УДК 62-52
РЕГУЛЯТОР ПЕРЕМЕННОЙ СТРУКТУРЫ ДЛЯ
ОБЪЕКТОВ ТЕХНОЛОГИЧЕСКОГО ТИПА
Хобин В.А.
В условиях возрастания требований к точности соблюдения режимными переменными объектов управления (ОУ) установленных регламентов и роста потерь при их нарушениях, задача совершенствования алгоритмов регулирования сохраняет свою актуальность и остается в числе традиционных задач теории автоматического управления. Вместе с тем, как показывает практика, когда в качестве объектов управления выступают технологические агрегаты (процессы) (ТА ТП), то разработчики систем автоматического регулирования (САР), в подавляющем большинстве случаев используют простейшие ПИ-, ПИД-алгоритмы регулирования. Это обстоятельство может быть объяснено следующими двумя взаимообусловленными факторами.
Во-первых, ТА как ОУ имеют специфические особенности по сравнению с такими объектами, как манипуляторы, электропривод, усилители, транспортные (мобильные) средства. Основные из них: а) физическая распределенность каналов управления ТА, проявляющаяся в значительных запаздываниях реакции управляемых переменных на управляющие воздействия; б) большое количество факторов весьма существенно влияющих на работу ТА, но практически недоступных для измерения (характеристики сырьевых и энергетических потоков, состояние рабочих органов и активных зон ТА), проявляющихся как неконтролируемые возмущения (координатные, параметрические), и изменяющие значения управляемых переменных, свойства каналов управления, оптимальные режимы работы ТА; в) критерий (функционал) оптимальности управления не включает в себя составляющих, штрафующих скорости изменения управляющих воздействий, т.е. он не имеет вида критерия «обобщенной работы». Эти особенности ОУ технологического типа делают совершенно неоправданными как «копирование» самих алгоритмов регулирования, разработанных для других типов объектов, так и методов разработки этих алгоритмов.
Во-вторых, для ПИД-регуляторов, используемых в САР, для объектов технологического типа имеется инфраструктура инженерной поддержки их применения. Она включает в себя типовые модели динамики каналов регулирования, упрощенные процедуры параметрической идентификации этих типовых моделей, типовые методики расчета настроечных параметров регуляторов или их начальных приближений, типовые аппаратные и программные средства, реализующие эти алгоритмы [1]. Эта инфраструктура сложилась, эволюционируя в ходе практического применения всех ее компонентов. Это гарантирует работоспособность разработанных типовых САР на этапе их внедрения.
ПИД-алгоритм регулирования (регулятор) можно рассматривать как базовый для построения САР объектами технологического типа. То есть такой регулятор, который: а) представляет собой целостный алгоритмический модуль, который может использоваться как регулятор локальной САР технологическим контуром, или в качестве составляющей более сложного алгоритма; б) имеющий фиксированную (закрытую для изменений) структуру, и позволяющий пользователю производить только его параметрическую настройку; в) сопровождаемый инженерными методиками квазиоптимальной настройки; г) имеющий техническую поддержку в форме доступного для применения аппаратного и (или) программного обеспечения, реализующего алгоритм.
Очевидно, что сколько-нибудь широкое применение вместо базового ПИД- алгоритма, новых, более эффективных алгоритмов, возможно только тогда, когда они смогут претендовать на роль базовых.
Сформулируем основные требования, которым должен отвечать регулятор, претендующий стать альтернативой ПИД-регулятору [2, 3]: а) эффективная (т.е. с высокой динамической точностью и низкой интенсивностью случайных выбросов этой переменной за установленный уровень) стабилизация регулируемых переменных ОУ в окрестности заданного значения; б) быстрый и без значительных перерегулирований перевод регулируемых переменных от значений, которые отвечают режиму холостого хода ОУ, к их значениям, которые отвечают номинальному режиму; в) сохранение перечисленных выше свойств САР при значительных вариациях характеристик ОУ и внешних действий, в том числе при их значительной априорной неопределенности (робастность); г) простота настройки алгоритма для пользователя, в частности его перенастройки при использовании в составе адаптивных САР.
