УДК 519.7
О ВЛИЯНИИ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ОБРАТНОЙ МОДЕЛИ НА ЕЁ УСТОЙЧИВОСТЬ
Клименко А.К.
1. Постановка проблемы и её связь с практическими заданиями
Последние годы характеризуются бурным развитием компьютерных информационных технологий. Использование аналитических преобразований совместно с численными методами даёт возможность создавать новые подходы для решения задач в различных областях науки и техники.
Для решения многих задач управления и контроля требуется применение обратной модели (ОМ) динамического объекта (ДО). Идеальная ОМ реального объекта, как известно [1], неосуществима. На аналоговых средствах техники удавалось создавать лишь приближенные ОМ для ДО, описываемых уравнениями не выше второго порядка. Применение средств вычислительной техники позволило найти технические решения ОМ [2,3], приближающие её показатели качества к идеальным и не зависящие от порядка описываемых ДО уравнений. Кроме того, на этих средствах удалось разработать и ОМ для многосвязного ДО [4].
При создании дискретной ОМ возникают две проблемы.
Первой из них является определение пределов изменения конструктивных параметров ОМ, в которых обеспечивается её устойчивость, а второй — уточнение этих параметров для получения желаемых показателей качества.
При создании дискретной обратной модели обе эти проблемы решаются путём нахождения двух конструктивных параметров – дискретности времени Т и временного сдвига τ. Уменьшение этих параметров дает возможность приближать показатели качества создаваемой модели к идеальной, но сопровождается повышением колебательности ОМ вплоть до потери устойчивости.
В техническом решении ОМ, приведенном в работах [2,3], не возникает проблемы обеспечения устойчивости в случае, когда ДО описываетя уравнением первого порядка. Повышение порядка уравнения приводит к проблеме как устойчивости, так и показателей качества. В ОМ [5] удаётся подавить колебательность, но проблема обеспечения устойчивости сохраняется. В работе [6] предлагается техническое решение ОМ, обеспечивающее возможность улучшать её показатели качества за счёт одновременного уменьшения параметров Т и τ. Устойчивость в этом случае может быть обеспечена при определенном соотношении между этими параметрами.
В данной работе рассматривается проблема определения области устойчивости создаваемой ОМ в функции двух конструктивных параметров: дискретности времени Т и временного сдвига τ.
Проблема рассматривается на примере ОМ [6] с получением выводов о применимости полученных результатов к другим техническим решениям её.
2. Анализ известных решений и применение их к исследованию устойчивости ОМ
Каждая из ОМ, рассматриваемых в данной работе, является замкнутой импульсной системой без непрерывной части. В её математическом описании нет алгебраического характеристического уравнения, поэтому для исследования её на устойчивость целесообразно обращаться к критерию Найквиста. Для этого прежде всего нужно найти математическое выражение частотной характеристики ОМ в разомкнутом состоянии.
Обратная модель создаётся для линейного стационарного динамического объекта (ДО), который устойчив и функционирует в непрерывном времени. В качестве математического описания ДО может выступать его передаточная функция W(s) или переходная характеристика h(t). Дальше в качестве математического описания ДО будем рассматривать его переходную характеристику (кривую переходного процесса). Последняя может быть получена как обратное преобразование Карсона-Хевисайда от его передаточной функции или найдена экспериментальным путём. Полагаем, что переходный процесс равен нулю в начальный момент времени и устанавливается на конечном интервале Т2, т.е.
![]() ,
, ![]() , (1)
, (1)
где ![]() — установившееся значение
переходного процесса.
— установившееся значение
переходного процесса.
Переходная характеристика может быть представлена в дискретном времени:
![]()
![]() (2)
(2)![]()
где T — шаг квантования (дискретность времени),
γ — дробная часть дискретного времени,
N2 — время затухания переходного процесса ![]() .
.
n — дискретное время ( ![]() ,
где
,
где ![]() - моменты непрерывного времени, кратные
- моменты непрерывного времени, кратные
![]() ).
