УДК 519-7
ОБ УПРОЩЕННОМ ЧИСЛЕННОМ КОНСТРУИРОВАНИИ ОБРАТНОЙ МОДЕЛИ ДИНАМИЧЕСКОГО ОБЪЕКТА
Клименко А.К.
1.Введение
В решении задач управления и контроля часто возникает проблема создания обратной модели (ОМ) реального динамического объекта (ДО). Примерами систем, нуждающихся в разработке обратной модели, могут служить инвариантные системы управления, системы регулирования по самоустанавливающейся программе, адаптивные системы и системы идентификации. Идеальная ОМ реального объекта, как известно [1], физически неосуществима. На аналоговых средствах техники удавалось создавать лишь приближенные ОМ для ДО, описываемых уравнениями не выше второго порядка.
Известно [2] применение динамических моделей в системах управления, но при этом возникает потребность упрощения технических решений.
Применение средств дискретной вычислительной техники позволило найти технические решения ОМ для ДО, описываемых уравнениями произвольного порядка. В этих ОМ максимально сохраняются свойства идеальных, но за это необходимо платить добавлением к ним временного запаздывания. Первым из таких решений явилось корректирующее устройство [3]. Теоретическое обоснование его работоспособности и свойств изложены в работе [4]. В работе [5] рассматриваются технические решения по улучшению показателей качества создаваемых ОМ.
В упомянутых работах рассматриваются россыпью вопросы осуществимости, устойчивости и конструирования ОМ для ДО с различными ограничениями. Решения отличаются в зависимости от свойств ДО. Нет общего решения. В частности, возникают проблемы при осуществлении ОМ для ДО, которые имеют чистое временное запаздывание и/или описываются уравнениями высокого порядка.
При разработке ОМ на средствах дискретной вычислительной техники корректировалось математическое описание ДО в сторону опережения по времени с обеспечением физической осуществимости скорректированного ДО (СДО). Под осуществимостью дальше будем понимать следующее: сигнал на выходе СДО может появляться не раньше поступления входного. В опубликованных работах методика корректирования ДО в сторону опережения не рассматривалась. Поэтому возникают трудности при разработке ОМ с желаемыми показателями качества. Отсутствует методика конструирования ОМ для отличных друг от друга ДО. Целью данной работы является восполнение указанного пробела. Рассматриваются вопросы:
- определение требований к математическому описанию СДО в обеспечение осуществимости для него ОМ;
- формирование математического описания СДО, исходя из описания исходного ДО;
- осуществление ОМ для ДО с использованием для этой цели СДО;
- обобщение методики конструирования ОМ.
2. Основание для постановки задачи
Причиной постановки задачи в данной работе явились следующие обстоятельства.
Считается общеизвестным, что идеальная ОМ реального ДО физически неосуществима. Но нет правил без исключений. Одно из таких исключений помогает решению задачи конструирования ОМ. Это исключение состоит в следующем. Существуют реальные ДО, для которых идеальная ОМ физически осуществима. Примерами могут служить безынерционное динамическое звено (усилитель) или некоторые из ДО, которые обладают инерционностью. Знание их свойств позволит определить требования к корректировке ДО для обеспечения для него осуществимости идеальной ОМ.
Рассмотрим один из таких примеров.
Как известно [6], в системах автоматического управления используются корректирующие звенья, одним из которых является интегрирующее. Его передаточная функция:
![]() , T2> T1, (1)
, T2> T1, (1)
где T1 , T2 – постоянные времени, s – комплексная переменная.
Идеальная ОМ для этого объекта имеет следующую передаточную функцию
![]() , T2>T1. (2)
, T2>T1. (2)
ОМ, описываемая передаточной функцией (2), также может быть реализована на практике как дифференцирующее звено, т.е. идеальная ОМ для реального ДО (1) физически осуществима.
Исходя из свойств интегрирующего звена, описанного передаточной функцией (1), можно сформулировать требования к ДО для обеспечения осуществимости для него идеальной ОМ. В качестве математического описания ДО будем использовать переходную характеристику (ПХ), представляющую, как известно [6], его реакцию на единичное ступенчатое воздействие. В рассматриваемом примере идеальная ОМ физически осуществима, если ПХ ДО в отрицательной области времеии тождественно равна нулю, а в нулевой момент времени ее значение отлично от нуля и конечно. Установившееся значение кривой переходного процесса также конечно. Если кривую переходного процесса обозначить символом h(t), где t – непрерывное время, то приведенные выше требования можно представить в таком виде:
![]() ,
, ![]() ,
, ![]() ,
, ![]() , (3)
, (3)
где ![]() – установившееся значение ПХ.
– установившееся значение ПХ.
Эти требования могут быть представлены и в дискретном времени, что будет сделано ниже.
Исходя из изложенного, можно предложить следующий способ решения задачи создания ОМ для заданного ДО. Математическое описание ДО корректируется таким образом, чтобы получить СДО, удовлетворяющий требованиям (3). Для него создается идеальная ОМ, которая явится приближенной ОМ для исходного ДО. Показатели качества приближенной ОМ уточняются в процессе конструирования.
3. Исходные данные и постановка задачи
Предполагается, что ДО, для которого требуется создать ОМ, линейный, стационарный, устойчив. В качестве исходного математического описания ДО выступает его ПХ, именуемая также и кривой переходного процесса. ПХ может быть получена как различными аналитическими способами, так и методами электронного моделирования или технического эксперимента.
В качестве примера ДО в данной работе будет рассматриваться типовая непрерывная следящая система. За математическое описанием ее принимается ПХ ![]() в непрерывном времени. На рис.1 изображен типовой график такой ПХ.
в непрерывном времени. На рис.1 изображен типовой график такой ПХ.