Разработку таких алгоритмов необходимо вести отказавшись от формальных (аналитических) методов синтеза, в частности использующих методы аналитического конструирования регуляторов [4]. Это обусловлено тем, что для нестационарных нелинейных систем с запаздыванием в замкнутом контуре, получить выражение в явном виде аналитического решения системы уравнений, описывающее САР без специальных упрощений, в том числе – статистической линеаризации нелинейности, разложения трансцендентных передаточных функций запаздывания в ряд Паде и т.д., невозможно. Но и с этими упрощениями полученные выражения весьма сложны, что делает их непосредственный анализ практически невозможным.
Конструктивным для объектов технологического типа является эвристический подход, основанный на опыте, накопленном разработчиками САР, углубленных исследованиях уже апробированных на практике алгоритмов, их совершенствования, объединения в целостные альтернативные варианты алгоритмов с последующей их параметрической оптимизацией и сравнительными исследованиями в различных условиях в ходе специально организованных машинных экспериментов. В качестве таких алгоритмов использовались: а) базовый ПИД-алгоритм регулирования; б) алгоритмы коммутации структуры регулятора, в частности коммутации его настроечных параметров; в) алгоритмы прогнозирования свободного движения САР в замкнутом контуре на время запаздывания вперед; г) алгоритмы «безударного» замыкания и размыкания контура регулирования. В соответствии с таким подходом, после предшествующих исследований структура регулятора (алгоритма регулирования), как претендующего на альтернативу ПИД-регулятору, изображена на рис. 1.
Функционально регулятор можно представить состоящим из пяти модулей: задания (МЗД), динамической зоны нечувствительности (МДЗН), основного алгоритмического (МОА), прогнозирования движения ОУ под воздействием управления (МПР), формирования управляющих воздействий (МФУВ) для управления исполнительными механизмами двух принципиально разных типов – ПИМ - пропорциональным исполнительным механизмом и ИИМПС - интегрирующим исполнительным механизмом постоянной скорости (через ШИМ - широтноимпульсный модулятор). Регулятор является регулятором переменной структуры и включает в себя пять (y-ячеек (коммутаторов сигналов).
Отметим, что системы с переменной структурой возникли как средство эффективного управления движением мобильными объектами по заданной траектории [5]. Эффективность обеспечивало специфическое свойство скользящих режимов, при которых достигался высокий уровень инвариантности траектории движения относительно параметров объекта. Попытки использовать это свойство при управлении технологическими объектами, включая разработку и производство специальных регуляторов [6] успеха не имели. Причина этого, как уже отмечалось – принципиальное отличие свойств мобильных и технологических объектов, как ОУ и сред (условий), в которых они функционируют, близость наиболее эффективных режимов работы объекта к предельно-допустимым, нарушения которых приводит к возникновению аварийных ситуаций. Вместе с тем идея коммутации структуры регулятора может быть достаточно плодотворна вне зависимости от реализации скользящих режимов.
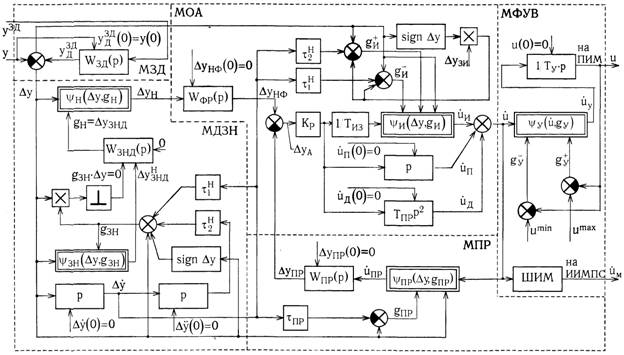
Рис. 1 Структурная схема базового регулятора переменной структуры (РПС)
Модули РПС описываются следующими системами уравнений.
1. Модуль задания (МЗД):
 (1)
(1)
где y(t) – регулированная переменная;
узд(t), ![]() - соответственно заданное значение регулированной переменной и ее «динамическое значение» с ограниченной скоростью нарастания;
- соответственно заданное значение регулированной переменной и ее «динамическое значение» с ограниченной скоростью нарастания;
Tзд - постоянная времени инерционности задатчика, ограничивающая скорость изменения ![]() при изменении узд(t).
при изменении узд(t).