).
В качестве математического описания ДО при конструировании ОМ используется числовой массив его импульсной переходной функции (ИПФ), который может быть получен из переходной характеристики (2) в дискретном времени:
![]()
![]()
![]() (3)
(3)
При разработке ОМ задаются численные
значения дискретности времени Т и временного сдвига ![]() в выражениях (2) и (3).
в выражениях (2) и (3).
Математическое описание приведенной в [3] ОМ имеет вид:
 , (4)
, (4)
где x(n) и c(n) – соответственно входной и выходной сигналы ОМ,
![]() –
переменная суммирования,
–
переменная суммирования,
t – конструктивный временной сдвиг, удовлетворяющий условиям:
![]()
![]() (5)
(5)
На основании приведенных в [3] материалов можно показать, что описываемая уравнением (4) ОМ устойчива по Найквисту, если на комплексной плоскости точку с координатами -1,j0 не охватывает частотный годограф
![]() ,
, ![]() ,
,![]() (6)
(6)
где ![]() - приведенная к дискретному
времени частота (
- приведенная к дискретному
времени частота (![]() ).
).
Приведенные выше зависимости (1-6) предназначены для использования при решении задач данной работы.
3. Постановка задач
Сформулированное выше условие устойчивости относится к техническому решению ОМ, приведенному в работе [3]. Оно не дает сведений о конкретном влиянии конструктивных параметров T и τ на устойчивость. Кроме того, нет сведений о возможности использования этого условия при исследовании на устойчивость ОМ по работе [6].
Задачами данной работы являются:
- нахождение условия устойчивости ОМ по техническому решению [6],
- определение границы устойчивости обратных моделей на плоскости параметров T и τ независимо от их технического выполнения.
4. Изложение материалов исследования
Известная из [6] ОМ описывается математической зависимостью
 , (7)
, (7)
где B – постоянный коэффициент, определяемый в процессе моделирования.
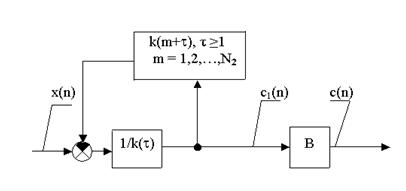
Рис.1 Структурная схема обратной модели
Эта ОМ может быть представлена как импульсная следящая система с изображённой на рис.1 структурной схемой. Звено с коэффициентом передачи B находится вне замкнутого контура и на устойчивость не влияет. Замкнутый же контур описывается уравнением (4), а его частотная характеристика в разомкнутом состоянии имеет вид (6).
Отсюда следует, что условия устойчивости у технических решений ОМ по [3] и [6] идентичны.
Для определения границы устойчивости ОМ на плоскости параметров T и τ поступаем следующим образом.
Как известно [7], частотная
характеристика разомкнутой импульсной системы симметрична относительно
действительной оси и пересекает её при относительной частоте ![]() . Полагаем, что разомкнутый контур
устойчив и его частотный годограф не пересекает действительной оси при
. Полагаем, что разомкнутый контур
устойчив и его частотный годограф не пересекает действительной оси при ![]() . Тогда необходимым и достаточным
условием устойчивости замкнутого контура будет выполнение неравенства:
. Тогда необходимым и достаточным
условием устойчивости замкнутого контура будет выполнение неравенства:
![]() (8)
(8)
Подставляем в неравенство (8)
выражение для ![]() из (6) и решаем его,
принимая во внимание, что
из (6) и решаем его,
принимая во внимание, что ![]() , а
, а ![]() . В результате решения получаем условие
устойчивости:
. В результате решения получаем условие
устойчивости:
![]() . (9)
. (9)
Обозначим правую часть неравенства
(9) символом ![]() и назовём её остаточной суммой знакопеременного
ряда чисел ИПФ ДО. Сам же числовой массив
и назовём её остаточной суммой знакопеременного
ряда чисел ИПФ ДО. Сам же числовой массив ![]() получен
из математического описания ДО при выбранных параметрах T и τ ОМ с использованием
зависимостей (3) и (5).
