УДК 664:004.89
ОПЕРАТИВНА НЕЙРОМЕРЕЖНА ІДЕНТИФІКАЦІЯ
СКЛАДНИХ ОБ’ЄКТІВ КЕРУВАННЯ
Слань Ю. М., Трегуб В. Г.
Однією з фундаментальних в теорії систем автоматичного керування є задача ідентифікації технологічного об’єкта керування. Її метою є побудова ідентифікаційної моделі ![]() , що апроксимує об’єкт P (рис. 1) [1]:
, що апроксимує об’єкт P (рис. 1) [1]:
![]() (1)
(1)
для деякого заданого e>0 і визначеної норми ||...||.
В рівнянні (1) ![]() — виходи ідентифікаційної моделі, U — допустима множина керувань. Причому, як для статичної, так і для динамічної систем оператор P неявно визначений парами сигналів вхід-вихід {u, y}.
— виходи ідентифікаційної моделі, U — допустима множина керувань. Причому, як для статичної, так і для динамічної систем оператор P неявно визначений парами сигналів вхід-вихід {u, y}.
Отже, задача полягає у побудові оптимальної відповідно до деякого критерію моделі за результатами спостережень за вхідними та вихідними змінними системи [2].
Вибір класу, до якого належить оператор ![]() , і самого оператора визначається множиною факторів, пов’язаних з бажаною точністю і аналітичним трактуванням моделі. До них відносяться адекватність представлення P з допомогою
, і самого оператора визначається множиною факторів, пов’язаних з бажаною точністю і аналітичним трактуванням моделі. До них відносяться адекватність представлення P з допомогою ![]() , складність ідентифікації, простота моделі, можливість її розширення та доповнення, а також можливість використання моделі в реальному масштабі часу. Вибір
, складність ідентифікації, простота моделі, можливість її розширення та доповнення, а також можливість використання моделі в реальному масштабі часу. Вибір ![]() залежить і від наявної апріорної інформації про структуру об’єкта [1].
залежить і від наявної апріорної інформації про структуру об’єкта [1].
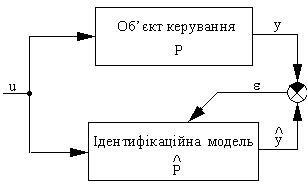
Рис. 1 Ідентифікація об’єкта керування
Завдяки своїм універсальним апроксимуючим властивостям штучні нейронні мережі (ШНМ) являють собою потужний інструмент для розв’язання задачі ідентифікації лінійних та нелінійних статичних та динамічних об’єктів керування, в тому числі стаціонарних або нестаціонарних. Побудовані на основі ШЕМ дискретні ідентифікаційні моделі називаються нейроемуляторами (НЕ) або предикторами. В загальному вигляді вони описуються наступним нелінійним рівнянням:
![]() , (2)
, (2)
де NN(...) — перетворення вхід-вихід, що виконує ШНМ, ![]() — глибина затримки зворотного зв’язку по виходу НЕ,
— глибина затримки зворотного зв’язку по виходу НЕ, ![]() — глибина затримки по входу НЕ.
— глибина затримки по входу НЕ.
Структуру штучної нейронної мережі, описану рівнянням (2), показано на рис. 2.
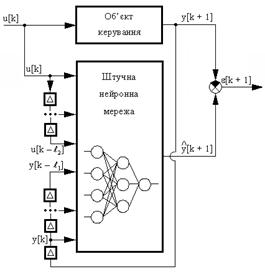
Рис. 2 Структура нейромережної ідентифікаційної моделі
Класично ідентифікація проводиться на основі визначених гіпотез і теоретичних досліджень за наявними експериментальними даними. При цьому особлива увага приділяється фізичному змісту отриманої моделі. Дійсно, отримана з допомогою ШНМ ідентифікаційна модель мало придатна для подальшого аналізу з метою з’ясувати сутність процесів що проходять всередині об’єкта. Це пов’язане з розподіленістю перетворення вхід-вихід, що проводиться нею за всіма нейронами мережі. Однак, відображення фізичної суті процесів і не є необхідною умовою ідентифікації, так як в адаптивній постановці задача полягає в оперативній побудові прогнозу поведінки об’єкта при визначеній стратегії управління.
У випадку необхідності ідентифікації системи в режимі реального часу, коли на кожному кроці синтезу сигналу керування необхідно мати адекватну модель реального об’єкту використовують так звані рекурентні методи оптимізації [2].
