УДК 681.586.773
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ В ВИСКОЗИМЕТРАХ С ПЬЕЗОЭЛЕКТРИЧЕСКИМ ПРИВОДОМ
Никольский В.В.
Уменьшение разведанных запасов нефти и рост экономики в ряде стран СНГ и Китая привели к ажиотажному спросу на этот вид сырья. Рост цен на черное золото только за последний год составил 100 %. Повышение цен сказалось на себестоимости морских перевозок. Вопрос эффективного использования топлива приобрел еще большую остроту. Он содержит в себе две взаимосвязанные компоненты: эффективность процесса топливосжигания, зависящая от правильной и устойчивой работы элементов топливной аппаратуры, и безотказная работа топливной аппаратуры, зависящая от качества приготовленной топливной смеси. Как известно, в процессе хранения топлива происходит расслоение его по фракциям. Поэтому по мере забора топлива из танка и подаче к форсунке его вязкость изменяется, для поддержания которой в заданном диапазоне используются автоматизированные системы регулирования. От вискозиметра, входящего в состав регулятора, зависит эффективность работы. Известно, что повышение точности вискозиметры на 0,01 приводит к экономии топлива при эксплуатации судна в течение года до 2-3 %.
Для топливной системы судовой энергетической установки представляют интерес вискозиметры, способные проводить измерения в тонких слоях (~10 мкм). Существующие конструкции пьезоэлектрических вискозиметров не позволяют решить эти задачи, при том, что с устройствами пьезоактивной механики разработано большое количество измерительных преобразователей [1]. Однако в судовых установка пьезокерамика практически не применяется [2]. В [3] было обосновано использование метода измерения вязкости на соосных цилиндрах, так как условия измерения полностью совпадают с работой плунжерных пар топливной аппаратуры.
В [4] рассмотрены перспективные типы вискозиметров, из которых выделяется группа вискозиметров на соосных цилиндрах с пьезоэлектрическим приводом, отличающегося высоким пусковым моментом, высокой чувствительностью к изменению нагрузочного момента, низкой стоимостью, нечувствительностью к магнитным полям и высокой надежностью.
Для проведения натурных испытаний необходимо было построить механические и математические модели.
В [5] получены дифференциальные уравнения первого порядка для описания пьезоэлектрических манипуляторов.
В [6] выведена линейная математическая модель для линейного пьезодвигателя (ЛПД).
В [7, 8, 9] обосновано применение в качестве привода вискозиметра на соосных цилиндрах пьезоэлектрических манипуляторов, линейных пьезодвигателей и нереверсивных пьезодвигателей с пассивным ротором.
Нами был разработан ряд конструкций вискозиметров на соосных цилиндрах с пьезоприводом [10, 11], структурные схемы которых приведены на рис.1. В [12] рассмотрены вискозиметры с пьезоманипуляторами.
Целью статьи является построение механических и математических моделей вискозиметров на соосных цилиндрах с приводом на ЛПД и возвратной пружиной и нереверсивном ПЭД с пассивным ротором.
а)
б)
в)
Рис. 1 Кинематические схемы вискозиметров на соосных цилиндрах: 1 - ПР; 2 – точка касания; 3 - шток; 4 – неподвижный цилиндр; 5 – подвижный цилиндр; 6 – корпус; 7 - маховик; 8 - пружина; 9 - звено
На основании допущений [5, 6] нами были получены механические и линейные математические модели для вискозиметров на соосных цилиндрах, представленные в виде линейных структурных схем, а также получены передаточные функции и амплитудно – частотные характеристики (АЧХ). На рис. 2 показана механическая модель вискозиметра с одним ЛПД и возвратной пружиной в момент удара пьезорезонатора (ПР) по штоку поршня.
Рис. 2 Механическая модель вискозиметра с одним ЛПД и возвратной пружиной
Здесь x3, y3, j3 - обобщенные координаты положения поршня; y5, j5, y6, j6 - обобщенные координаты положения роликов; m1 - приведенная масса ПР, m3 - масса поршня; m5, m6 - массы роликов; коэффициенты жесткости и диссипативных потерь: g1, h1, g2, h2 - ПР, g5, h5, g6, h6 - в подшипниках; g51, h51, g61, h61 - в точках контакта 5, 6; g3, h3, g4, h4, g7, h7 – триботехнического узла; усилия: Fc1 - пьезоэлектрическое, Fp1 - предварительного нагружения, FТ - топлива, FТР - силы трения; l1 - длина ПР; r5, r6 - радиусы роликов; a4, b2 - длина и высота поршня; К – коэффициент жесткости пружины.