получен
из математического описания ДО при выбранных параметрах T и τ ОМ с использованием
зависимостей (3) и (5).
Условие устойчивости (9) словесно
можно сформулировать так: численные значения дискретности времени T и конструктивного временного сдвига τ
ОМ должны выбираться таким образом, чтобы первый член числового ряда ИПФ ДО ![]() был больше остаточной суммы
был больше остаточной суммы ![]() .
.
Переменные ![]() и
и
![]() являются функциями конструктивных
параметров ОМ:
являются функциями конструктивных
параметров ОМ: ![]() и
и ![]() .
На рис.2 в качестве примера приведены графики зависимостей
.
На рис.2 в качестве примера приведены графики зависимостей ![]() и
и ![]() от
величины дискретности
от
величины дискретности ![]() при постоянном значении τ.
При весьма малой дискретности имеет место
при постоянном значении τ.
При весьма малой дискретности имеет место ![]() <
<
![]() , что свидетельствует о неустойчивости
ОМ. При росте дискретности остаточная сумма
, что свидетельствует о неустойчивости
ОМ. При росте дискретности остаточная сумма ![]() сначала
увеличивается вместе с
сначала
увеличивается вместе с ![]() , а затем быстро уменьшается.
При определённом значении дискретности
, а затем быстро уменьшается.
При определённом значении дискретности ![]() = Т*
справедливо равенство
= Т*
справедливо равенство ![]() =
=![]() ,
что свидетельствует о границе устойчивости.
,
что свидетельствует о границе устойчивости.
В случае изменения параметра τ изменится и значение дискретности Т*, соответствующее границе устойчивости. Поэтому возникает потребность построить кривую границы устойчивости в плоскости параметров T и τ. Границе устойчивости соответствует преобразование неравенства (9) в равенство. Перенеся сумму из правой
части неравенства в левую и заменив знак неравенства на знак равенства, получим уравнение для построения кривой границы устойчивости:
![]() .
.
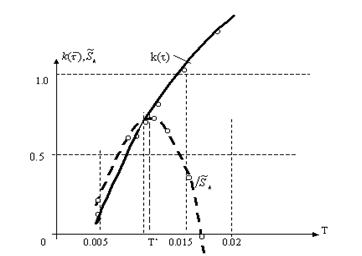
Рис.2
Графики зависимостей ![]() и
и ![]() от
дискретности T
от
дискретности T
Левая часть полученного уравнения представляет собой полную сумму знакопеременного ряда из числового массива ИПФ ДО. Она является функцией двух переменных. Обозначим её символом
![]()
![]()
Уравнение границы устойчивости получает вид:
![]() 0.
(10)
0.
(10)
5. Экспериментальная часть
Порядок построения кривой границы устойчивости на плоскости параметров T и τ для проверки полученных теоретических результатов состоит в следующем.
1. Задаются исходные данные о ДО, для которого создается ОМ. Таковыми является математическое описание кривой переходного процесса h(t) в непрерывном времени.
2. Задаются первые приближенные
значения конструктивных параметров T и τ. Например, ![]() =1, а дискретность
=1, а дискретность ![]() принимается равной одной десятой от
времени затухания переходного процесса T2.
принимается равной одной десятой от
времени затухания переходного процесса T2.
3. Вычисляется числовой массив h(n) по формуле (2), учитывая, что γ = τ.
4. Вычисляется числовой массив k(n+τ) по формуле (3).
5. Вычисляется полная сумма знакопеременного ряда и проверяется соответствие полученного значения уравнению (10).
6. Если ![]() 0,
то при заданных параметрах
0,
то при заданных параметрах ![]() и
и ![]() ОМ находится на границе устойчивости.
