УДК 681.51: 681.3
ОПТИМАЛЬНЕ
КЕРУВАННЯ ПРОЦЕСОМ
КОНТАКТНОЇ МЕМБРАННОЇ ДИСТИЛЯЦІЇ
Вступ
Задачі отримання чистої і високоякісної води з вод різної солоності, очистка стічних вод, концентрування солей з промивних вод можуть вирішуватись за допомогою перспективного методу контактної мембранної дистиляції (КМД). Ефективність процесу значно зростає при оптимізації цього процесу. При оптимальному керуванні процесом основні проблеми пов’язані з вибором критерію оптимальності і методу розв’язку задачі.
Запропоновано побудову оптимального лінійного закону керування як задачі багатокритеріальної оптимізації з використанням методу досягнення цілі (досягнення цілі Гембіки). І порівняно результати такого підходу з відомими способами: лінійно квадратичною оптимізацію і з розміщенням полюсів замкненої системи.
В статті розглянуто процес розділення розчинів, де основним елементом є порувата гідрофобна мембрана, що представляє собою селективний бар’єр, через який проходять пари розчинника. В одному каналі мембрани рухається більш нагрітий розчин, в іншому каналі рухається більш холодний дистилят з чистого розчинника. Завдяки різниці парціальних тисків насиченої пари розчинника з боку гарячого розчину випаровується пара, яка дифундує через пори мембрани і конденсується на мембрані з боку холодного розчину.
Для цілей керування розроблена математична модель процесу КМД (1), що враховує переніс тепла крізь полімерну структуру мембрани та з потоком пари розчинника [1], що включає в себе рівняння динаміки для каналів розчину і дистиляту, і рівняння матеріального балансу для цільового продукту. Дифузійний масо переніс через мембрану розглядається для перехідного режиму течії.
![]() , (1)
, (1)
де  ;
;  ;
;
 - швидкість подачі розчину і дистиляту
- швидкість подачі розчину і дистиляту  ;
;  - температура розчину солі і дистиляту на
вході в мембранний модуль (ММ),
- температура розчину солі і дистиляту на
вході в мембранний модуль (ММ),  ;
;  - температура розчину і дистиляту на виході з
ММ, ;
- температура розчину і дистиляту на виході з
ММ, ;  - відповідно початкова і кінцева концентрація солі,
- відповідно початкова і кінцева концентрація солі,  ;
;
початкові умови:  ;
;
каналом керування було обрано ”швидкість подачі розчину – перепад температур
на виході мембранного модуля”, тобто ![]() .
.
Для оптимального керування був обраний оптимальний лінійний регулятор з квадратичним показником якості
![]() , (2)
, (2)
де Q – матриця вагових коефіцієнтів, r – ваговий коефіцієнт.
Оптимальне керування обчислювалося у вигляді
![]() , (3)
, (3)
де K – оптимальна матрична ланка зворотного зв’язку
![]() , (4)
, (4)
а P знаходилась з розв’язку матричного нелінійного рівняння Рікатті
 (5)
(5)
Також розраховувались власні значення E замкненої системи
![]() (6)
(6)
Для порiвняння отриманих резудьтатiв використано метод, що базується на розміщеннi полюсів за допомогою зворотного зв’язку за станом. Відповідний метод базується на використанні зворотного зв’язку по всім змінним стану. При цьому корені характеристичного рівняння (7) розміщуються так, щоб перехідний процес системи задовольняв висунутим вимогам.
![]() , (7)
, (7)
де ![]() – задані значення полюсів системи
замкнено системи
– задані значення полюсів системи
замкнено системи ![]() , що були отримані з попереднього способу.
, що були отримані з попереднього способу.
Оптимальне керування має вигляд (3), а матричний коефіцієнт підсилення, має вигляд
![]() , (8)
, (8)
тоді
![]() (9)
(9)
Третій спосіб – це метод досягнення цілі (досягнення цілі Гембіки), що відноситься до методів багатокритеріальної оптимізації [2].