Эту модель можно привести к линейной механической модели [6], так как поршень совершает перемещения только в направлении одной оси. Для описания взаимодействия ПР и поршня вводится коэффициент трансформации n=sin(arctg(a1/(2b1)). На рис. 3 представлена механическая модель при работе ПР в прямом направлении по перемещению поршня на встречу потоку топлива, на рис. 4 – при обратном движении поршня под действием пружины и давления топлива.
Рис. 3 Линейная механическая модель вискозиметра с ЛПД при движении поршня под действием ПР в прямом направлении
Рис. 4. Линейная механическая модель вискозиметра с ЛПД при движении поршня под действием пружины в обратном направлении
Полученной модели на рис. 3 можно поставить в соответствие линеаризованную математическую модель динамики вискозиметра (рис. 5), в которой к ранее полученной для ЛПД в [6] добавляется обратная связь в виде звеньев с передаточными функциями W9(р) и W6(р), характеризующие действие сил трения в триботехническом узле, где выходной координатой является Х - перемещение.
Рис. 5 Структурная схема линеаризованной математической модели вискозиметра с одним ЛПД и возвратной пружиной
На рис. 5 ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,  ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() -
сила, оказываемая топливом на поршень.
-
сила, оказываемая топливом на поршень.
Перенесем передаточную функцию влияния топлива в направлении источника питания ПР. Сворачивание структуры на рис. 5 приводит к следующей передаточной функции:
 , (1)
, (1)
где К0 – коэффициент обратного пьезоэффекта,; КП – коэффициент прямого пьезоэффекта; K0=KП=b×Y11×d31; Rвт – сопротивление генератора; С0 – электрическая емкость ПР, С0=e0e33(1-((d31)2Y11/(e0e33))2)l1l2/l3; mS - приведенная масса ПР и поршня; h – коэффициент упругости, h=l1l2/(s×10-12l3); g – коэффициент демпфирования; n – коэффициент передачи; W5(р) – сила упругости возвратной пружины; W7(р)=n – передаточная функция преобразования ударных воздействий ПР в линейное перемещение штока поршня, k – коэффициент жесткости пружины.
Для керамики ЦТС-19 значения параметров следующие [5]: e0=8.85×10-12 Ф/м, e33=1500, l1=1.9×10-3 м, l2=5.5×10-3 м, l3=19×10-3 м, mS=0.025 кг, n=0.5, Rвт=50 Ом, g=8.9×10-3 В×м/Н, s=16,5×10-12 м2/Н, r=7.6×103 кг/м3, Y11=8×1010 Па, d31=175×10-12 Кл/Н.
На рис. 6 представлены графики АЧХ X(w) вискозиметра с одним ЛПД при разных значениях b, входящего в передаточную функцию силы трения триботехнического узла, каковым является распылитель форсунки. Установлено, что а не значительно влияет на характеристики ЛПД.
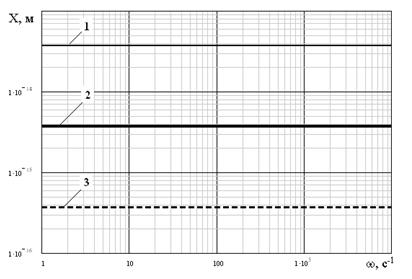
Рис. 6 АЧХ вискозиметра с одним ЛПД и возвратной пружиной X(w): 1 – b=0.1, 2 - b=1, 3 - b=10
Однако, этой же модели можно поставить в соответствие математическую модель, у которой выходным параметром будет скорость V(w) перемещения поршня в прямом направлении, которая выглядит, как показано на рис. 7.
Рис. 7 Структурная схема линеаризованной математической модели вискозиметра с одним ЛПД и возвратной пружиной с выходным параметром V(w)
Сворачивание схемы относительно V(w) приводит к передаточной функции следующего вида:
 . (2)
. (2)
АЧХ передаточной функции V(w) представлена на рис. 8.