Это можно отметить постановкой точки на плоскости параметров и перейти к п.2,
задав новое значение
ОМ находится на границе устойчивости.
Это можно отметить постановкой точки на плоскости параметров и перейти к п.2,
задав новое значение ![]() .
.
7. Если ![]() >
0, что свидетельствует об устойчивости ОМ, вернуться к п.2, уменьшить ранее
заданную величину
>
0, что свидетельствует об устойчивости ОМ, вернуться к п.2, уменьшить ранее
заданную величину ![]() и повторить операции по
пунктам 3-5. В случае, если
и повторить операции по
пунктам 3-5. В случае, если ![]() < 0 , сделать то
же самое, но при увеличении
< 0 , сделать то
же самое, но при увеличении ![]() .
.
По полученным данным строится кривая границы устойчивости.
Пример такой кривой приведен на рис.3. Находящаяся ниже полученной кривой область параметров 1, отмеченная штриховкой, является областью неустойчивости.
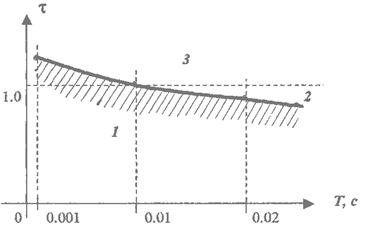
Рис.3 Граница устойчивости на плоскости параметров T и τ
Полученные результаты подтверждены моделированием. При этом были использованы как специально разработанные программы, так и пакет прикладных программ MathCad.
6. Выводы по результатам исследования и перспективы
Наличие графика границы устойчивости на плоскости параметров облегчает разработку обратной модели для данного ДО. Сам график может выступать как составная часть математического описания ДО.
Процесс конструирования ОМ сводится к выполнению следующих операций.
Из исходного математического описания ДО строится
кривая переходного процесса и устанавливается время его угасания. Определяются
первоначальные значения параметров ![]() и
и ![]() ,
Вычисляются числовые массивы h(n) и k(n).
,
Вычисляются числовые массивы h(n) и k(n).
Строится кривая границы устойчивости (10).
По кривой границы устойчивости выбирается техническое решение ОМ.
Выбор совокупности значений T и τ в области 1 по рис.3 неприемлем, т.к. не обеспечивает устойчивости ОМ. Если желаемые параметры находятся в области 2 , то может быть использовано техническое решение ОМ из [3] или [5]. При нахождении совокупности конструктивных параметров ОМ в области 3 выбирается техническое решение [6].
Полученные результаты создают предпосылки для разработки методики численного конструирования ОМ с получением желаемых показателей качества. Работа в этом направлении ведётся.
Изложенные результаты могут быть использованы и в инженерно-педагогических учебных пособиях для освоения новых способов решения задач на основе современных компьютерных технологий.
Influence of step-type behavior of time and shift of time for stability of discrete inverse model is considered. The condition of stability as a function of initial parameters of modeling object and design data of inverse model is determined. The limit of stability on a plane of parameters is considered.
1. Петров Б.Н., Кухтенко А.И. Теория проектирования инвариантных систем. Современные методы проектирования систем автоматического управления / Под ред. Б.Н. Петрова, В.В. Солодовникова, Ю.И. Топчеева. – М.: Машиностроение, 1967. – С. 18 – 78.
2. Клименко А.К., Клименко В.Г. Корректирующее устройство. А.с. 1406563 (СССР).
3. Клименко А.К. Обратная динамическая модель для решения задач управления и контроля качества // Методы менеджмента качества . – 1999. - № 8. – С. 32 – 39.
4. Клименко А.К. Обратная модель для контроля качества многосвязных динамических объектов // Методы менеджмента качества. – 2000. - № 5. – С. 36-40.
5. Клименко А.К. О подавлении колебаний в дискретной обратной модели // Надёжность и качество 2002: Труды международного симпозиума /Под ред. Н.К.Юркова.— Пенза : Информационно-издательский центр Пенз. гос. ун-та, 2002. – С. 138-139.