Наведемо загальну постановку задачі. Дана
постановка включає вираз для декілька намірів ![]() ,
який пов'язаний з декількома цілями Е(K) =
{Е1(K), Е2(K), Е3(K)} тобто з власними значеннями замкненої системи. Таке формулювання
задачі допускає, що мета може бути або недо - або передосягненою, і що дає можливість
відносно точно виразити початкові наміри. Відносний ступінь недо - або
передосягненості поставлених намірів контролюється за допомогою вектора
зважених коефіцієнтів Ω = {ω1,ω2,ω3}
і представлений як стандартна
задача оптимізації за допомогою наступного формулювання
,
який пов'язаний з декількома цілями Е(K) =
{Е1(K), Е2(K), Е3(K)} тобто з власними значеннями замкненої системи. Таке формулювання
задачі допускає, що мета може бути або недо - або передосягненою, і що дає можливість
відносно точно виразити початкові наміри. Відносний ступінь недо - або
передосягненості поставлених намірів контролюється за допомогою вектора
зважених коефіцієнтів Ω = {ω1,ω2,ω3}
і представлений як стандартна
задача оптимізації за допомогою наступного формулювання
![]() (10)
(10)
за умови, що
![]() .
.
Член ωiγ вносить в дану задачу елемент послаблення, що, інакше кажучи, позначає жорсткість заданого наміру. Ваговий вектор Ω дає можливість достатньо точно виразити міру взаємозв'язку між двома цілями. Наприклад, установка вагового вектора Ω як рівного початковому наміру указує на те, що досягнутий той же самий відсоток недо - або передосягнення цілі Е*. За допомогою установки в нуль окремого вагового коефіцієнта (тобто Ωi = 0) можна внести жорсткі обмеження в поставлену задачу. Метод досягнення цілі має певні переваги, а саме, на нього може бути накладена задача нелінійного програмування.. В задачі програмування досягнення цілі знайдена більш відповідна функція цілі, яка отримана шляхом накладення рівняння (11) на задачу мінімакса
![]() (11)
(11)
де
![]()
Враховуючи висновки Брайтона [2] для мінімаксної оптимізації на основі методу квадратичного програмування, для задачі досягнення цілі згідно рівнянню (12) приводить до наступної постановки задачі
![]() (12)
(12)
Хоча функція цілі згідно рівнянню (11) використовується як основа процедури лінійного пошуку, то, хоча Ψ(K,γ) може і зменшуватися для якогось кроку в заданому напрямі пошуку, максимум функції Λi може, як це не парадоксально, збільшуватися. Це знаходиться у згоді з погіршенням найсприятливішої цілі. Оскільки найнесприятливіша ціль також є частиною значення цільової функції γ, то в даному випадку допускається якийсь крок, який, збільшує цільову функцію, що підлягає мінімізації. І навпаки величина ψ(K,γ) може зростати при зменшенні максимуму Λi тим самим, маючи на увазі якесь відкидання кроку, що приводить до покращення найсприятливішої цілі.
Унаслідок швидкої збіжності методу послідовно квадратичного програмування, вимога, що б функція цілі строго зменшувалася, іноді приводить до більшого числа розрахунків функції при упровадженні методу послідовно квадратичного програмування з використанням функції цілі.
Більш конкретизуємо постановку задачі для
даного прикладу. Система описується рівняннями (8). Задані значення
полюсів системи з замкненим контуром визначаються з матриць А, B
та K тобто, цільова функція ![]() задається як власні значення
задається як власні значення ![]() . Бажані значення полюсів системи з замкненим контуром
повинні бути на дійсній вісі комплексної півплощини
. Бажані значення полюсів системи з замкненим контуром
повинні бути на дійсній вісі комплексної півплощини ![]() ,
, ![]() - оптимальний матричний коефіцієнт підсилення. Причому, жоден з елементів матриці K не може перевищувати
- оптимальний матричний коефіцієнт підсилення. Причому, жоден з елементів матриці K не може перевищувати ![]() або бути менше ніж
або бути менше ніж ![]() .
.
Після трьох ітерацій отримано: оптимальний
матричний коефіцієнт підсилення ![]() ; максимальне порушення обмеження
; максимальне порушення обмеження ![]() ; коефіцієнт досягнення
; коефіцієнт досягнення ![]() указує, що ціль точно була досягнута.
указує, що ціль точно була досягнута.
Для забезпечення однакової частки для пере-
або не досягнення в активній цілі в даному розв’язку вагова матриця ![]() задається як абсолютні значення
задається як абсолютні значення ![]() .
.