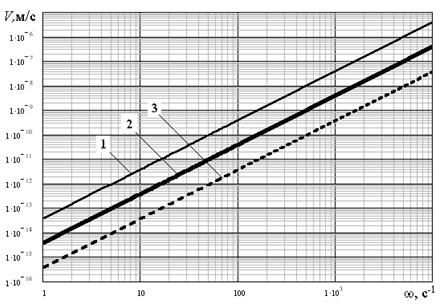
Рис. 8 АЧХ вискозиметра с одним ЛПД и возвратной пружиной V(w): 1 – b=0.1, 2 - b=1, 3 - b=10
Однако, при работе ЛПД с возвратной пружиной наблюдаются постоянные старт-стопные режимы. Для того, чтобы получить участок с равномерной скоростью, необходимо увеличивать длину поршня до 0,2 м, что не является приемлемым из-за возрастающих габаритных размеров. Поэтому в конструкцию вискозиметра был введен нереверсивный ПЭД, который с помощью кривошипно-шатунного механизма перемещает поршень внутри неподвижного цилиндра. При этом, частота вращения ротора ПЭД при одном значении вязкости остается постоянной. Учитывая выше изложенное, в линейную математическую модель введен коэффициент трансформации для скорости поршня:
![]() ,
(3)
,
(3)
где w - частота вращения ротора нереверсивного пьезодвигателя, l – длина кривошипа, R2 – радиус точки приведения кривошипа на роторе ПЭД. Построим линейную математическую модель вискозиметра с нереверсивным ПЭД (рис. 9) без учета давления топлива.
Рис. 9 Структурная схема линеаризованной математической модели вискозиметра с ПЭД и пассивным ротором
Здесь ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,  ,
, ![]() ,
, ![]() ,
,  .
.
Сворачивание структуры рис.9 приводит к передаточной функции v(р):
 , (4)
, (4)
где R1 – наружный радиус ротора.
Построим график АЧХ v(w) (рис. 10).
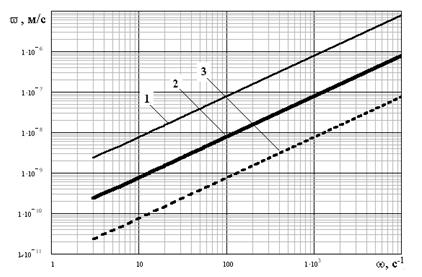
Рис.10 АЧХ вискозиметра с приводом на ПЭД с пассивным ротором v(w): 1 – b=0.1, 2 - b=1, 3 - b=10
Анализируя графики АЧХ можно прийти к выводу, что наибольшей чувствительностью обладают вискозиметры на соосных цилиндрах с нереверсивным ПЭД. При увеличении частоты ПР возрастает скорость перемещения поршня. У вискозиметра с ЛПД перемещение начинается практически с w=1 с-1 в момент подачи управляющего напряжения, а у вискозиметра с нереверсивным ПЭД только при w=3 с-1 , что объясняется наличием кривошипно-шатунной передачи.
Полученные результаты позволяют рассчитать конструкцию вискозиметра на соосных цилиндрах, выбрать тип привода и рассчитать режим его работы при заданных значениях вязкости топлива.
Дальнейшие исследования в этой области будут направлены на исследование характеристик реальных вискозиметров для сравнения с полученными теоретическими.
The problems of simulation of processes in viscosimeters on coaxial barrels with the drive on linear and non-reversing piezo engines with a passive rotary table are esteemed.
1. Джагупов Р.Г., Глазева О.В., Никольский В.В. Современные элементы и устройства пьезоактивной электромеханики // Придніпровський науковий вісник. Фіз.-мат. - Днепропетровск, 1998. - №6(73). - С. 31-48.
2. Никольский В.В., Плавинский Е.Б., Ерофеев С.А. Области применения пьезокерамики в судовых автоматизированных системах управления // матеріали 54 наук.-метод. конференції проф.-виклад. складу та курсантів. - Одеса: ОНМА, 2002 - С. 44.
3. Никольский В.В. Анализ применения пьезоэлектрических вискозиметров // Вимірювальна та обчислювальна техніка в технологічних процесах: наук. - техн. журнал - 2003. - №2 - Хмельницьк - С. 64-66.
4. Никольский В.В. Пьезоэлектрические вискозиметры // Материалы 10-й международной конференции по автоматическому управлению. - Севастополь: СевГТУ, 2003. - С. 82.
5. Никольский А.А. Точные двухканальные следящие электроприводы с пьезокомпенсаторами. - М.: Энергоатомиздат, 1988. - 160с.
6. Щербин А.М. Исполнительные элементы прецизионных пьезоэлектрических приводов с увеличенным диапазоном перемещения: Автореф. дис. ... канд.. техн. наук: 05.13.05 / ГТУ им. Н.Э.Баумана. - Москва, 1997. - 19 с.
