УДК 004.93
ИСПОЛЬЗОВАНИЕ НЕЙРОСЕТЕВЫХ СТРУКТУР ДЛЯ ПОСТРОЕНИЯ СИСТЕМ РАСПОЗНАВАНИЯ ОБРАЗОВ
Рожков С.А., Бражник Д.А.
Постановка проблемы
При автоматизации контроля качества текстильных производств существует проблема создания таких систем контроля, которые могли бы обнаруживать и распознавать сложные дефекты тканей с малыми уровнями соотношения сигнал-шум. При этом создание систем автоматической разбраковки тканей применительно к телевизионным методам съема информации и широкое внедрение этих систем сдерживается целым рядом факторов: необходимостью разработки специальных методов и средств обнаружения сигналов дефектов, обладающих малым отношением сигнал-шум; значительными потоками информации в системах обработки сигналов; отсутствие приемников излучения фотоэлектрического типа с необходимыми кривыми спектральной чувствительности; высокой стоимостью известных систем контроля качества.
Анализ последних исследований
Особенность построения современных систем распознавания образов заключается в том, что они строятся как системы преобразования информации. Это определяет их чувствительность к условиям предъявления входных образов. С другой стороны, инвариантность к возмущениям обеспечивают системы, которые построены с использованием обратных связей – системы по отклонению [1]. При этом в задаче контроля следует учитывать и специфику объекта контроля – ткань, что требует применения методов оптимальной фильтрации. Такой подход к решению задачи обеспечивает значительное увеличение отношения сигнал-шум для дефектов основных нитей ткани и дефектов, связанных с изменением окраски тканей, загрязнениями.
Современные методы анализа состояния объектов контроля базируются на использовании оптимальных процедур построения оценок состояния, а именно:
- сглаживание, где, как правило, применяют нерекуррентные методы;
- фильтрация, где при синтезе систем управления наиболее часто используются рекуррентные методы;
- прогноз используются там, где нужна экстраполяция измерительной информации.
В общем случае оценивание является задачей восстановления состояния системы по информации о ее входах и выходах, причем задача будет разрешима только в случае, когда между данными вход-выход и состояниями можно установить однозначное соответствие.
Процедура поиска оптимальной, в смысле минимальной среднеквадратической ошибки, структуры фильтра для стационарной задачи в одномерном случае строится с использованием целевого функционала:
|
|
|
где: ![]() - аддитивная смесь сигнала
- аддитивная смесь сигнала ![]() и шума
и шума ![]() ,
,
![]() - импульсная весовая функция системы
распознавания,
- импульсная весовая функция системы
распознавания, ![]() - математическое ожидание
ошибки,
- математическое ожидание
ошибки, ![]() - сигнал без шумов.
- сигнал без шумов.
При
этом задача ![]() имеет решение, определяемое
интегральным уравнением Винера-Хопфа [2]:
имеет решение, определяемое
интегральным уравнением Винера-Хопфа [2]:
|
|
|
где: ![]() - взаимно корреляционная функция
искомого сигнала и сигнала с шумом,
- взаимно корреляционная функция
искомого сигнала и сигнала с шумом, ![]() -
автокорреляционная функция сигнала.
-
автокорреляционная функция сигнала.
Реализация методов распознавания изображений, основанных на быстром преобразовании Фурье (БПФ), не удовлетворяют требованиям, предъявляемым к современным системам распознавания, которые работают в реальном масштабе времени.
Предлагается система компенсации входных информационных потоков, с помощью которой возможно скомпенсировать входное воздействие за счет генерации эталонных сигналов.
Система компенсации входных потоков информации
Система предназначена для распознавания сложных образов, фильтрации сигналов дефектов тканей в автоматической системе разбраковки тканей с разнооттеночностью и с выделением признаков классов дефектов. Задача ориентирована на создание системы автоматической разбраковки тканей со сложным рисунком.
Если рассматривать потоки информации образа Jo и эталона Jэ как встречные с мерой отклонения Je, где Je = Je(x,u,Wi,t) - условная информация Joэ, то возможна постановка задачи оптимального управления для эталона Wi: x*,u*® min Je решение которой позволяет решить задачу распознавания в классе образов W: Wi ® inf Je.
На рис. 1 показана структурная схема системы, полученная при таком подходе.
|
|
|
Рис.1 Структурная схема системы оптимальной фильтрации |
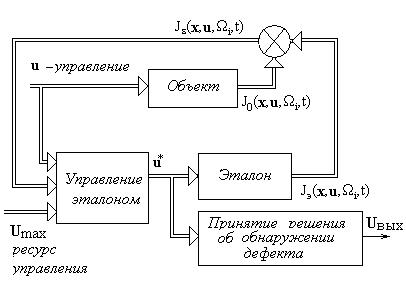
В качестве отклонения выходного сигнала объекта от сигнала модели выступает Je - условная информация связи между потоком Jо и потоком Jэ.
Используя идею метода допустимых преобразований [3], определим удобный для наблюдения параметр, однозначно связанный с Je и следуя рекомендациям [2], рассмотрим корреляционную меру близости между эталонным wi* и предъявленным образом wi. При этом апертурное ограничение [4], связанное с превышением геометрических размеров поля контроля над "окном" датчика, определяет введение активного сканирующего движения датчика в поле контроля.
Сигналы эталона f*(x) и объекта f(x) зависят от закона сканирующего движения в пространстве эталона как xэ=xэ(t) и закона сканирования в пространстве объекта xо=xо(t). Очевидно, при усреднении по реализациям, расстояние между эталоном и объектом следующим образом:
|
|
|

