УДК 66.096.5; 681.5.015; 62.503.57
ОПТИМІЗАЦІЯ ПАРАМЕТРІВ ПРОЦЕСУ ЗНЕВОДНЕННЯ І ГРАНУЛОУТВОРЕННЯ В АПАРАТІ ПСЕВДОЗРІДЖЕНОГО ШАРУ
Корнієнко Б.Я., Снігур О.В.
Вступ
Розглядається проведення процесу з отриманням продукту постійного гранулометричного складу без зовнішнього рециклу. Представлені результати статичної оптимізації процесу зневоднення і гранулювання водних розчинів сульфата амонію.
Експериментальні дослідження проведені на лабораторній установці, корпус гранулятора у формі паралелепіпеда 0,11х0,29х1,3 м. Для введення рідкої фази всередині псевдозрідженого шару розташований диспергатор. Завдяки застосуванню газорозподільної решітки у псевдозрідженому шарі створюються циркуляційні потоки.
При аналізі процесу зневоднення і гранулювання у псевдозрідженому шарі з точки зору оптимізації суттєвий вплив на ведення процесу мають енергетичні показники.
Якість гранул визначають багатьма властивостями і вимогами до них. З математичного погляду гранули являють собою систему, що характеризується сукупністю вихідних показників критеріальних властивостей, оптимізація яких доцільна з використанням узагальненого показника якості.
Постановка задачі
Метою даної статті є пошук зони оптимальних значень змінних технологічного процесу, що впливають на коефіцієнт грануло утворення для процесу псевдозрідження і гранулоутворення в апараті псевдозрідженого шару, побудова математичної моделі процесу, що враховує всі фактори, які впливають на якісний і кількісний показник процесу псевдо зрідження та перевірка адекватності математичної моделі.
В якості критерію оптимальності також можна вибрати максимальний вихід продукту при заданому гранулометричному складі, тобто зменшити пилеунос з апарату. Але на отримання постійного заданого гранулометричного складу суттєво впливає кінетика гранулоутворення у псевдозрідженому шарі. Тому в якості критерію оптимальності обрали максимальний коефіцієнт гранулоутворення.
Коефіцієнт гранулоутворення ψ є основною характеристикою грануляторів у псевдозрідженому шарі і визначається
![]() (1)
(1)
де ![]() – продуктивність гранулятора по гранульованому продукту,
– продуктивність гранулятора по гранульованому продукту, ![]() ;
;
![]() – витрати розчину, що подається на диспергацію,
– витрати розчину, що подається на диспергацію, ![]() .
.
Тобто коефіцієнт гранулоутворення показує, яка частина твердої фази з розчину гранулюється, а інша у вигляді пилу виноситься з апарату.
Низький ψ (менше 90%) може характеризувати процес грануляції, як не економічний із-за втрат енергії і ресурсу устаткування на вловлювання і повторну грануляцію пилу.
На коефіцієнт гранулоутворення впливають режимні параметри процесу (температура в шарі, маса шару і початкова швидкість крапель розчину в диспергаторі та інші фактори).
Аналіз процесу і окремі досліди показали, що збільшення швидкості диспергації, маси псевдозрідженого шару повинні сприяти росту ψ, а збільшення температури шару, його зменшенню. Науковий інтерес являє взаємовплив при одночасній зміні параметрів, для знаходження оптимальних режимів. Для цього був складений план експерименту на основі раніше проведених досліджень, де були виявлені інтервали змін параметрів, в яких вірогідність агломерації гранул не висока. Це: температура шару ![]() , швидкість диспергації
, швидкість диспергації ![]() і маса шару
і маса шару ![]() , яка однозначно характеризується перепадом тиску на псевдозрідженому шарі в межах
, яка однозначно характеризується перепадом тиску на псевдозрідженому шарі в межах ![]() .
.
Для роботи установки, яка здійснює зневоднення і гранулювання продуктів необхідно підтримувати сталим (максимальним) коефіцієнт гранулоутворення, оскільки він є основним якісним і кількісним показником при виготовленні готової продукції.
