УДК 681-1
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
В МИКРОШАГОВОМ РЕЖИМЕ, ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
Кихтенко Д.А.
Шаговые двигатели уже давно и успешно применяются в самых разнообразных устройствах. Их можно встретить в дисководах, принтерах, плоттерах, сканерах, факсах, а также в разнообразном промышленном и специальном оборудовании. В настоящее время выпускается множество различных типов шаговых двигателей способных удовлетворить любые запросы.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика связи. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка [1].
Так как при работе шагового двигателя без обратной связи возможна потеря контроля положения (потеря шагов), на практике при осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия. Избавится от этих явлений можно путем использования обратной связи и микрошагового режима. На рис.1 показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Рис.1 Перемещения ротора в полношаговом и микрошаговом режимах.
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно - или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Микрошаговые режимы бывают от 1/3 полного шага до 1/32 и даже меньше, наиболее часто используют 1/4, 1/8, 1/16, 1/32 [1,4].
Рис.2. Зависимость момента от угла поворота ротора в случае
разных значений тока фаз.
Чтобы получить нужное направление магнитного поля, необходимо выбрать правильное направление токов в катушках и правильное соотношение этих токов (рис. 2), результирующий момент будет
Th=(a2+b2)0.5, (1)
а точка равновесия ротора сместится в точку
x=(S/(pi/2))arctan(b/a) (2)
где a и b – момент, создаваемый первой и второй фазой
соответственно,
Th – результирующий момент удержания,
x – положение равновесия ротора в радианах,
S – угол шага в радианах.
Данные формулы верны только в том случае, если зависимость момента от угла поворота ротора синусоидальная и если ни одна часть магнитной цепи двигателя не насыщается.
Точка равновесия смещается, следовательно, ротор можно зафиксировать в любой произвольной позиции. Для этого необходимо соответственно установить отношение токов в фазах, таким образом, происходит реализация микрошагового режима.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах [1,4].
Современные микроконтроллеры, которые имеют встроенные ЦАП, можно использовать для реализации микрошагового режима вместо специальных контроллеров. Это позволяет сделать практически одинаковой стоимость оборудования для полношагового и микрошагового режимов.
Рис. 3. Схема ШИМ и формы кривых напряжения:
1 - нагрузка; 2 - токоизмерительный резистор; 3 - диод обратного тока
Управление с помощью широтно-импульсной модуляции. Коммутатор с широтно-импульсной модуляцией (ШИМ) обеспечивает стабилизацию тока с незначительными потерями. Основная функция ШИМ коммутатора представлена на рис. 3 [1].
Рис. 4. Схема коммутатора типа ШИМ:
1 - циркуляционный ток после запирания VT1; 2 - датчик тока; 3 - ток после запирания VT4
Здесь индуктивная нагрузка, помещенная в пунктирный прямоугольник, представляет собой обычный коммутатор (рис. 4). Напряжение на датчике тока нагрузки сравнивается с эталонным, с помощью операционного усилителя с высоким коэффициентом усиления. Эталонное напряжение представляет собой сумму высокочастотной компоненты треугольной или синусоидальной формы и постоянной составляющей, с которой необходимо сравнить напряжение датчика.
Рис. 5 Прямоугольная форма напряжения и форма кривой тока
Если постоянная компонента эталонного сигнала и напряжение датчика близки, то выходной сигнал усилителя будет иметь прямоугольную форму, как показано для V0 на рис. 5[1].
Преимущества ШИМ или вибрационного управления заключается в единственном источнике питания, малых потерях мощности и автоматическом регулировании напряжения для управления при нормированном токе.
Для работы в прецизионных системах, где важным фактором является точность позиционирования целесообразно использовать гибридные шаговые двигатели. Наиболее распространенным гибридным шаговым двигателем является четырехфазный 200 – шаговый двигатель с углом шага 1.8° [1,4].
Рис. 6 Зависимости частоты вращения от положения:
а - удовлетворительная; б - неудовлетворительная; 1 - конечное положение
Задачи микроконтроллера. На рис. 6 показаны две зависимости частоты вращения от угла, построенные при управлении ШД с обратной связью. На рис. 6 а показан пример, в котором ШД запускается с требуемым углом коммутации, ускоряется при другом его значении и начинает торможение в момент, с которого частота вращения быстро уменьшается и становится равной нулю как раз в требуемом положении. Для запуска и ускорения использовали угол коммутации более 1 шага, а для торможения нулевой или отрицательный. На рис. 6 б представлен неудачный пример управления. Торможение начинается тогда, когда обнаружено конечное положение. Но двигатель не может остановится моментально и будет вращаться по инерции. Для приведения ротора в нужное положение он должен вращаться в обратном направлении с установлением соответствующего угла коммутации. Зависимость частоты вращения от углового положения ротора может быть колебательной, как показано на рис. 6 б [1,4].