где: fо*(x), fо(x) - центрированные сигналы эталона и объекта, Sw - область чувствительности датчика, Dx - пространственный сдвиг между эталоном и изображением.
После усреднения по времени получим среднее значение отклонения объекта и эталона:
|
|
(1) |

Пространственный сдвиг Dx в области Sw для сигнала объекта определяет параллельное представление изображения объекта в окне Sw. При этом, при условии совпадения объекта и эталона f=f* существует Dx*, при котором:
|
|
(2) |

В данной задаче учитывается неопределенность совмещения в пределах Sw. Поэтому условие (2) переходит в условие DxÎSω, Dx=const. Это позволяет поставить двойственную задачу при ограничениях на управление эталоном Du*(t) ® Dx = const. Ограничение на управление Du*(t)ÎW определяется требованием связности окрестности образа, то есть, если деформации не превышают допустимых значений, то затраты на управление не должны превышать допустимого ресурса управления.
Таким образом, если задача оптимального управления (2) при ограничениях Dx=const и Du*(t)ÎW имеет решение, то образы, порождающие сигналы f и f*, будут близкими. При этом, чем меньше затраты на управление, тем ближе образы wi* и wi.
Это дает алгоритм решения задачи распознавания:
|
|
(3) |
Следовательно, выполнение условий затухания управления, постоянства координат корреляционного максимума Dx = const и условие совпадения эталона и объекта f = f* позволяют достигнуть supr*.
Использование нейронной сети в качестве чувствительного элемента системы
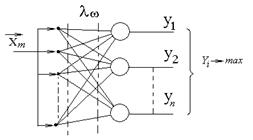
Однако наибольшую сложность при решении задачи вызывает реализация алгоритма определения положения корреляционного максимума. Для решения данной задачи необходимы параллельные вычисления большого числа корреляционных функций [5]. Наибольшую степень параллельности для данного процесса обеспечивает нейронная сеть, имеющая достаточно простую структуру (рис. 2).
|
|
|
Рис. 2 Однослойная нейронная сеть |
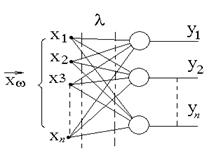
В общем случае для простой сети вектор входного сигнала преобразуется в вектор выхода умножением на матрицу весов, хранящую информацию о распознаваемых образах (4).
|
|
(4) |
Естественно, что размерность вектора входа значительно меньше
размерности памяти ![]() , где собственно строки
матрицы весов представляют собой набор эталонов распознаваемых образов.
, где собственно строки
матрицы весов представляют собой набор эталонов распознаваемых образов.
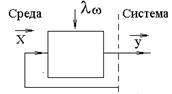
Таким образом, структурно работа сети представляет преобразование сигнала системой (рис. 3).
|
|
|
Рис. 3 Взаимодействие системы с внешней средой |