Як незалежні змінні, що впливають на роботу установки, взяті узагальнені параметри:
1. перепад тиску (різниця між тиском над і під газорозподільною решіткою);
2. температура шару;
3. швидкість зріджуючого агента.
Як параметр оптимізації був вибраний коефіцієнт гранулоутворення.
Мета експерименту, що проводиться, – пошук оптимальних (найкращих) параметрів установки і режимів її роботи, при яких забезпечується максимальний вихід готової продукції.
Для отримання залежності вибрано модель неповного 2-го порядку ![]()
Така структура моделі вибрана у зв’язку з тим, що модель 1-го порядку характеризується суттєвою лінійністю, а модель 2-го порядку потребує різкого збільшення об’єму експериментальних досліджень.
Для побудови залежностей ![]() і
і ![]() використовувався повний факторний експеримент типу
використовувався повний факторний експеримент типу ![]() [1]. Рівні і інтервали варіювання змінних приведені в табл. 1, а матриця планування і результати експерименту – в табл. 2.
[1]. Рівні і інтервали варіювання змінних приведені в табл. 1, а матриця планування і результати експерименту – в табл. 2.
Таблиця 1
|
Незалежні змінні |
Рівні варіювання |
Інтервал варіювання |
||
|
–1 |
0 |
+1 |
||
|
|
1900 |
2150 |
2400 |
250 |
|
|
90 |
95 |
100 |
5 |
|
|
3,141 |
4,398 |
5,655 |
1,257 |
У таблиці прийняті наступні позначення: 0 – основний рівень; +1 – верхній рівень; –1 – нижній рівень.
Таблиця 2
|
№ |
Планування |
Параметри оптимізації |
Дисперсія |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
+1 |
–1 |
–1 |
–1 |
+1 |
+1 |
+1 |
–1 |
81,7 |
82,1 |
80,5 |
81,43 |
81,87 |
0,19 |
|
2 |
+1 |
+1 |
–1 |
–1 |
–1 |
–1 |
+1 |
+1 |
92,4 |
89,5 |
90,2 |
90,7 |
90,07 |
0,4 |
|
3 |
+1 |
–1 |
+1 |
–1 |
–1 |
+1 |
–1 |
+1 |
85,1 |
76,5 |
84,7 |
82,1 |
82,73 |
0,4 |
|
4 |
+1 |
+1 |
+1 |
–1 |
+1 |
–1 |
–1 |
–1 |
70,8 |
68,2 |
69,6 |
69,53 |
69,1 |
0,19 |
|
5 |
+1 |
–1 |
–1 |
+1 |
+1 |
–1 |
–1 |
+1 |
89,3 |
80,3 |
84,7 |
84,77 |
84,33 |
0,19 |
|
6 |
+1 |
+1 |
–1 |
+1 |
–1 |
+1 |
–1 |
–1 |
74,7 |
68,7 |
77,5 |
73,63 |
74,27 |
0,4 |
|
7 |
+1 |
–1 |
+1 |
+1 |
–1 |
–1 |
+1 |
–1 |
75,4 |
64,0 |
63,3 |
67,57 |
66,93 |
0,4 |
|
8 |
+1 |
+1 |
+1 |
+1 |
+1 |
+1 |
+1 |
+1 |
72,6 |
73,4 |
67,4 |
71,13 |
71,57 |
0,19 |
Експерименти проводили тільки на двох рівнях, рівні чинників є межі досліджуваної області по даному параметру. Точка з координатами ![]() є центром плану, або основним рівнем;
є центром плану, або основним рівнем; ![]() – інтервал варіювання але осі
– інтервал варіювання але осі ![]() . Від системи координат
. Від системи координат ![]() перейдемо до нової безрозмірної системи координат
перейдемо до нової безрозмірної системи координат ![]() за допомогою наступного лінійного перетворення:
за допомогою наступного лінійного перетворення:
![]() (2)
(2)
У безрозмірній системі координат верхній рівень відповідає +1, нижній рівень –1, координати центру плану рівні і співпадають з початком координат.