Особливості використання рекурентних алгоритмів при оптимізації параметрів нейронних мереж полягають на такому принципі, що на кожній ітерації використовується лише одна пара даних „вхід-вихід” {u, y} з множини експериментальних даних:
![]() , (3)
, (3)
де qі, qі–1 на поточному та попередньому кроках характеризують набір параметрів, що підлягають налаштуванню; µі — крок пошуку; fi — функція, що визначає напрям пошуку.
Більшість рекурентних алгоритмів [2 — 5] розроблені для оцінки досить простих лінійних моделей. У випадку, коли модельна структура містить велику кількість параметрів настройки, застосування рекурентних алгоритмів в режимі реального часу стає досить проблематичним. В даному випадку переналаштування параметрів мережі відбувається досить тривало і втрачаються її можливості ідентифікації об’єкта в реальному масштабі часу.
Одним з найпростіших методів реалізації рекурентних алгоритмів налаштування параметрів штучної нейронної мережі є рекурентний градієнтний метод. В теорії нейронних мереж цей метод отримав назву рекурентного методу зворотного поширення помилки. Для даного випадку величина fi в рівнянні (3) визначається таким чином [6]:
![]() , (4)
, (4)
де  , e (і, qі – 1) — різниця між сигналами на виході об’єкта та його нейромережної моделі.
, e (і, qі – 1) — різниця між сигналами на виході об’єкта та його нейромережної моделі.
В якості досліджуваного об’єкту використано послідовне з’єднання аперіодичної ланки першого порядку та ланки чистого запізнювання. При цьому динамічні параметри об’єкта є нестаціонарними, що виражається зміною його коефіцієнту передачі та сталої часу в межах 0,5 – 1,5 (од. вим. у / од. вим. u) та 50 – 150 с відповідно (за нормальним законом розподілу); збурення, змінюється аналогічно в межах –20% . . . +20%. На об’єкті працює лінійний ПІ-регулятор, параметри якого налаштовано шляхом їх почергової зміни до досягнення мінімального значення дисперсії розузгодження:
![]() . (5)
. (5)
Як нейромережний ідентифікатор дослідним шляхом обрано штучну нейронну мережу, що має чотири входи та складається з одного захованого шару з десятьма нейронами з логістичними функціями активації і вихідного шару з одним нейроном і лінійною функцією активації. Чотири входи мережі характеризують стан об’єкту на i – 1 та i – 2 кроках а також значення сигналу керування на поточному та попередньому кроках.
З використанням рекурентної процедури (3) – (4) за допомогою математичного пакету Matlab побудовано алгоритм оперативної нейромережної ідентифікації.
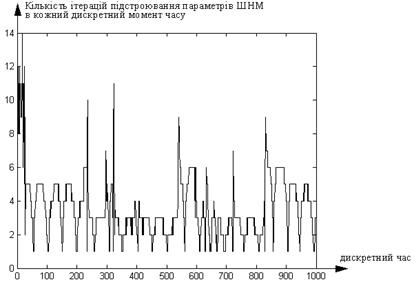
Рис. 3 Процедура оперативної нейромережної ідентифікації
На рис. 3 показано кількість ітерацій, що виконуються для підстроювання параметрів нейронної мережі, в кожний дискретний моменту часу роботи об’єкта. Ця процедура починає працювати кожного разу при зміні параметрів об’єкта керування і виникненні розузгодженості між виходом об’єкта та його оцінки на виході ідентифікатора. З малюнку видно, що на початкових кроках ідентифікації кількість ітерацій підстроювання може бути значно більша 0. Це пов’язане з тим, що потрібен деякий час для встановлення певної рівноваги між коефіцієнтами настройки нейронної мережі, тобто повинне відбутись попереднє її пристосування до об’єкту керування.
Результатом роботи процедури рекурентної ідентифікації є отримання адекватної оцінки вихідного параметру об’єкта. На рис. 4. суцільною лінією показано реалізацію випадкового процесу на виході об’єкта, а маркерами „*” показано сигнали на виході оперативного ідентифікатора через кожні 10 дискретних моментів часу. Основною вимогою застосування оперативного ідентифікатора є те, що при цьому динаміка нестаціонарності об’єкта керування повинна бути повільнішою за період переналаштування його параметрів.
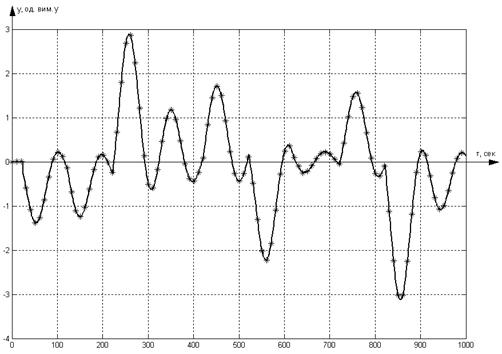
Рис. 4 Оперативна нейромережна ідентифікація нестаціонарного об’єкта керування
Висновки. Проведені дослідження з нейромережними алгоритмами оперативної ідентифікації показали:
ü штучні нейронні мережі здатні давати адекватну оцінку параметрів стану об’єкта керування в реальному часі його роботи та оперативно відслідковувати їх зміни для прийняття відповідних рішень щодо розрахунку нових керуючих впливів;
ü градієнтний рекурентний метод настроювання параметрів штучної нейронної мережі має досить високу швидкодію та не вимагає великих затрат оперативної пам’яті.