2. Модуль динамической зоны нечувствительности (МДЗН):
 (2)
(2)
где gзн(t), gн(t) - функции переключения yзн и yн;
Dузнд(t), ![]() , Dузн,
, Dузн, ![]() - текущее, начальное и минимальное значения зоны нечувствительности, скорость изменения Dузнд(t);
- текущее, начальное и минимальное значения зоны нечувствительности, скорость изменения Dузнд(t);
t1 - текущее время, отсчет которого начинается при t = 0 и возобновляется каждый раз, когда gзн(t)×Dy(t) = 0;
![]() ,
, ![]() - настроечные параметры gзн(t);
- настроечные параметры gзн(t);
Tзнд - постоянная времени - настроечный параметр, определяющий скорость уменьшения Dyзнд(t), при t1 ® ¥.
3. Модуль основной алгоритмический (МОА):
 (3)
(3)
где ![]() ,
, ![]() ,
, ![]() - скорости изменения соответственно интегрирующей, пропорциональной и дифференцирующей составляющих u(t);
- скорости изменения соответственно интегрирующей, пропорциональной и дифференцирующей составляющих u(t);
Dун(t) - выходная переменная МДЗН;
Dу(t), ![]() - ошибка регулирования и скорость ее изменения;
- ошибка регулирования и скорость ее изменения;
![]() ,
, ![]() - соответственно скорость и ускорение изменения переменных Dунф(t) и Dупр(t);
- соответственно скорость и ускорение изменения переменных Dунф(t) и Dупр(t);
![]() ,
, ![]() - функции переключения yи;
- функции переключения yи;
kр, Тиз, Тпрд - настройки основного алгоритма РПС, соответственно коэффициент передачи, время изодрома, время предварения;
![]() ,
, ![]() , Dузи - настроечные параметры функций
, Dузи - настроечные параметры функций ![]() ,
, ![]() ;
;
![]() , kфр1, kфр2 - настроечные параметры фильтра низких частот регулятора, соответственно частота среза и коэффициенты, которые определяют тип фильтра (при kфр1 » 1,41, kфр2 » 1,00 ФР будет фильтром Баттеворта, при kфр1 » 2,37, kфр2 » 3,31 – фильтром Чебышева с уровнем максимума пульсаций в полосе заграждения 1,1 %).
, kфр1, kфр2 - настроечные параметры фильтра низких частот регулятора, соответственно частота среза и коэффициенты, которые определяют тип фильтра (при kфр1 » 1,41, kфр2 » 1,00 ФР будет фильтром Баттеворта, при kфр1 » 2,37, kфр2 » 3,31 – фильтром Чебышева с уровнем максимума пульсаций в полосе заграждения 1,1 %).
4. Модуль прогнозирования движения ОУ под воздействием управления (МПР):
 (4)
(4)
где Dупр(t) - прогнозируемое значение приращения Dy(t) под действием u(t) на время запаздывания вперед;
gпр(t) - функция переключения ПР;
kпр, Тпр1, Тпр2 - настроечные параметры алгоритма прогнозирования.
5. Модуль формирования управляющих воздействий (МФУВ):
 (5)
(5)
где u(t), ![]() - управляющее воздействие РПС и скорость его изменения;
- управляющее воздействие РПС и скорость его изменения;
umax, umin - ограничения на изменения u(t);
![]() ,
, ![]() - функции переключения yУ;
- функции переключения yУ;
Tу - постоянная времени интегратора МФУВ;
t - текущее время, отсчет которого начинается в момент замыкания САР.
Характеристики y-ячеек представлен на рис. 2. В том случае, если все y-ячейки реализуют свои a-структуры, то РПС вырождается в обычный линейный ПИД-регулятор.