Коефіцієнти рівняння регресії по методу найменших квадратів визначають наступним чином
 (3)
(3)
Отже, будь-який коефіцієнт рівняння регресії ![]() визначається скалярним добутком стовпця
визначається скалярним добутком стовпця ![]() на відповідний стовпець
на відповідний стовпець ![]() діленим на число дослідів в матриці планування
діленим на число дослідів в матриці планування ![]() :
:
 (4)
(4)
Оскільки коваріаційна матриця ![]() для спланованого експерименту діагональна
для спланованого експерименту діагональна
 (5)
(5)
то коефіцієнти рівняння регресії не корельовані між собою. Значущість коефіцієнтів рівняння регресії можна перевіряти для кожного коефіцієнта окремо по критерію Стьюдента. Діагональні елементи коваріаційної матриці рівні між собою, тому всі коефіцієнти рівняння визначаються з однаковою точністю:
![]() (6)
(6)
Для всіх коефіцієнтів рівняння регресії складають співвідношення
 (7)
(7)
яке порівнюють з табличним ![]() для рівня значущості
для рівня значущості ![]() і числа ступенів свободи
і числа ступенів свободи ![]() . Якщо
. Якщо ![]() , то приймають гіпотезу рівності нулю генерального коефіцієнта регресії, а відповідний вибірковий коефіцієнт, як незначущий, відсівають з рівняння регресії. При цьому зважаючи на ортогональність матриці планування решту коефіцієнтів не доводиться перераховувати.
, то приймають гіпотезу рівності нулю генерального коефіцієнта регресії, а відповідний вибірковий коефіцієнт, як незначущий, відсівають з рівняння регресії. При цьому зважаючи на ортогональність матриці планування решту коефіцієнтів не доводиться перераховувати.
В результаті проведення експерименту і обробки експериментальної інформації з урахуванням формул (4) – (7) отримано наступне рівняння:
![]() (8)
(8)
де – ![]()
Оцінка значущості коефіцієнтів показала, що:
Таблиця 3
|
№ |
Коефіцієнти регресійної моделі |
Рівень значущості |
Коефіцієнт Стьюдента |
Значущість |
|
b0 |
77,61 |
205,1 |
1,75 |
значущий |
|
b1 |
–1,36 |
3,59 |
1,75 |
значущий |
|
b2 |
–5,03 |
13,28 |
1,75 |
значущий |
|
b3 |
–3,33 |
8,81 |
1,75 |
значущий |
|
b12 |
–0,89 |
2,36 |
1,75 |
значущий |
|
b13 |
–0,53 |
1,41 |
1,75 |
не значущий |
|
b23 |
0,1 |
0,26 |
1,75 |
не значущий |
|
b123 |
4,57 |
12,07 |
1,75 |
значущий |
коефіцієнти при ![]() і
і ![]() не значущі. Тому отримуємо математичну модель в наступному вигляді:
не значущі. Тому отримуємо математичну модель в наступному вигляді:
![]() (9)
(9)
Для перевірки адекватності отриманої моделі був використаний критерій Фішера. Значення розрахованого параметра ![]() не перевищує критичного (табличного)
не перевищує критичного (табличного) ![]() , тобто виконується нерівність
, тобто виконується нерівність ![]() , звідси робимо висновок, що отримана математична модель є адекватною процесу, що досліджувався.
, звідси робимо висновок, що отримана математична модель є адекватною процесу, що досліджувався.
З аналізу регресійної моделі видно, що найбільший вплив на вихідний параметр надає параметр ![]() , а найменший –
, а найменший – ![]() , так, як коефіцієнт при ньому найменший. Для більш детального вивчення впливу кожної зі змінних
, так, як коефіцієнт при ньому найменший. Для більш детального вивчення впливу кожної зі змінних ![]() на вихідний параметр
на вихідний параметр ![]() побудуємо залежності
побудуємо залежності ![]() при фіксованих значеннях інших
при фіксованих значеннях інших ![]() змінних в центрі експерименту (рис. 1). Усі графіки являють собою прямі, що проходять через центр експерименту.