6. Клименко А.К. Обратная модель с улучшенными показателями качества // Надёжность и качество 2003: Труды международного симпозиума /Под ред. Н.К.Юркова.— Пенза : Информационно-издательский центр Пенз. гос. ун-та, 2003. – С.237-239.
7. Цыпкин Я.З. Теория линейных импульсных систем. – М.: Физматгиз, 1963. – С.269.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Моделирование объектов и систем управления
Соколов А.Е., Махова Е.О. Моделирование процесса принятия педагогического решения при компьютеризированном обученииСлавко О.Г. Порівняльний аналіз керування регулятором на основі локальної моделі керованого процесу та П-регулятором
Войтенко В.В., Дикусар Е.В, Ситников В.С. Определение частоты среза устройства сглаживания данных на основе метода скользящего среднего
Передерій В.І. Алгоритм визначення та оцінки характеристик ефективності комп’ютерних систем на початковій стадії проектування в умовах невизначенності
Ляшенко С.А, Ляшенко А.С. Оценка модели псевдолинейной регрессии
Ладієва Л.Р. Математична модель процесу газової мембранної дистиляції
Носов П.С., Косенко Ю.І. Нечіткі моделі і методи ідентифікації та прогнозу стану інформаційної моделі студента
Китаев А.В., Глухова В.И. Анализ работы синхронного двигателя с неявнополюсным ротором по данным каталога
Дорошкевич В.К., Пироженко А.В., Хитько А.В., Хорольский П.Г. К определению требований к системам увода космических объектов
Голінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи керування за імпульсною характеристикою об’єкта
Яшина К.В., Садовой А.В. Комплексная математическая модель тепловых процессов, происходящих в дуговых электросталеплавильных печах
Шейник С.П., Рудакова А.В. Использование функций принадлежности для моделирования параметров распределенных объектов
Хомченко А.Н., Литвиненко Е.И. Метод барицентрического усреднения граничных потенциалов электростатического поля
Селяков Е. Б. Моделирование требований к техническим системам методами математической логики
Тодорцев Ю.К., Ларіонова О.С., Бундюк А.М. Математична модель контура теплопостачання когенераційної енергетичної установки
Кириллов О.Л. , Якимчук Г.С. Моделирование процесса управления системой перегрузки углеводородных жидких топлив
Шеховцов А.Н., Козел В.Н. Построение математической модели формирования распределенных систем
Китаев А.В., Глухова В.И. Анализ поведения генератора постоянного тока по данным каталога
Хомченко А.Н., Козуб Н.О. Задачі наближення функцій: від лагранжевих до серендипових поліномів
Хобин В.А., Титлова О.А. Определение температуры парожидкостной смеси в дефлегматоре АДХМ по результатам измерений температуры его поверхности
Григорова Т.М., Усов А.В. Вероятностно-статистическое моделирование маршрутизированных пассажиропотоков в крупных городах
Горач О.О., Тернова Т.І. Моделювання технологічного процесу одержання трести при використані штучного зволоження з урахуванням складу мікрофлори
Дубік Р.М., Ладієва Л.Р. Математична модель розділення неоднорідних рідких систем
Казак В.М, Лейва Каналес Родриго, Яковицкая Е.Ю. Моделирование динамики полета магистрального самолета на исследовательском стенде
Завальнюк И.П. Исследование процесса торможения автомобиля как критического режима динамической системы
Дмитриев С.А., Попов А.В. Построение портрета неисправностей проточной части газотурбинного двигателя на примере АИ-25
Русанов С.А., Луняка К.В., Клюєв О.І., Глухов Г.М. Математичне моделювання робочого процесу в апаратах з віброкиплячим шаром та розробка систем автоматизованого моделювання гідродинаміки віброкиплячих шарів
Боярчук В.П., Сыс В.Б. Экспериментальные исследования влияния технологии шлихтования на изменение жесткости текстильных нитей