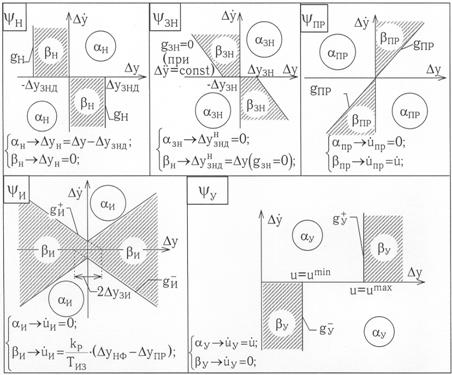
Рис. 2 Характеристики y-ячеек базового РПС
Как и для типовых линейных регуляторов, для рассматриваемого РПС- регулятора, разработаны упрощенные методики настройки параметров САР простейшей структуры, не требующие применения оптимизационных процедур. Для их применения свойства объекта управления по каналу регулирования традиционно представляются в виде модели первого порядка с запаздыванием (параметры k0, t0, Т0). Отличие методики состоит в том, что она предлагает более обоснованный выбор трех вариантов критериев САР, которым будут соответствовать настройки. Это критерии минимумов интегральных квадратичных ошибок регулирования при воздействиях на систему по каналам возмущения и запаздывания: min jf и min jy (соответственно для вариантов, когда САР преимущественно работает в режимах стабилизации и слежения), и критерий минимума средней интенсивности (частоты) нарушения регулируемой переменной установленного регламентом ограничения: min ns. Настройки, соответствующие последнему критерию ориентированы, прежде всего, на применение РПС в составе систем гарантирующего управления [7]. Номограммы и формулы для расчета параметров приведены на рис. 3.
Реализация РПС предполагает цифровой вариант. Он, с одной стороны, резко упрощает реализацию, по сравнению с аналоговым, но приводит к появлению дополнительной проблемы. Она связана с устойчивостью реализуемой РПС вычислительной процедуры. Прямое программирование алгоритма регулирования по блокам (модулям) структурной схемы регулятора (рис. 1) недопустимо из-за наличия в нем внутреннего контура прогнозирующей обратной связи. Цифровая реализация приведет к появлению в контуре дополнительного запаздывания (опережения) на шаг квантования Ткв относительно прямой цепи. А это при определенных соотношениях настроечных параметров элементов, входящих в этот контур, может привести к его неустойчивости.
Во избежание этого модули алгоритмический, прогнозирования и фильтрации описываются как единый модуль. Его передаточная функция при фиксированных структурах имеет вид:
![]() , (6)
, (6)
где ![]()
![]()
![]()
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() .
.
Важно, что порядок числителя ![]() не превышает порядка знаменателя. После перехода к дискретному времени (t ® nTкв,
не превышает порядка знаменателя. После перехода к дискретному времени (t ® nTкв, ![]() ), получаем:
), получаем:

![]() (7)
(7)
![]() ,
,
где ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
;  ;
;
![]() ;
; ![]() ;
; ![]() .
.
Выражение для расчета ошибки регулирования Dу при инерционном задатчике имеет вид:
![]() . (8)
. (8)
Для реализации управляющего воздействия, подаваемого на пропорциональный ИМ, необходимо дополнительно выполнить операцию интегрирования:
![]() . (9)
. (9)
Исследования показали, что САР с таким регулятором имеет существенно лучшие показатели эффективности, чем с ПИД-регулятором. Особенно это проявляется для существенно нестационарных объектов управления.
При необходимости рассмотренный алгоритм регулирования может быть расширен, например, за счет реализации второго порядка астатизма.
The regulator of variable structure with forecasting the free movement, oriented on application in systems of automatic control by objects of technological type is considered. The regulator provides essential increase of efficiency SAR, in particular for appreciably non-stationary objects. The questions of its digital realization and quasioptimal adjustments are worked. The regulator is positioned as alternative to typical PID-regulators.
1. Наладка средств автоматизации и автоматических систем регулирования: Справочное пособие / А.С. Клюев, А.Т. Лебедев, С.А. Клюев, А.Г. Товарнов; Под ред. А.С. Клюева. – 2-е изд., перераб. и доп. – М.: Энергоатомиздат, 1989. – 368 с.: ил.
2. Ялышев А.У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1981. – 399 с.: ил.
3. Хобін В.А., Парамонов О.І. Регулятор змінної структури для побутових ефективних робастних автоматичних систем // В кн.: Наук. пр. / Одес. держ. акад. харч. техн. – Одеса, 1997. – Вип. 17. – С. 241 – 248.
4. Справочник по теории автоматического управления / Под ред. А.А. Красовского. – М.: Наука, 1987. – 712 с.