змінних в центрі експерименту (рис. 1). Усі графіки являють собою прямі, що проходять через центр експерименту.
 (10)
(10)
Щоб отримати координати екстремуму цільової функції, прирівняли до нулю похідні по факторам і розв’язали отриману систему лінійних рівнянь
 (11)
(11)
де розв`язок системи: ![]() . Тобто параметри процесу набудуть наступних значень:
. Тобто параметри процесу набудуть наступних значень: ![]()
Отримані координати центра експерименту зсунуті відносно координат в яких проводились досліди. Це свідчить про те, що номінальні значення незалежних змінних вибрані неточно, але основною метою експериментів був пошук області оптимальних значень розглядуваного хіміко-технологічного процесу, яка представлена на рис. 1.
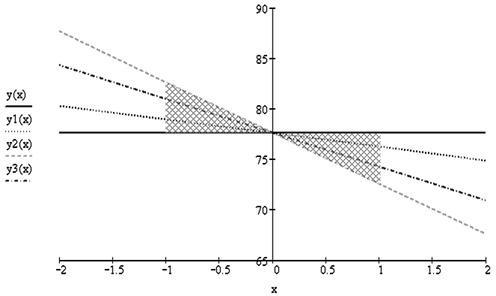
Рис 1 Графіки функції ![]() для вибору оптимальної зони процесу зневоднення і гранулоутворення
для вибору оптимальної зони процесу зневоднення і гранулоутворення
Висновки
Результати, отримані за допомогою математичної моделі підтверджують технологічні параметри робочого режиму установки.
Такий підхід до розв’язку задачі оптимізації процесу гранулоутворення у псевдозрідженому шарі може бути застосований для більшої кількості технологічних параметрів. Для врахування обмеження по гранулометричному складу можна отримати регресійну модель еквівалентного діаметра від технологічних параметрів і розв’язати, як задачу умовної оптимізації.
For process fluidization and granulating in the device with the fluidized bad was carried the search of a zone of optimum values of variable technological process which influence factor granulating, the mathematical model of process is constructed which takes into account all factors, which influence a qualitative and quantitative parameter of process fluidization. The adequacy to mathematical model of process is checked up. By results of accounts are received the zones of optimum values of parameters of chemical-technological process.
1. Планирование эксперимента в технике / В.И. Барабащук, Б.П. Креденцер, В.И. Мирошниченко; Под ред. Б.П. Креденцера. – Техніка, 1984. – 200 с., ил. – (Б-ка инженера). – Библиогр.: с. 196–198.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Оптимальное управление объектами и системами
Бойченко О.В. Оптимізація роботи інформаційно-телекомунікаційних систем спеціального призначенняТимченко В.Л. Формирование динамических принципов управления подвижным объектом на основе метода структурно ― переключаемых обратных связей
Лебеденко Ю.О., Рудакова Г.В. Модель нечіткого виводу для оптимального управління перетворювачем частоти в системах автономного живлення
Ладанюк А.П., Кроніковський Д.О. Екстремальна адаптивна система з непараметричною ідентифікацією та багатопараметричним регулятором
Ладієва Л.Р., Дубік Р.М. Оптимальне керування процесом контактної мембранної дистиляції
Писаренко А.В., Дробот І.Ю. Алгоритм синтезу систем зі змінною структурою у ковзному режимі
Погребняк И.Ф. Формализация проблемы управления организационными системами в условиях неопределенности
Батюк С.Г., Олійник С.Ю. Методика оптимальної фільтрації даних температурного контролю турбогенераторів в умовах значних промислових перешкод.