Рис. 7 Система управления с логическим блоком, вынесенным за микроконтроллер:
1 - микропроцессор; 2- команды управления; 3 - Программа обучения и выполнения; 4 - монитор; 5 - коммутатор и логический блок; 6 - датчик положения ротора; 7 - шаговый двигатель; 8 - нагрузка
Микроконтроллерная система здесь используется для определения наилучшего времени изменения углов коммутации. На рис. 7 показана схема системы, в которой логический блок вынесен за микроконтроллер. Сигнал позиционирования поступает в блок формирования сигнала, который управляет движением ротора и обменивается информацией с микроконтроллером. Сигнал позиционирования поступает в блок формирования сигнала, который управляет движением ротора и обменивается информацией с микроконтроллером. Математическое обеспечение должно быть организовано так, чтобы микроконтроллер определял лучшее время для изменения углов коммутации, основываясь на предыдущем опыте и текущих данных о положении и частоте вращения. Микроконтроллер, в конечном счете, после нескольких итераций будет находить оптимальное время изменения угла коммутаций [1,2].
Наиболее характерным качеством микроконтроллера является гибкость программирования. Преимущества микроконтроллера состоит также в том, что он позволяет осуществлять генерацию временных импульсов, управление логической последовательностью и выполнения функций входного контроллера. Более сложные способы регулирования частоты вращения могут быть реализованы при помощи программ для микроконтроллера [2,3].
При оптимизации работы в микрошаговом режиме системы управления можно использовать микроконтроллеры семейства PIC, ATMEL или другие с встроенным ЦАП.
Рис. 8 Процесс ШИМ – стабилизации тока
Управление шаговым двигателем осуществляется на основе широтно-импульсной модуляции, при помощи которой ЦАП формирует синусоидальное опорное напряжение, которое подается на схему управления, выполненную на полевых транзисторах, где сигналы усиливаются и подаются на обмотки двигателя. Рисунок 8 [1,4].
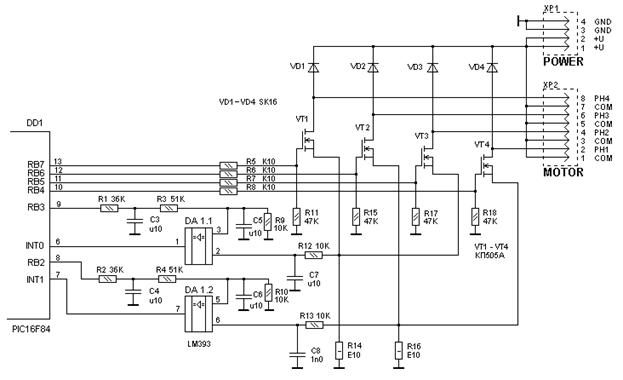
Рис. 9 Принципиальная схема контроллера
Выполнение шагов контролируется при помощи обратной связи, которая реализована на датчиках тока и компараторах. Датчики токов включаются в цепь истоков полевых транзисторов. Сигналы, снятые с датчиков тока, поступают на входы компараторов, на вторые входы компараторов подается опорное напряжение, сформированное микроконтроллером которое и определяет пиковый ток в обмотках шагового двигателя. Выходы компараторов подключаются к входам прерываний микроконтроллера. Рисунок 9 [2,3].
Основой устройства является микроконтроллер DD1. Сигналы управления обмотками двигателя формируются на портах РВ4 – РВ7. Для коммутации обмоток используются полевые транзисторы типа КП 505А (VT1 – VT4), чтобы транзисторы оставались закрытыми во время действия сигнала « сброс » микроконтроллера (порты в это время находятся в высокоимпедансном состоянии), между затворами и истоками включены резисторы R11, R14, R17, R18. Для ограничения тока перезарядки емкости затворов установлены резисторы R3, R6, R7, R8. В данном контроллере реализован медленный спад тока фаз, который обеспечивается шунтированием обмоток двигателя диодами VD1 – VD4. Для подключения шагового двигателя имеется восьмиконтактный разъем ХР1, который позволяет подключить двигатель, имеющий два отдельных вывода от каждой обмотки [1,4].
Стабилизация тока осуществляется с помощью ШИМ, которая реализована программно. Для этого используются два датчика тока R15 и R16. Сигналы, снятые с датчиков тока, через ФНЧ R12 C5 и R13 C6 поступают на входы компараторов DA1.1 и DA1.2. ФНЧ предотвращают ложные срабатывания компараторов вследствии действия помех. На второй вход каждого компаратора подается опорное напряжение, которое и определяет пиковый ток в обмотках двигателя. Это напряжение формируется микроконтроллером. Для фильтрации сигнала ШИМ используются двухзвенные ФНЧ R1C1R4C3 и R2C2R5C4. Одновременно резисторы R1, R4, R9 и R2, R5, R10 образуют делители, которые задают масштаб регулировки токов фаз. Выходы компараторов подключены к выходам прерываний микроконтроллера INT 0 и INT 1. Алгоритм работы показан на рисунке 10. Основываясь на схеме стабилизации тока, программно реализована система контроля выполнения шагов, алгоритм подпрограммы изображен на рис. 11.