5. Системы с переменной структурой и их применение в задачах автоматизации полета / Под ред. Б.Н. Петрова и С.В. Емельянова. – М.: Наука, 1968. – 324 с.
6. Системное проектирование средств автоматизации / С.В. Емельянов, Н.Е. Костылева, Б.П. Матич, Н.Н. Миловидов. – М.: Машиностроение, 1978. – 190 с.
7. Хобин В.А. Системы гарантирующего управления: структуры с расчетом уставок контурам регулирования // Пр. Міжнар. конф. з автомат. управління (Львів. – 11 – 15 вересня 2000). – Т. 1 – Математичні проблеми управління, оптимізації та теорії ігор. – Львів, ДНДІ інформаційної інфраструктури, 2000. – С. 269 – 273.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Современные технические средства, комплексы и системы
Краснов В.А., Прохорович А.В., Шутов С.В., Деменский А.Н. Анализ флуктуаций размера растущего кристалла (на примере легированных монокристаллов кремния, вытягиваемых из расплава по методу Чохральского)Завальнюк И.П. Управление высокопроизводительной экструзией неоднородных материалов
Долина В.Г., Писаренко А.В. Синтез складної багатовимірної системи управління випарною станцією на основі рефрактометричних вимірювань
Стопакевич А.А., Тодорцев Ю.К. Анализ современного состояния систем управления брагоректификационными установками спиртового производства
Поливода В.В. Современные компьютерные технологии в АСУ на хлебоприёмном предприятии
Ладанюк А.П., Українець А.І., Кишенько В.Д. Управління автоматизованими технологічними комплексами харчових виробництв на основі сценарного підходу
Ковриго Ю.М., Фоменко Б.В. Врахування обмежень для підвищення якості функціонування систем регулювання енергоблоків ТЕС і АЕС
Евдокимов А.В., Китаев А.В., Агбомассу В.Л. Исследование причин, определяющих вращение рамки с током в магнитном поле после воздействия на нее внешнего импульса
Аппазов Э.С. Применение твердых растворов InGaN в фотовольтаике
Кузнєцов Ю.М., Дмитрієв Д.О. Програмно математичний апарат керування виконавчим органом багатокоординатних верстатів нових компоновок
Черевко О.И., Ефремов Ю.И., Одарченко А.М., Одарченко Д.М, Агафонова Ю.Ю. Теоретическое обоснование перспективного биконического резонатора для СВЧ-устройств при переработке растительного сырья
Хобин В.А. Бабиков А.Ю. Системы экстремального управления молотковыми дробилками с функцией гарантированного соблюдения тепловых режимов их электродвигателей.
Стадниченко В.Н. Исследование влияния изменения эксплуатационных нагрузок на свойства металлокерамических слоёв полученных с использованием трибовосстанавливающих составов
Ісаєв Е.А., Наговський Д.А., Чернецька І.Е. До вибору факторів, що характеризують окомкування тонкоподрібнених залізорудних матеріалів
Федоровский К.Ю., Лунев А.А. Теплоотдача погружного пластинчатого теплообменника системы охлаждения энергоустановок морских технических средств
Федоровский К.Ю., Владецкий Д.О. Интенсификация теплоотвода замкнутых систем охлаждения энергоустановок морских технических средств.
Пономарьов Я.Ю., Ладанюк А.П., Іващук В.В. Досвід використання нечітких регуляторів в системі атоматизації випарної установки.
Левченко А.А., Кравчук О.И. Эквивалентный макромодуль процесса технического обслуживания радиотехнических средств.
Іволгіна Т.О. Енергетичний підхід до аналізу стійкості руху вимірювальної головки координатно-вимірювальної машини
Ладанюк А.П., Кишенько В.Д., Ладанюк О.А. Системна задача управління біотехнологічними процесами.
