияние параметрических возмущений (рис.7). Новые переходные процессы показаны на рис.8.
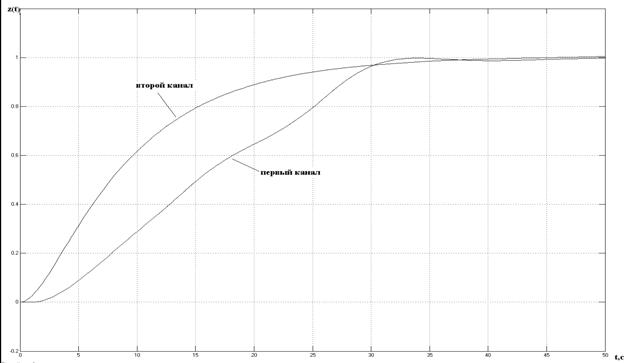
Рис. 6 Переходные процессы регулирования
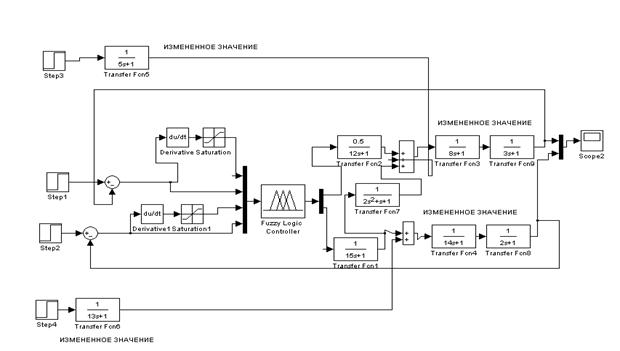
Рис.7 Имитационная модель нечеткой САР с измененными значениями передаточных функций
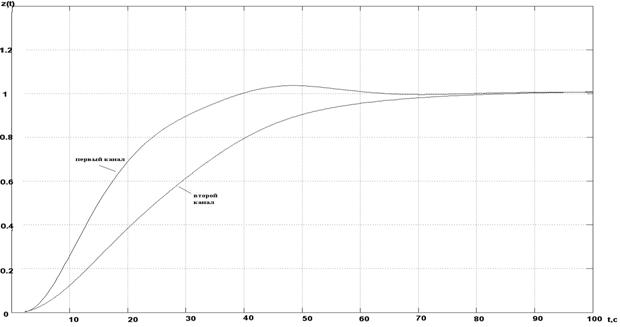
Рис. 8 Переходные процессы после изменения значений передаточных функций
Анализ вида переходных процессов (рис.8) свидетельствует об увеличении времени регулирования до 80 сек, что является лучшим результатом по сравнению с нечеткими ПИ – регуляторами. Можно заключить, что предложенная нечеткая двухканальная система автоматического регулирования успешно функционирует при усложнении структуры объекта регулирования и может быть применима для управления большим классом сложных промышленных объектов.
The article deals with application of complex system automatic control and fuzzy system control for difficult object. The effect of investigation is elaboration of two channel fuzzy regulator which has effective regulation in the structure variable conditions.
- Ротач В.Я., Клюев А.С. Автоматизация настройки систем управления. М.: Энергоиздат, 1984 – 272 с.
- Алиев Р.А., Церковный А.Э., Мамедова Г.А. Управление производством при нечеткой исходной информации. М.: Энергоиздат. 1991. – 234 с.
- Ковриго Ю.М., Мовчан А.П. и др. Адаптивное управление теплоэнергетическими процессами.// Автоматика. Автоматизация. Электротехнические комплексы и системы. – ХНТУ. – 2007 - № 2(20) – с. 147 – 156.
- Леоненков А. Ю. Нечеткое моделирование в среде Matlab и fuzzyTech. - С. - Птб.: БХВ, 2003. ─ 720 с.
- Ротач В.Я. Расчет динамики промышленных автоматических систем регулирования.— М.: Энергия, 1973.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Бобриков С.А., Пичугин Е.Д. Коррекция нелинейной характеристики типа «реле с зоной нечувствительности».
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.