Данный подход предполагает высокую степень параллельности вычислений, что реально возможно только при аналоговой обработке сигнала. Однако процесс вычисления традиционно реализуется как последовательный и достоинства алгоритма исчезают.
С другой стороны, можно реализовать матрицу фотоприемников, обрабатывающую сигнал по такому же алгоритму, с той лишь разницей, что входной образ отражается матрицей весов (5)
|
|
(5) |
В этом случае входной вектор должен генерироваться как строка ожидаемого изображения, а реакция будет определяться по компонентам выходного вектора:
|
|
(6)
|

Структура сети в этом случае не изменяется, но входным сигналом являются значения весов (рис. 4).
|
|
|
Рис. 4 Сеть при входе по матрице весов |
Существенно то, что сеть выступает как элемент сравнения в замкнутой системе, где имеется сигнал из системы, а выходной вектор несет информацию о степени совпадения входного образа и эталона. Следовательно, взаимодействие системы с внешней средой представляет компенсацию внешнего потока информации от среды и внутреннего потока информации от эталона (рис.5).
|
|
|
Рис. 5 Взаимодействие системы с компенсацией информации |
Реализация матрицы входного образа должна допускать центрирование на скользящее среднее. Так же возможно центрирование и строки эталона.

В таком случае легко представить каждый из компонентов выходного вектора как оценку корреляции строки входного образа и эталона (7).
|
|
(7) |
Если во входном сигнале содержится строка, соответствующая ожидаемому
образу входного сигнала, то получим максимальное значение оценки корреляции
строки, что подтверждает гипотезу о соответствии входного образа эталону ![]() .
.
В данном случае необходимо введение подсистемы управления, которая обеспечивает стабилизацию положения выбираемых строк, как в горизонтальном направлении, так и вертикальном

где ![]()
![]() -
управление х и у.
-
управление х и у.
Введение ограничений на ресурс управлений обеспечивает сохранение связности точек входного образа и эталона.

Таким образом, при наличии подсистем стабилизации корреляционного максимума появляется возможность просто генерировать строки образа, являющегося гипотезой, и, если ресурс управления достаточен, можно утверждать о непротиворечивости входного образа и выдвинутой гипотезы.
В данном случае процесс распознавания разбивается на три этапа: выдвижение гипотезы с учетом контекста, генерация эталонного сигнала и стабилизация корреляционного максимума на фотоприемнике.
Существенным моментом в данном случае является тот факт, что данные процессы распараллелены. Действительно, после выдвижения гипотезы, генерация эталона идет самостоятельно до полного завершения или до момента потери управления по превышению допустимого ресурса управления для данного образа. Работа подсистемы стабилизации корреляционного максимума не требует анализа до момента завершения генерации эталона или до момента потери управления. Работа подсистемы выдвижения гипотезы не задействована до конца процедуры проверки. Но момент потери управления связан с генерацией эталона и для корректировки гипотезы предоставляются данные об области несоответствия эталона и объекта.
В случае, когда матрица фотоприемников не покрывает весь объект или
входной образ является только частью более сложного изображения ![]() можно ввести дополнительные сканирующие
движения как в пространстве входного образа, так и в пространстве эталона
можно ввести дополнительные сканирующие
движения как в пространстве входного образа, так и в пространстве эталона ![]()
При справедливости выдвинутой гипотезы управления сканирование
входного пространства и сканированием эталона различаются на управление
необходимое для устранения искажений входного образа ![]()
Как и в предыдущем случае необходимо ограничение ресурса управления,
для обеспечения проверки условия связности точек входного образа и эталона.
Если на всей траектории выполняется условие ![]() , то
между эталоном и образом нет нарушений связности и условия подтверждения
гипотезы принимают вид
, то
между эталоном и образом нет нарушений связности и условия подтверждения
гипотезы принимают вид