7. Никольский В.В. Ротационные вискозиметры // Вимірювальна та обчислювальна техніка в технологічних процесах: збірник матеріалів конференції. - Хмельницький: ПП Ковальський, 2003. - Вип. №10. - С. 10 - 11.
8. Никольский В.В., Ханмамедов С.А. Ротационные вискозиметры // Вимірювальна та обчислювальна техніка в технологічних процесах: наук. - техн. журнал - Хмельницьк, 2003. - №1 - С. 38-41.
9. Никольский В.В., Ханмамедов С.А., Ядрова М.В. Пьезоэлектрический привод вискозиметра // Автоматизация судовых технических средств: науч. - техн. сб. - Одесса: ОНМА, 2003. - Вып. 8. - С. 64 - 71.
10. Нікольський В.В. Деклараційний патент України, МКІ 7 G01N11/10 Віскозиметр. - № 2003054350; Заявл. 15.05.2003; Опубл. 15.01.2004, Бюл. № 1.
11. Нікольський В.В. Деклараційний патент України, МКІ 7 G01N11/10 П’єзоелектричний віскозиметр. - № 2003109671; Заявл. 28.10.2003; Опубл. 15.09.2004, Бюл. № 9.
12. Никольский В.В., Сандлер А.К. Моделирование процессов в вискозиметре с пьезоэлектрическим приводом // Автоматика, автоматизация, электротехнические комплексы и системы: науч. - техн. журнал - Херсон: ХГТУ, 2003. - №1(11) - С. 95-100.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Моделирование объектов и систем управления
Соколов А.Е., Махова Е.О. Моделирование процесса принятия педагогического решения при компьютеризированном обученииСлавко О.Г. Порівняльний аналіз керування регулятором на основі локальної моделі керованого процесу та П-регулятором
Войтенко В.В., Дикусар Е.В, Ситников В.С. Определение частоты среза устройства сглаживания данных на основе метода скользящего среднего
Передерій В.І. Алгоритм визначення та оцінки характеристик ефективності комп’ютерних систем на початковій стадії проектування в умовах невизначенності
Ляшенко С.А, Ляшенко А.С. Оценка модели псевдолинейной регрессии
Ладієва Л.Р. Математична модель процесу газової мембранної дистиляції
Носов П.С., Косенко Ю.І. Нечіткі моделі і методи ідентифікації та прогнозу стану інформаційної моделі студента
Китаев А.В., Глухова В.И. Анализ работы синхронного двигателя с неявнополюсным ротором по данным каталога
Дорошкевич В.К., Пироженко А.В., Хитько А.В., Хорольский П.Г. К определению требований к системам увода космических объектов
Голінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи керування за імпульсною характеристикою об’єкта
Яшина К.В., Садовой А.В. Комплексная математическая модель тепловых процессов, происходящих в дуговых электросталеплавильных печах
Шейник С.П., Рудакова А.В. Использование функций принадлежности для моделирования параметров распределенных объектов
Хомченко А.Н., Литвиненко Е.И. Метод барицентрического усреднения граничных потенциалов электростатического поля
Селяков Е. Б. Моделирование требований к техническим системам методами математической логики
Тодорцев Ю.К., Ларіонова О.С., Бундюк А.М. Математична модель контура теплопостачання когенераційної енергетичної установки
Кириллов О.Л. , Якимчук Г.С. Моделирование процесса управления системой перегрузки углеводородных жидких топлив
Шеховцов А.Н., Козел В.Н. Построение математической модели формирования распределенных систем
Китаев А.В., Глухова В.И. Анализ поведения генератора постоянного тока по данным каталога
Хомченко А.Н., Козуб Н.О. Задачі наближення функцій: від лагранжевих до серендипових поліномів
Хобин В.А., Титлова О.А. Определение температуры парожидкостной смеси в дефлегматоре АДХМ по результатам измерений температуры его поверхности
Григорова Т.М., Усов А.В. Вероятностно-статистическое моделирование маршрутизированных пассажиропотоков в крупных городах
Горач О.О., Тернова Т.І. Моделювання технологічного процесу одержання трести при використані штучного зволоження з урахуванням складу мікрофлори
Дубік Р.М., Ладієва Л.Р. Математична модель розділення неоднорідних рідких систем
Казак В.М, Лейва Каналес Родриго, Яковицкая Е.Ю. Моделирование динамики полета магистрального самолета на исследовательском стенде
Завальнюк И.П. Исследование процесса торможения автомобиля как критического режима динамической системы
Дмитриев С.А., Попов А.В. Построение портрета неисправностей проточной части газотурбинного двигателя на примере АИ-25