Article describes the results of the operative neural-network identification based on recurrent gradient method tuning of the artificial neural network parameters. This algorithm is the fastest and most elementary between the methods of this class. It requires the least expense of the operative memory.
1. Narendra K. S., Parthasarathy K. Identification and control of dynamical systems using neural networks / / IEEE Transactions on Neural Networks.— 1990.— Vol. 1.— No. 1.— p. 4 – 27.
2. Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ.— М.: Наука. Гл. ред. физ.–мат. лит., 1991.— 432 с.
3. Гроп Д. Методы идентификации систем: Пер. с англ.— М.: Мир, 1979.— 302 с.
4. Сейдж Э. П., Мелса Д. Л. Идентификация систем управления: Пер с англ.— М.: Наука. Гл. ред. физ.–мат. лит., 1974.— 248 с.
5. Цыпкин Я. З. Информационная теория идентификации.— М.: Наука, 1995.— 336 с.
6. Методы робастного, нейро-нечеткого и адаптивного управления / Под ред. Н. Д. Егупова.— М.: Изд.-во МГТУ им. Баумана, 2002.— 744 с.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Информационно-измерительные системы
Ковальов О.І. Вимірювання у процесно-орієнтованих стандартахПолякова М.В., Ищенко А.В., Худайбердин Э.И. Порогово-пространственная сегментация цветных текстурированных изображений на основе метода JSEG
Дзюбаненко А. В. Организация компьютерных систем для анализа изображений
Гордеев Б.Н., Зивенко А.В., Наконечный А.Г. Формирование зондирующих импульсов для полиметрических измерительных систем
Богданов А.В., Бень А.П., Хойна С.И. Релаксация обратного тока диодов Шоттки после их магнитно-импульсной обработки (МИО)
Тверезовский В.С., Бараненко Р.В. Проектирование измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Оптимизированная модель измерителя доб-ротности варикапов
Руднєва М.С., Кочеткова О.В., Задорожній Р.О. Принципи побудови оптимальної структури інформаційно-вимірювальної системи геометричних розмірів об’єктів в діапазоні від 1 нм до 1000 нм
Биленко М.С., Рожков С.А., Единович М.Б. Идентификация деформаций пе-риодических структур с использованием систем технического зрения
Рашкевич Ю.М., Ковальчук А.М., Пелешко Д.Д. Афінні перетворення в модифікаціях алгоритму RSA шифрування зображень
Дидык А.А., Фефелов А.А, Литвиненко В.И., Шкурдода С.В., Синяков Ф. В. Классификация масс-спектров с помощью кооперативного иммунного алгоритма
Клименко А.K. Обратная модель для решения задач в системах с многосвязными динамическими объектами
Завгородній А.Б. Порівняльне дослідження твердотільних і рідиннофазних об'єктів методом газорозрядної візуалізації
Голощапов С.С., Петровский А.В., Рожко Ж.А., Боярчук А.И. Измерение доб-ротности колебательного контура на основе метода биения частот
Кириллов О.Л., Якимчук Г.С. Диагностирование критерия безопасности при заполнении замкнутых объемов СПЖ косвенным методом
Долина В.Г. Проблеми підвищення точності рефрактометра на основі прозорих порожнистих циліндрів.
Самков О.В., Захарченко Ю.А. Застосування алгоритму клонального відбору для побудови планів модернізації авіаційної техніки
Попов Д.В. Метод формування регламентів технічного обслуговування повітряних суден
Казак В.М., Чорний Г.П., Чорний Т.Г. Оцінювання готовності технічних об’єктів з урахуванням достовірності їх контролю
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования цифрового измерителя добротности варикапов
Тверезовский В.С., Бараненко Р.В. Технические аспекты проектирования устройства для разбраковки варикапов по емкостным параметрaм и добротности
Сосюк А.В. Інтелектуальний автоматизований контроль знань в системах дистанційного навчання
Соколов А.Є. Деякі аспекти систезу комп’ютеризованої адаптивної системи навчання
Полякова М.В., Волкова Н.П., Іванова О.В. Сегментація зображень стохастичних текстур амплітудно-детекторним методом у просторі вейвлет-перетворення
Луцкий М.Г., Пономаренко А.В., Филоненко С.Ф. Обработка сигналов акустической эмиссии при определении положения сквозных дефектов
Литвиненко В.И., Дидык А.А., Захарченко Ю.А. Компьютерная система для решения задач классификации на основе модифицированных иммунных алгоритмов
Лубяный В.З., Голощапов С.С. Прямоотсчетные измерители расхождений емкостей
Беляев А.В. Построение навигации для иерархических структур в WEB-системах и системах управления WEB-сайтом
Терновая Т.И., Сумская О.П., Слободянюк И.И., Булка Т.И. Контроль качества тканей специального назначения с помощью автоматических систем.