В случае сложного изображения необходима параллельная работа нескольких анализаторов. При этом генерация эталонов ведется одновременно по нескольким строкам, но условия связности и ограничение ресурсов остается единым для данного образа, а это значительно сокращается объем памяти, требуемый для вычислений.
Выводы
Развитие методов топологического анализа, корреляционных методов, методов эластичного эталона и алгоритмов нейронных сетей с использованием известных методов теории управления предполагает возможность создания систем распознавания оптических образов, инвариантных относительно возмущений в пространстве изображений.
Considered problem of recognition of optical images and scenes at uncertainties of conditions of presenting the input images and outraging in the space of original. In the base of work approved method to input information flow compensations. Main problem of method is concluded in realization of input converter information, allowing judge on the correspondence input signal standard. Shown that as a sensor in the system possible use neuron network with the input signal, modulating matrix of weights, herewith input vector is generated as a line of standard.
1. Храпливый А.П., Рожков С.А., Терновая Т.И., Бражник Д.А. Использование метода компенсации информационных потоков при создании систем автоматического распознавания. //Автоматика. Автоматизация. Электротехнические комплексы и системы. - 1998, №2. С.93-100.
2. Хорн Б.К.П. Зрение роботов : Пер. с анг. - М.: Мир, 1989. -487 с.
3. Дж. Ту, Р. Гонсалес. Принципы распознавания образов. Пер. с англ. И.Б.Гуревича, под ред. Ю.И.Журавлева - М.: Мир, 1978, -407 с.
4. Катыс Г.П. Восприятие и анализ оптической информации автоматической системой. – М.: Машиностроение, 1986.-416 с.
5. Основы теории искусственных нейронных сетей. – Харьков: Телетех, 2002. –317 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Современные технические средства, комплексы и системы
Краснов В.А., Прохорович А.В., Шутов С.В., Деменский А.Н. Анализ флуктуаций размера растущего кристалла (на примере легированных монокристаллов кремния, вытягиваемых из расплава по методу Чохральского)Завальнюк И.П. Управление высокопроизводительной экструзией неоднородных материалов
Долина В.Г., Писаренко А.В. Синтез складної багатовимірної системи управління випарною станцією на основі рефрактометричних вимірювань
Стопакевич А.А., Тодорцев Ю.К. Анализ современного состояния систем управления брагоректификационными установками спиртового производства
Поливода В.В. Современные компьютерные технологии в АСУ на хлебоприёмном предприятии
Ладанюк А.П., Українець А.І., Кишенько В.Д. Управління автоматизованими технологічними комплексами харчових виробництв на основі сценарного підходу
Ковриго Ю.М., Фоменко Б.В. Врахування обмежень для підвищення якості функціонування систем регулювання енергоблоків ТЕС і АЕС
Евдокимов А.В., Китаев А.В., Агбомассу В.Л. Исследование причин, определяющих вращение рамки с током в магнитном поле после воздействия на нее внешнего импульса
Аппазов Э.С. Применение твердых растворов InGaN в фотовольтаике
Кузнєцов Ю.М., Дмитрієв Д.О. Програмно математичний апарат керування виконавчим органом багатокоординатних верстатів нових компоновок
Черевко О.И., Ефремов Ю.И., Одарченко А.М., Одарченко Д.М, Агафонова Ю.Ю. Теоретическое обоснование перспективного биконического резонатора для СВЧ-устройств при переработке растительного сырья
Хобин В.А. Бабиков А.Ю. Системы экстремального управления молотковыми дробилками с функцией гарантированного соблюдения тепловых режимов их электродвигателей.
Стадниченко В.Н. Исследование влияния изменения эксплуатационных нагрузок на свойства металлокерамических слоёв полученных с использованием трибовосстанавливающих составов
Ісаєв Е.А., Наговський Д.А., Чернецька І.Е. До вибору факторів, що характеризують окомкування тонкоподрібнених залізорудних матеріалів
Федоровский К.Ю., Лунев А.А. Теплоотдача погружного пластинчатого теплообменника системы охлаждения энергоустановок морских технических средств
Федоровский К.Ю., Владецкий Д.О. Интенсификация теплоотвода замкнутых систем охлаждения энергоустановок морских технических средств.
Пономарьов Я.Ю., Ладанюк А.П., Іващук В.В. Досвід використання нечітких регуляторів в системі атоматизації випарної установки.
Левченко А.А., Кравчук О.И. Эквивалентный макромодуль процесса технического обслуживания радиотехнических средств.