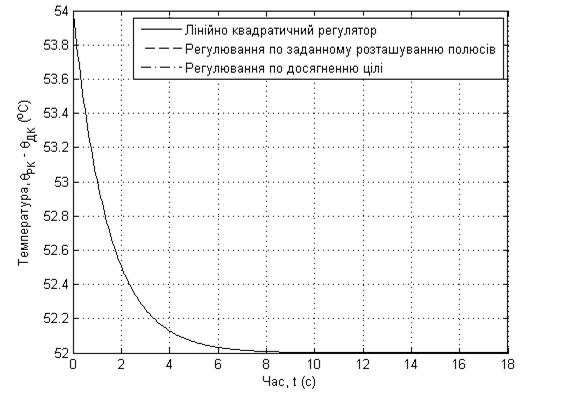
Рис. 1. Перехідні процеси «Швидкiсть подачi розчину – перепад температур на виходi мембранного модуля»
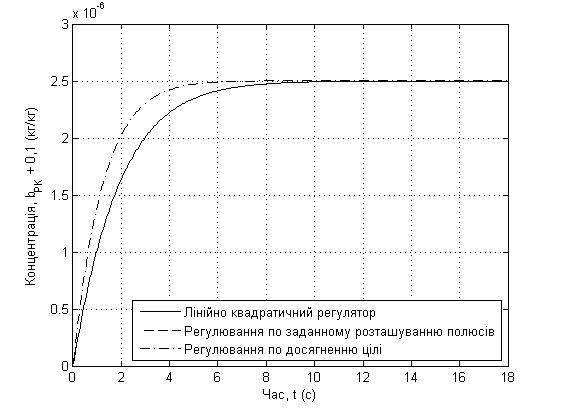
Рис. 2. Перехідні процеси «Швидкiсть подачi розчину – концентрація розчину солі»
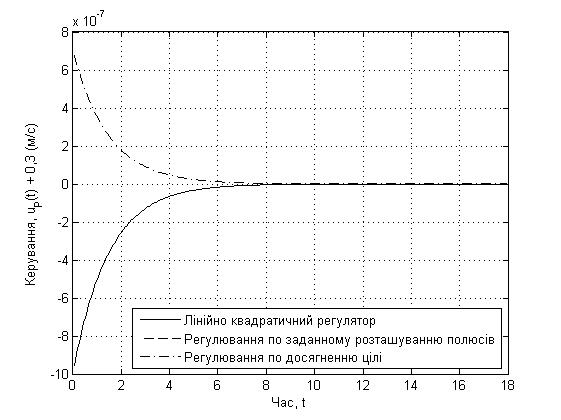
Рис. 3. Оптимальні керування
Висновки
Перехідні процеси системи керування за
каналами ![]() і
і ![]() отримані розглянутими способами і представлені на рис. 1, 2
відповідно. Як видно з графіків якість перехідного процесу з використанням
методу досягнення цілі краща у порівнянні з іншими методами. На рис. 3 показані
траєкторії оптимального керування розрахована різними способами. На основі
отриманих результатів можна зробити висновок, що для синтезу закону керування
процесом КМД можна використовувати метод досягнення цілі.
отримані розглянутими способами і представлені на рис. 1, 2
відповідно. Як видно з графіків якість перехідного процесу з використанням
методу досягнення цілі краща у порівнянні з іншими методами. На рис. 3 показані
траєкторії оптимального керування розрахована різними способами. На основі
отриманих результатів можна зробити висновок, що для синтезу закону керування
процесом КМД можна використовувати метод досягнення цілі.
ЛIТЕРАТУРА
1. Дубік Р.М. Математична модель розділення неоднорідних рідких систем. / Р.М.Дубік, Л.Р. Ладієва // Автоматика. Автоматизация. Электротехнические комплексы и системы. -2009. - №1(23). - с. 49-54.
2. Жученко А.I. Нелiнiйне програмування з використанням MATLAB. / А.I. Жученко, Л.Р. Ладiєва, Р.М. Дубiк // НТУУ «КПI». -2008. –с. 50-56.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Оптимальное управление объектами и системами
Бойченко О.В. Оптимізація роботи інформаційно-телекомунікаційних систем спеціального призначенняТимченко В.Л. Формирование динамических принципов управления подвижным объектом на основе метода структурно ― переключаемых обратных связей
Лебеденко Ю.О., Рудакова Г.В. Модель нечіткого виводу для оптимального управління перетворювачем частоти в системах автономного живлення
Ладанюк А.П., Кроніковський Д.О. Екстремальна адаптивна система з непараметричною ідентифікацією та багатопараметричним регулятором
Писаренко А.В., Дробот І.Ю. Алгоритм синтезу систем зі змінною структурою у ковзному режимі
Погребняк И.Ф. Формализация проблемы управления организационными системами в условиях неопределенности
Батюк С.Г., Олійник С.Ю. Методика оптимальної фільтрації даних температурного контролю турбогенераторів в умовах значних промислових перешкод.