Подпрограмма выполняется непосредственно после проверки позиции, а также при переходе в микрошаговый режим. Таким образом, при проверке позиции происходит проверка всей системы в целом, в том числе и шагового двигателя. При переходе в микрошаговый режим производится контроль микрошагов, наличие потерянных шагов, при потере шага напряжение на входе компаратора не соответствует эталонному и подпрограмма дает команду на повтор шага. Если выполнение микрошага произошло в соответствии с программой, то выполняется следующий шаг, если второй раз произошла потеря шага то выдается команда STOP. В полношаговом и полушаговом режимах подпрограмма не используется.
Данная методика предлагает вариант решения проблемы потери шагов при работе микроконтроллерной системы на шаговых двигателях без использования дорогостоящих датчиков положения.
|
Рис. 11 Алгоритм подпрограммы контроля выполнения шагов
It was offered the variant of realization of decision of problem of loss of steps when functioning (working) an microcontroller of system on crossbar engines without use the sensors of position, with the help of additional checking the steps in microsteps mode.
1. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. - М.: Энергоатомиздат, 1987. -200с.
2. Микроконтроллеры. Выпуск 2. Однокристальные микроконтроллеры PIC12C5x, PIC12C6x, PIC16x8x, PIC1400, M16C/61/62. Перевод с англ. Б. Я. Прокопенко/Под ред. Б. Я. Прокопенко. - М.: ДОДЕКА. 2000. -336с.
3. On-line session on http://www.microchip.ru
4. On-line session on http://www.telesys.ru
Ответы на вопросы [_Задать вопроос_]
Читайте также
Современные технические средства, комплексы и системы
Краснов В.А., Прохорович А.В., Шутов С.В., Деменский А.Н. Анализ флуктуаций размера растущего кристалла (на примере легированных монокристаллов кремния, вытягиваемых из расплава по методу Чохральского)Завальнюк И.П. Управление высокопроизводительной экструзией неоднородных материалов
Долина В.Г., Писаренко А.В. Синтез складної багатовимірної системи управління випарною станцією на основі рефрактометричних вимірювань
Стопакевич А.А., Тодорцев Ю.К. Анализ современного состояния систем управления брагоректификационными установками спиртового производства
Поливода В.В. Современные компьютерные технологии в АСУ на хлебоприёмном предприятии
Ладанюк А.П., Українець А.І., Кишенько В.Д. Управління автоматизованими технологічними комплексами харчових виробництв на основі сценарного підходу
Ковриго Ю.М., Фоменко Б.В. Врахування обмежень для підвищення якості функціонування систем регулювання енергоблоків ТЕС і АЕС
Евдокимов А.В., Китаев А.В., Агбомассу В.Л. Исследование причин, определяющих вращение рамки с током в магнитном поле после воздействия на нее внешнего импульса
Аппазов Э.С. Применение твердых растворов InGaN в фотовольтаике
Кузнєцов Ю.М., Дмитрієв Д.О. Програмно математичний апарат керування виконавчим органом багатокоординатних верстатів нових компоновок
Черевко О.И., Ефремов Ю.И., Одарченко А.М., Одарченко Д.М, Агафонова Ю.Ю. Теоретическое обоснование перспективного биконического резонатора для СВЧ-устройств при переработке растительного сырья
Хобин В.А. Бабиков А.Ю. Системы экстремального управления молотковыми дробилками с функцией гарантированного соблюдения тепловых режимов их электродвигателей.
Стадниченко В.Н. Исследование влияния изменения эксплуатационных нагрузок на свойства металлокерамических слоёв полученных с использованием трибовосстанавливающих составов
Ісаєв Е.А., Наговський Д.А., Чернецька І.Е. До вибору факторів, що характеризують окомкування тонкоподрібнених залізорудних матеріалів
Федоровский К.Ю., Лунев А.А. Теплоотдача погружного пластинчатого теплообменника системы охлаждения энергоустановок морских технических средств
Федоровский К.Ю., Владецкий Д.О. Интенсификация теплоотвода замкнутых систем охлаждения энергоустановок морских технических средств.
Пономарьов Я.Ю., Ладанюк А.П., Іващук В.В. Досвід використання нечітких регуляторів в системі атоматизації випарної установки.
Левченко А.А., Кравчук О.И. Эквивалентный макромодуль процесса технического обслуживания радиотехнических средств.