Тернова Т.І. Алгоритм оцінювання деформацій рапорту періодичних об'єктів
Рожков С.А., Федотова О.Н. Алгоритм обучения системы распознавания автоматической системы разбраковки тканей
Пупена О.М, Ельперін І.В, Ладанюк А.П. Особливості проектування комп’ютерно-інтегрованих систем управління
Квасніков В.П., Кочеткова О.В. Проектування координатно–вимірювальної машини на нейронних мережах
Водічев В.А., Мухаммед М.А. Дослідження системи стабілізації потужності різання металообробного верстата з фази-регулятором
Шутов С.В., Аппазов Э.С., Марончук А.И., Самойлов Н.А. Методика испытания термофотовольтаических преобразователей
Хобин В.А. Повышение качества формирования смесей средствами интеллектуализации алгоритмов управления порционным дозированием
Терновая Т.И. Автоматическая система разбраковки тканей с печатным рисунком методом компенсации информационных потоков
Рожков С.А., Бражник Д.А. Использование нейросетевых структур для построения систем распознавания образов
Місюра М.Д., Кишенько В.Д. Математичні моделі технологічних процесів пивоварного виробництва як об’єктів автоматизації
Ладанюк А.П., Власенко Л.О. Автоматизоване управління бізнес-процесами в комп’ютерно-інтегрованих структурах підприємства
Жукова Н.В., Литвинов В.І. Вирішення проблеми погодженого руху валків з неоднаковими катаючими діаметрами профілезгинальних станів
Денисова А.Е., Тодорцев Ю.К., Максименко И.Н. К вопросу об автоматизации интегрированной установки теплоснабжения с возобновляемыми источниками энергии
Бессараб В.И. Компьютеризированная система управления водоотливным хозяйством угольных шахт по критерию минимума энергозатрат
Тонконогий В.М. Трехконтурная АСУ нанесением ионно-плазменного покрытия на режущий инструмент.
Колесникова Е.В., Кострова Г.В. Формирование базы данных АСУТП дуговой сталеплавильной печи.
Водічев В.А. Автоматизована система керування швидкостями робочих рухів то-карного верстата для підвищення ефективності обробки торцевих поверхонь.
Бергер Е.Г., Дмитрієв Д.О., Бергер Є.Е., Діневич Г.Ю. Синтез строфоїдографів за методом параметричних сімей.
Бабак В.П., В.Н. Стадніченко, О.Г. Приймаков Прогнозування надійності, дов-говічності та витривалості авіаційних матеріалів
Бабак В.П., Стадниченко В.Н., Приймаков О.Г., Токарчук В.В. Прогнозування витривалості авіаційних матеріалів .
Куцак Р.С. Використання методу координатного еталону в задачах автоматизації контролю якості тканини.
Попруга А.Г. Усовершенствование электрических нагревателей по критерию экономии энергии.
Пашковский А.А., Далечин А.Ю. Система регистрации спектров фотолюминес-ценции
Никольский В.В., Цюпко Ю.М. Применение пьезоэлектрических датчиков в сис-теме кондиционирования воздуха судовых систем микроклимата.
Крапивко Г.И., Хлопёнова И.А. Повышение коэффициента полезного действия кремниевых фотоэлектронных преобразователей методом лазерной гравировки.
Кихтенко Д.А. Управление шаговыми двигателями в микрошаговом режиме, оп-тимизация управления.
Горохов В.А. Автоматизированная транспортно-складская система в текстильной и легкой промышленности.
Водічев В.А. Система стабілізації потужності різання фрезерного верстата з взаємозв'язаним керуванням швидкостями робочих рухів.
Шутов С.В., Аппазов Э.С., Марончук А.И. Испытание фотоэлектрических преобразователей в условиях экстремальных температурных колебаний.
Худяев А.А. К проблеме повышения точности воспроизведенияв классе многоканальных воспроизводящих систем с эталонной настройкой каналов.
Тверезовський В.С., Бараненко Р.В. Принцип побудови елементів вимірювальних систем, представлених цифровими програмно керованими давачами.
Никольский В.В., Сандлер А.К. Моделирование процессов в вискозиметре с пьезоэлектрическим приводом.
Марончук И.Е., Андронова Е.В., Баганов Е.А., Курак В.В. Использование метода импульсного охлаждения насыщенного раствора-расплава для формирования наноразмерных структур InSb в матрице GaSb.
Водічев В.А. Аналого-цифровий регулятор режиму металообробки для верстатів з числовим програмним керуванням.
Блинов Э.И., Кравцов В.И., Кравцов А.В., Недбайло А.Н. Управление гибкими протяженными объектами направленными силовыми воздействиями.