Селін Ю.М. Використовування контекстних марківських моделей для аналізу дії промислових вибухів на будівельні конструкції
Рудакова А.В. Проблемы интеграции сложных систем
Передерій В.І., Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Передерий В.И., Еременко А.П. Математические модели и алгоритмы принятия релевантных решений пользователями автоматизированных систем с учетом личностных и внешних факторов на базе генетических алгоритмов
Михайловская Т.В., Михалев А.И., Гуда А.И. Исследование правил клеточных автоматов для моделирования процессов затвердевания квазиравновесных бинарных сплавов
Хомченко А.Н., Колесникова Н.В. Явление «сверхсходимости» в задаче Прандтля для уравнения Пуассона
Китаев А.В., Глухова В.И. Анализ работы трансформатора по данным каталога
Квасницкий В.В., Ермолаев Г.В., Матвиенко М. В., Бугаенко Б.В., Квасницкий В.Ф. Оценка применимости метода компьютерного моделирования к исследованию напряженно-деформиррованного состояния цилиндрических узлов
Китаев А.И., Глухова В.И. Анализ работы асинхронного двигателя по данным каталога
Шелестов А.Ю Имитационная модель взаимодействия GRID-узлов с очередью доступа к общей памяти
Chizhenkova R.A. Mathematical Aspects of Bibliometrical Analysis of Neurophysiological Investigations of Action of Non-ionized Radiation (Medline-Internet)
Хомченко А.Н., Козуб Н.А. Геометрическое моделирование дискретных элементов с криволинейными границами
Славич В.П. Модель автоматизованої системи управління потоками транспортних засобів
Маркута О.В., Мысак В.Ф. Программная реализация и исследование особенностей метода группового учета аргументов
Степанкова Г.А., Баклан І.В. Побудова гібридних моделей на основі прихованих марківських моделей та нейронних мереж
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Математична модель процесу горіння природного газу з рециркуляцією продуктів згорання для цілей управління
Хомченко А.Н. Новые решения обобщенной задачи Бюффона
Передерий В.И., Еременко А.П. Математические модели и алгоритмы определения релевантности принимаемых решений с учетом психофункциональных характеристик пользователей при управлении автоматизированными динамическими системами
Ложечников В.Ф., Михайленко В.С., Максименко И.Н. Аналитическая много режимная математическая модель динамики газовоздушного тракта барабанного котла средней мощности
Ковриго Ю.М., Фоменко Б.В., Полищук И.А. Математическое моделирование систем автоматического регулирования с учетом ограничений на управление в пакете Matlab
Исаев Е.А., Наговский Д.А. Математическое описание влияния кривизны контактирующих тел на угол смачивания жидкости в межчастичном пространстве
Бідюк П.І., Литвиненко В.І., Кроптя А.В. Аналіз ефективності функціонування мережі Байєса
Тищенко И.А., Лубяный В.З. Математическое моделирование вокодера для определения оптимальной формы импульса сигнала возбуждения.
Николаенко Ю.И., Моисеенко С.В. Моделирование гармонического полиномиального базиса гексагона.
Козуб Н.А., Манойленко Е.С., Хомченко А.Н. Температурный тест для модифицированных базисов бикубической интерполяции.
Клименко А.К. Об упрощенном численном конструировании обратной модели динамического объекта.
Китаев А.В., Сушич Е.Ф. Расчет погрешностей измерительных трансформаторов.
Передерій В.І.,Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Шпильовий Л.В. Математична модель та алгоритм екстремального управління процесом осадження дисперсної фази суспензії.
Тулученко Г.Я. Інформаційний модуль експрес-пошуку точок еквівалентності процесу нейтралізації.
Тернова Т.І. Урахування морфогенетичного рівняння в математичній моделі тканини.
Попруга А.Г. Теоретические и экспериментальные исследования электрических нагревателей по критерию экономии энергии.