Дорогов А.Ю., Лесных В.Ю., Раков И.В., Титов Г.С. Алгоритмы оптимального движения мобильных объектов по пересеченной местности и транспортной сети
Михайленко В.С., Ложечников В.Ф. Сравнительный анализ комплексного и нечеткого регуляторов при управлении многомерным объектом
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Мінімізація токсичності продуктів згорання та втрат теплоти у топкових пристроях з рециркуляцією продуктів згорання на основі узагальненого критерію оптимізації
Луцька Н.М., Заєць Н.А., Ладанюк А.П. Синтез та порівняння багатовимірних регуляторів для колонної дифузійної установки цукрового заводу.
Ладієва Л.Р., Зав'ялова Т.П. Оптимізація плівкового апарату роторного типу за максимальною продуктивністю
Лебеденко Ю.О. Оптимальне управління безпосереднім перетворювачем частоти за критерієм мінімізації негативного впливу на живильну мережу
Тарасюк В.П., Алдохіна А.С. Основні положення методики побудови оптимального розкладу управління обладнанням паралельних технологічних процесів на основі експертних оцінок.
Стопакевич А.А. Новые соотношения для синтеза цифровых оптимальных одномерных систем управления для объектов с запаздыванием.
Ладієва Л.Р.,. Жулинський О.А Оптимізація установки контактної мембранної дистиляції.
Батурінець Є. В., Пасенченко Ю. А. Управління матеріальними запасами з обмеженнями на складські приміщення
Смітюх Я.В., Кишенько В. Д. Оптимізація управління процесами брагоректифікації.
Рябкин Ю.В, Карнаух В.В. Квазиоптимальная обработка коротких радиоимпульсов в акустооптическом спектроанализаторе.
Песчанский А.И. Оптимальное техническое обслуживание двухкомпонентной параллельной системы с учетом наработки каждого элемента.
Лебеденко Ю.А. Исследование непосредственного преобразователя частоты с оптимальным управлением.
Исаев Е.А., Чернецкая И.Е., Завальнюк О.П. К вопросу принятия решений при оптимизации гранулирования рыбной муки в барабане.
Кириллов О.Л., Якимчук Г.С. Оптимальное управление технологическим процессом заполнения слабопроводящими заряжающимися жидкостями (СПЗЖ) замкнутых объемов.
Водічев В.А. Порівняльний аналіз швидкодії алгоритмів керування у системі оптимізації технологічного процесу металообробки.
Поливода О.В., Бражник А.М. Метод компенсации ошибок идентификации при оптимальном управлении
Марасанов В.В., Забитовская О.И., Щербина Е.В. Энтропийные методы оптимизации гравитационных моделей.
Балтовский А.А. Синтез оптимального закона управления большой системой на основе композиции локальных оптимальных решений
Луцька Н.М. Синтез оптимальних регуляторів для систем автоматизації технологічних комплексів неперервного типу.
Кондратенко Г. В., Кондратенко Ю. П., Мухортова К. В. Синтез нечетких регуляторов на основе объектно-ориентированных технологий.
Чернецкая И.Е., Исаев Е.А., Лебеденко Ю.А. Система автоматической оптимизации окомкования железорудного концентрата в условиях ЦГОКа
Червинський В.В., Бессараб В.І. Ієрархічна система оптимального управління установкою з газифікації вугілля методом напівкоксування з циркулюючим киплячим шаром
Усов А. В., Дубров К. А. Оптимизация и управление термомеханическими процессами при получении феррокерамических изделий для отклоняющих систем
Кучеров Д.П. Алгоритм обучения субоптимальному по быстродействию управлению динамической системой второго порядка без нулевых полюсов
Ладанюк А.П., Луцька Н.М., Лобок О.П. Розробка багатовимірних оптимальних регуляторів для об'єктів одного класу.
Маломуж Т.В. Оптимальное управление на основе интеллектуальных систем
Марончук И.Е., Кучерук А.Д., Данилец Е.В., Ерохин С.Ю., Чорный И.В. Опти-мизация двухкоординатных позиционно-чувствительных фотоприемников.