Дорогов А.Ю., Лесных В.Ю., Раков И.В., Титов Г.С. Алгоритмы оптимального движения мобильных объектов по пересеченной местности и транспортной сети
Михайленко В.С., Ложечников В.Ф. Сравнительный анализ комплексного и нечеткого регуляторов при управлении многомерным объектом
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Мінімізація токсичності продуктів згорання та втрат теплоти у топкових пристроях з рециркуляцією продуктів згорання на основі узагальненого критерію оптимізації
Луцька Н.М., Заєць Н.А., Ладанюк А.П. Синтез та порівняння багатовимірних регуляторів для колонної дифузійної установки цукрового заводу.
Корнієнко Б.Я., Снігур О.В. Оптимізація параметрів процесу зневоднення і гранулоутворення в апараті псевдозрідженого шару
Ладієва Л.Р., Зав'ялова Т.П. Оптимізація плівкового апарату роторного типу за максимальною продуктивністю
Лебеденко Ю.О. Оптимальне управління безпосереднім перетворювачем частоти за критерієм мінімізації негативного впливу на живильну мережу
Тарасюк В.П., Алдохіна А.С. Основні положення методики побудови оптимального розкладу управління обладнанням паралельних технологічних процесів на основі експертних оцінок.
Стопакевич А.А. Новые соотношения для синтеза цифровых оптимальных одномерных систем управления для объектов с запаздыванием.
Ладієва Л.Р.,. Жулинський О.А Оптимізація установки контактної мембранної дистиляції.
Батурінець Є. В., Пасенченко Ю. А. Управління матеріальними запасами з обмеженнями на складські приміщення
Смітюх Я.В., Кишенько В. Д. Оптимізація управління процесами брагоректифікації.
Рябкин Ю.В, Карнаух В.В. Квазиоптимальная обработка коротких радиоимпульсов в акустооптическом спектроанализаторе.
Песчанский А.И. Оптимальное техническое обслуживание двухкомпонентной параллельной системы с учетом наработки каждого элемента.
Лебеденко Ю.А. Исследование непосредственного преобразователя частоты с оптимальным управлением.
Исаев Е.А., Чернецкая И.Е., Завальнюк О.П. К вопросу принятия решений при оптимизации гранулирования рыбной муки в барабане.
Кириллов О.Л., Якимчук Г.С. Оптимальное управление технологическим процессом заполнения слабопроводящими заряжающимися жидкостями (СПЗЖ) замкнутых объемов.
Водічев В.А. Порівняльний аналіз швидкодії алгоритмів керування у системі оптимізації технологічного процесу металообробки.
Поливода О.В., Бражник А.М. Метод компенсации ошибок идентификации при оптимальном управлении
Марасанов В.В., Забитовская О.И., Щербина Е.В. Энтропийные методы оптимизации гравитационных моделей.
Балтовский А.А. Синтез оптимального закона управления большой системой на основе композиции локальных оптимальных решений
Луцька Н.М. Синтез оптимальних регуляторів для систем автоматизації технологічних комплексів неперервного типу.
Кондратенко Г. В., Кондратенко Ю. П., Мухортова К. В. Синтез нечетких регуляторов на основе объектно-ориентированных технологий.
Чернецкая И.Е., Исаев Е.А., Лебеденко Ю.А. Система автоматической оптимизации окомкования железорудного концентрата в условиях ЦГОКа
Червинський В.В., Бессараб В.І. Ієрархічна система оптимального управління установкою з газифікації вугілля методом напівкоксування з циркулюючим киплячим шаром
Усов А. В., Дубров К. А. Оптимизация и управление термомеханическими процессами при получении феррокерамических изделий для отклоняющих систем
Кучеров Д.П. Алгоритм обучения субоптимальному по быстродействию управлению динамической системой второго порядка без нулевых полюсов
Ладанюк А.П., Луцька Н.М., Лобок О.П. Розробка багатовимірних оптимальних регуляторів для об'єктів одного класу.
Маломуж Т.В. Оптимальное управление на основе интеллектуальных систем
Марончук И.Е., Кучерук А.Д., Данилец Е.В., Ерохин С.Ю., Чорный И.В. Опти-мизация двухкоординатных позиционно-чувствительных фотоприемников.