Іволгіна Т.О. Енергетичний підхід до аналізу стійкості руху вимірювальної головки координатно-вимірювальної машини
Ладанюк А.П., Кишенько В.Д., Ладанюк О.А. Системна задача управління біотехнологічними процесами.
Тернова Т.І. Алгоритм оцінювання деформацій рапорту періодичних об'єктів
Рожков С.А., Федотова О.Н. Алгоритм обучения системы распознавания автоматической системы разбраковки тканей
Пупена О.М, Ельперін І.В, Ладанюк А.П. Особливості проектування комп’ютерно-інтегрованих систем управління
Квасніков В.П., Кочеткова О.В. Проектування координатно–вимірювальної машини на нейронних мережах
Водічев В.А., Мухаммед М.А. Дослідження системи стабілізації потужності різання металообробного верстата з фази-регулятором
Шутов С.В., Аппазов Э.С., Марончук А.И., Самойлов Н.А. Методика испытания термофотовольтаических преобразователей
Хобин В.А. Повышение качества формирования смесей средствами интеллектуализации алгоритмов управления порционным дозированием
Терновая Т.И. Автоматическая система разбраковки тканей с печатным рисунком методом компенсации информационных потоков
Рожков С.А., Бражник Д.А. Использование нейросетевых структур для построения систем распознавания образов
Місюра М.Д., Кишенько В.Д. Математичні моделі технологічних процесів пивоварного виробництва як об’єктів автоматизації
Ладанюк А.П., Власенко Л.О. Автоматизоване управління бізнес-процесами в комп’ютерно-інтегрованих структурах підприємства
Жукова Н.В., Литвинов В.І. Вирішення проблеми погодженого руху валків з неоднаковими катаючими діаметрами профілезгинальних станів
Денисова А.Е., Тодорцев Ю.К., Максименко И.Н. К вопросу об автоматизации интегрированной установки теплоснабжения с возобновляемыми источниками энергии
Бессараб В.И. Компьютеризированная система управления водоотливным хозяйством угольных шахт по критерию минимума энергозатрат
Хобин В.А. Регулятор переменной структуры для объектов технологического типа
Тонконогий В.М. Трехконтурная АСУ нанесением ионно-плазменного покрытия на режущий инструмент.
Колесникова Е.В., Кострова Г.В. Формирование базы данных АСУТП дуговой сталеплавильной печи.
Водічев В.А. Автоматизована система керування швидкостями робочих рухів то-карного верстата для підвищення ефективності обробки торцевих поверхонь.
Бергер Е.Г., Дмитрієв Д.О., Бергер Є.Е., Діневич Г.Ю. Синтез строфоїдографів за методом параметричних сімей.
Бабак В.П., В.Н. Стадніченко, О.Г. Приймаков Прогнозування надійності, дов-говічності та витривалості авіаційних матеріалів
Бабак В.П., Стадниченко В.Н., Приймаков О.Г., Токарчук В.В. Прогнозування витривалості авіаційних матеріалів .
Куцак Р.С. Використання методу координатного еталону в задачах автоматизації контролю якості тканини.
Попруга А.Г. Усовершенствование электрических нагревателей по критерию экономии энергии.
Пашковский А.А., Далечин А.Ю. Система регистрации спектров фотолюминес-ценции
Никольский В.В., Цюпко Ю.М. Применение пьезоэлектрических датчиков в сис-теме кондиционирования воздуха судовых систем микроклимата.
Крапивко Г.И., Хлопёнова И.А. Повышение коэффициента полезного действия кремниевых фотоэлектронных преобразователей методом лазерной гравировки.
Горохов В.А. Автоматизированная транспортно-складская система в текстильной и легкой промышленности.
Водічев В.А. Система стабілізації потужності різання фрезерного верстата з взаємозв'язаним керуванням швидкостями робочих рухів.
Шутов С.В., Аппазов Э.С., Марончук А.И. Испытание фотоэлектрических преобразователей в условиях экстремальных температурных колебаний.
Худяев А.А. К проблеме повышения точности воспроизведенияв классе многоканальных воспроизводящих систем с эталонной настройкой каналов.
Тверезовський В.С., Бараненко Р.В. Принцип побудови елементів вимірювальних систем, представлених цифровими програмно керованими давачами.
Никольский В.В., Сандлер А.К. Моделирование процессов в вискозиметре с пьезоэлектрическим приводом.
Марончук И.Е., Андронова Е.В., Баганов Е.А., Курак В.В. Использование метода импульсного охлаждения насыщенного раствора-расплава для формирования наноразмерных структур InSb в матрице GaSb.
Водічев В.А. Аналого-цифровий регулятор режиму металообробки для верстатів з числовим програмним керуванням.
Блинов Э.И., Кравцов В.И., Кравцов А.В., Недбайло А.Н. Управление гибкими протяженными объектами направленными силовыми воздействиями.