Іволгіна Т.О. Енергетичний підхід до аналізу стійкості руху вимірювальної головки координатно-вимірювальної машини
Ладанюк А.П., Кишенько В.Д., Ладанюк О.А. Системна задача управління біотехнологічними процесами.
Тернова Т.І. Алгоритм оцінювання деформацій рапорту періодичних об'єктів
Рожков С.А., Федотова О.Н. Алгоритм обучения системы распознавания автоматической системы разбраковки тканей
Пупена О.М, Ельперін І.В, Ладанюк А.П. Особливості проектування комп’ютерно-інтегрованих систем управління
Квасніков В.П., Кочеткова О.В. Проектування координатно–вимірювальної машини на нейронних мережах
Водічев В.А., Мухаммед М.А. Дослідження системи стабілізації потужності різання металообробного верстата з фази-регулятором
Шутов С.В., Аппазов Э.С., Марончук А.И., Самойлов Н.А. Методика испытания термофотовольтаических преобразователей
Хобин В.А. Повышение качества формирования смесей средствами интеллектуализации алгоритмов управления порционным дозированием
Терновая Т.И. Автоматическая система разбраковки тканей с печатным рисунком методом компенсации информационных потоков
Місюра М.Д., Кишенько В.Д. Математичні моделі технологічних процесів пивоварного виробництва як об’єктів автоматизації
Ладанюк А.П., Власенко Л.О. Автоматизоване управління бізнес-процесами в комп’ютерно-інтегрованих структурах підприємства
Жукова Н.В., Литвинов В.І. Вирішення проблеми погодженого руху валків з неоднаковими катаючими діаметрами профілезгинальних станів
Денисова А.Е., Тодорцев Ю.К., Максименко И.Н. К вопросу об автоматизации интегрированной установки теплоснабжения с возобновляемыми источниками энергии
Бессараб В.И. Компьютеризированная система управления водоотливным хозяйством угольных шахт по критерию минимума энергозатрат
Хобин В.А. Регулятор переменной структуры для объектов технологического типа
Тонконогий В.М. Трехконтурная АСУ нанесением ионно-плазменного покрытия на режущий инструмент.
Колесникова Е.В., Кострова Г.В. Формирование базы данных АСУТП дуговой сталеплавильной печи.
Водічев В.А. Автоматизована система керування швидкостями робочих рухів то-карного верстата для підвищення ефективності обробки торцевих поверхонь.
Бергер Е.Г., Дмитрієв Д.О., Бергер Є.Е., Діневич Г.Ю. Синтез строфоїдографів за методом параметричних сімей.
Бабак В.П., В.Н. Стадніченко, О.Г. Приймаков Прогнозування надійності, дов-говічності та витривалості авіаційних матеріалів
Бабак В.П., Стадниченко В.Н., Приймаков О.Г., Токарчук В.В. Прогнозування витривалості авіаційних матеріалів .
Куцак Р.С. Використання методу координатного еталону в задачах автоматизації контролю якості тканини.
Попруга А.Г. Усовершенствование электрических нагревателей по критерию экономии энергии.
Пашковский А.А., Далечин А.Ю. Система регистрации спектров фотолюминес-ценции
Никольский В.В., Цюпко Ю.М. Применение пьезоэлектрических датчиков в сис-теме кондиционирования воздуха судовых систем микроклимата.
Крапивко Г.И., Хлопёнова И.А. Повышение коэффициента полезного действия кремниевых фотоэлектронных преобразователей методом лазерной гравировки.
Кихтенко Д.А. Управление шаговыми двигателями в микрошаговом режиме, оп-тимизация управления.
Горохов В.А. Автоматизированная транспортно-складская система в текстильной и легкой промышленности.
Водічев В.А. Система стабілізації потужності різання фрезерного верстата з взаємозв'язаним керуванням швидкостями робочих рухів.
Шутов С.В., Аппазов Э.С., Марончук А.И. Испытание фотоэлектрических преобразователей в условиях экстремальных температурных колебаний.
Худяев А.А. К проблеме повышения точности воспроизведенияв классе многоканальных воспроизводящих систем с эталонной настройкой каналов.
Тверезовський В.С., Бараненко Р.В. Принцип побудови елементів вимірювальних систем, представлених цифровими програмно керованими давачами.
Никольский В.В., Сандлер А.К. Моделирование процессов в вискозиметре с пьезоэлектрическим приводом.
Марончук И.Е., Андронова Е.В., Баганов Е.А., Курак В.В. Использование метода импульсного охлаждения насыщенного раствора-расплава для формирования наноразмерных структур InSb в матрице GaSb.
Водічев В.А. Аналого-цифровий регулятор режиму металообробки для верстатів з числовим програмним керуванням.
Блинов Э.И., Кравцов В.И., Кравцов А.В., Недбайло А.Н. Управление гибкими протяженными объектами направленными силовыми воздействиями.