Шеховцов А.В. Інформаційний аспект: розпізнавання образів індивідуума.
Полякова М.В. Определение границ сегмента упорядоченной текстуры на изображении с однородным фоном с помощью многоканального обнаружения пачки импульсов.
Литвиненко В.И. Прогнозирования нестационарных временных рядов с помощью синтезируемых нечетких нейронных сетей
Ковриго Ю.М., Мисак В.Ф., Мовчан А.П., Любицький С.В. Автоматизована система діагностики генераторів електростанцій
Браїловський В.В., Іванчук М.М., Ватаманюк П.П., Танасюк В.С. Керований детектор імпульсного ЯКР спектрометра
Забытовская О.И. Построение функции полезности по экспериментальным данным.
Шиманські З. Апаратні засоби сегментації мовного сигналу
Хобин В.А., Титлова О.А. К вопросу измерения парожидкостного фронта в дефлегматоре абсорбционно-диффузионной холодильной машины (АДХМ)
Фефелов А. А. Использование байесовских сетей для решения задачи поиска места и типа отказа сложной технической системы
Ролик А.И. Модель управления перераспределением ресурсов информационно-телекоммуникационной системы при изменении значимости бизнес-процессов
Кириллов О.Л., Якимчук Г.С., Якимчук С.Г. Изучение электрического поля с помощью датчика измерителя электростатического потенциала на модели замкнутого металлического объема
Грицик В.В. Застосування штучних нейронних мереж при проектуванні комп’ютерного зору.
Гасанов А.С. Информационные технологии построения систем прогнозирования отказов
Шеховцов А.В., Везумский А.К., Середа Е.С. Алгоритм сжатия информации без потерь: модифицированный алгоритм LZ77
Ходаков В.Е., Жарикова М.В., Ляшенко Е.Н. Методы и алгоритмы визуализации пространственных данных на примере моделирования распространения лесных пожаров.
Полякова М.В., Крылов В.Н. Обобщённые масштабные функции с компактным носителем в задаче сегментации изображений упорядоченных текстур. – C. 75 – 84.
Полторак В.П., Дорогой Я.Ю. Система распознавания образов на базе нечеткого нейронного классификатора.
Литвиненко В.И. Синтез радиально-базисных сетей для решения задачи дистанционного определения концентрации хлорофилла.
Бражник Д.А. Управление совмещением изображения объекта в сцене и эталонного изображения.
Бабак В.П., Пономаренко А.В. Локализация места положения сквозных дефектов по сигналам акустической эмиссии.
Мороз В. В. R-D проблема и эффективность систем сжатия изображений.
Крылов В.Н., Полякова М.В., Волкова Н.П. Контурная сегментация в пространстве гиперболического вейвлет-преобразования с использованием математической морфологии.
Квасников В.П., Баранов А.Г. Анализ влияния дестабилизирующих факторов на работу биканальной координатно-измерительной машины.
Казак В.М., Гальченко С.М., Завгородній С.О. Аналіз можливості застосування імовірнісних методів розпізнавання для виявлення пошкоджень зовнішнього обводу літака.
Тищенко И.А., Лубяный В.З. Управление коммутационными процессами в интегрированных сетях связи.
Корниенко-Мифтахова И.К.,Филоненко С.Ф. Информационно-измерительная система для анализа характеристик динамического поведения конструкций.
Тверезовский В.С., Бараненко Р.В. Модель измерителя емкости с линейной шкалой измерений.
Полякова М.В., Крылов В.Н. Мультифрактальный метод автоматизированного распознавания помех на изображении.
Рожков С.О., Федотова О.М. Алгоритм розпізнавання дефектів тканин для автоматичної системи контролю якості.
Бражник Д.А. Использование проективного преобразования для автоматизации обнаружения объектов.
Ходаков В.Є., Шеховцов А.В., Бараненко Р.В. Математичні аспекти створення автоматизованої системи „Реєстр виборців України”