Русанов С.А., Луняка К.В., Клюєв О.І., Глухов Г.М. Математичне моделювання робочого процесу в апаратах з віброкиплячим шаром та розробка систем автоматизованого моделювання гідродинаміки віброкиплячих шарів
Боярчук В.П., Сыс В.Б. Экспериментальные исследования влияния технологии шлихтования на изменение жесткости текстильных нитей
Селін Ю.М. Використовування контекстних марківських моделей для аналізу дії промислових вибухів на будівельні конструкції
Рудакова А.В. Проблемы интеграции сложных систем
Передерій В.І., Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Передерий В.И., Еременко А.П. Математические модели и алгоритмы принятия релевантных решений пользователями автоматизированных систем с учетом личностных и внешних факторов на базе генетических алгоритмов
Михайловская Т.В., Михалев А.И., Гуда А.И. Исследование правил клеточных автоматов для моделирования процессов затвердевания квазиравновесных бинарных сплавов
Хомченко А.Н., Колесникова Н.В. Явление «сверхсходимости» в задаче Прандтля для уравнения Пуассона
Китаев А.В., Глухова В.И. Анализ работы трансформатора по данным каталога
Квасницкий В.В., Ермолаев Г.В., Матвиенко М. В., Бугаенко Б.В., Квасницкий В.Ф. Оценка применимости метода компьютерного моделирования к исследованию напряженно-деформиррованного состояния цилиндрических узлов
Китаев А.И., Глухова В.И. Анализ работы асинхронного двигателя по данным каталога
Шелестов А.Ю Имитационная модель взаимодействия GRID-узлов с очередью доступа к общей памяти
Chizhenkova R.A. Mathematical Aspects of Bibliometrical Analysis of Neurophysiological Investigations of Action of Non-ionized Radiation (Medline-Internet)
Хомченко А.Н., Козуб Н.А. Геометрическое моделирование дискретных элементов с криволинейными границами
Славич В.П. Модель автоматизованої системи управління потоками транспортних засобів
Маркута О.В., Мысак В.Ф. Программная реализация и исследование особенностей метода группового учета аргументов
Степанкова Г.А., Баклан І.В. Побудова гібридних моделей на основі прихованих марківських моделей та нейронних мереж
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Математична модель процесу горіння природного газу з рециркуляцією продуктів згорання для цілей управління
Хомченко А.Н. Новые решения обобщенной задачи Бюффона
Передерий В.И., Еременко А.П. Математические модели и алгоритмы определения релевантности принимаемых решений с учетом психофункциональных характеристик пользователей при управлении автоматизированными динамическими системами
Ложечников В.Ф., Михайленко В.С., Максименко И.Н. Аналитическая много режимная математическая модель динамики газовоздушного тракта барабанного котла средней мощности
Ковриго Ю.М., Фоменко Б.В., Полищук И.А. Математическое моделирование систем автоматического регулирования с учетом ограничений на управление в пакете Matlab
Исаев Е.А., Наговский Д.А. Математическое описание влияния кривизны контактирующих тел на угол смачивания жидкости в межчастичном пространстве
Бідюк П.І., Литвиненко В.І., Кроптя А.В. Аналіз ефективності функціонування мережі Байєса
Тищенко И.А., Лубяный В.З. Математическое моделирование вокодера для определения оптимальной формы импульса сигнала возбуждения.
Николаенко Ю.И., Моисеенко С.В. Моделирование гармонического полиномиального базиса гексагона.
Козуб Н.А., Манойленко Е.С., Хомченко А.Н. Температурный тест для модифицированных базисов бикубической интерполяции.
Клименко А.К. Об упрощенном численном конструировании обратной модели динамического объекта.
Китаев А.В., Сушич Е.Ф. Расчет погрешностей измерительных трансформаторов.
Передерій В.І.,Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Шпильовий Л.В. Математична модель та алгоритм екстремального управління процесом осадження дисперсної фази суспензії.
Тулученко Г.Я. Інформаційний модуль експрес-пошуку точок еквівалентності процесу нейтралізації.
Тернова Т.І. Урахування морфогенетичного рівняння в математичній моделі тканини.
Попруга А.Г. Теоретические и экспериментальные исследования электрических нагревателей по критерию экономии энергии.