В качестве параметров ПХ будем использовать те, которые приняты в литературе по автоматическому управлению (см., например, [6]). К ним относятся:
hуст – установившееся значение переходного процесса,
τ0 – чистое временное запаздывание ДО,
Δ – малая величина, принимаемая за допустимую ошибку,
T1 – время переходного процесса ![]() ,
,
Т3 – временное запаздывание,
hmax – максимальное значение переходного процесса.
Параметры Т3 и hmax используются при оценке показателей качества создаваемой ОМ, а остальные – при конструировании ее.
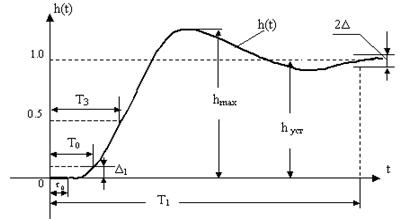
Рис.1 Кривая переходного процесса ДО
Для решения задачи конструирования ОМ введем также параметр Т0 – начальное временное запаздывание ДО. Оно превышает чистое временное запаздывание ДО (Т0 > τ0) и удовлетворяет требованиям:
![]() ,
, ![]() , (4)
, (4)
где ![]() - конечная постоянная величина.
- конечная постоянная величина.
В качестве исходных данных при постановке задачи приведём и краткие сведения о техническом решении ОМ, описанном в [4]. ОМ является дискретным устройством, конструктивными параметрами которого выступают дискретность времени Т и конструктивный временной сдвиг τ. Для осуществления ОМ составляется математическое описание СДО, который сдвинут относительно исходного ДО в сторону опережения и физически осуществим. СДО описывается импульсной переходной функцией (ИПФ) в дискретном времени. Числовой массив ИПФ может быть получен из кривой переходного процесса ДО h(t):
![]() , n=0,1,2,…,N, (5)
, n=0,1,2,…,N, (5)
где t – непрерывное время,
T – дискретность (шаг квантования) времени,
n – дискретное время (![]() ,
, ![]() –моменты непрерывного времени, кратные Т),
–моменты непрерывного времени, кратные Т),
N – время затухания переходного процесса ,
τ – временной сдвиг в сторону опережения.
Для обеспечения физической осуществимости СДО и работоспособности создаваемой ОМ ИПФ (5) должна удовлетворять требованиям:
![]() , (6)
, (6)
![]() , (7)
, (7)
![]() , (8)
, (8)
 (9)
(9)
Эти требования совпадают с требованиями (3).
В ОМ [4] реализуется математическая зависимость:
 , (10)
, (10)
![]() , (11)
, (11)
где x(n),c(n) – соответственно входной и выходной сигналы ОМ.
ОМ, описываемая формулой (10), обладает недостатками в области осуществимости, устойчивости и достижимых показателей качества. Эти недостатки объясняются невозможностью осуществить временное опережение на величину более одного такта дискретного времени из-за несовместимости в этом случае условий (6) и (11).
Для устранения указанных недостатков в работе [5] рассматривается техническое решение ОМ с улучшенными показателями качества. При её осуществлении обеспечивается возможность подавления колебательности и сохранения устойчивости в случаях, когда ДО описывается уравнением высокого порядка и/или имеет существенное чистое временное запаздывание.
Математическое описание указанной ОМ имеет вид:
 , (12)
, (12)
где ![]() – конструктивный временной сдвиг, не ограничиваемый выражением (11), но обеспечивающий выполнение условия (7);
– конструктивный временной сдвиг, не ограничиваемый выражением (11), но обеспечивающий выполнение условия (7);
B – статический коэффициент, обеспечивающий правильность формулы (12) в случае, когда ![]() >1.
>1.
Вывод этой формулы в работе [5] не приведен и отсутствует аналитическое выражение для коэффициента B. Для доказательства справедливости формулы (12) и нахождения аналитического выражения для коэффицента В нужно создать СДО, в ИПФ которого выполняются условия (7) и (9) при ![]() >1.
>1.
Первой из задач в данной работе является формирование ИПФ СДО, который по своим свойствам, за исключением упреждающего временного сдвига на ![]() , максимально близок к исходному ДО и обеспечивает возможность конструирования ОМ. Указанная ОМ для СДО будет идеальной, а для исходного ДО – приближенной.
, максимально близок к исходному ДО и обеспечивает возможность конструирования ОМ. Указанная ОМ для СДО будет идеальной, а для исходного ДО – приближенной.
ИПФ СДО обозначим символом ![]() . Требования к ИПФ:
. Требования к ИПФ:
![]() , (13)
, (13)
![]() , (14)
, (14)
![]() , (15)
, (15)
 (16)
(16)
Численные значения ![]() нужно определить через ИПФ ДО (5) при уже выбранных значениях параметров Т и τ.
нужно определить через ИПФ ДО (5) при уже выбранных значениях параметров Т и τ.
Второй задачей данной работы является нахождение математического описания ОМ, обеспечивающей работоспособность при произвольном увеличении конструктивного временного сдвига τ.
Третья задача – разработка обобщенной методики конструирования ОМ с обсуждением вопросов обеспечения устойчивости и получения желаемых показателей качества.
4. Корректировка динамического объекта в сторону опережения
Исходный ДО описывается ПХ ![]() , которая имеет начальное временное запаздывание
, которая имеет начальное временное запаздывание ![]() , время переходного процесса
, время переходного процесса ![]() и обладает свойствами:
и обладает свойствами:
![]() ,
, ![]() ,
, ![]() .
.
При переходе на дискретное время с дискретностью ![]() эти свойства получат вид:
эти свойства получат вид:
![]() ,
, ![]() ,
, ![]() ,
,
где ![]() ,
, ![]() .
.
Рассмотрим задачу аналитического определения численных значений ИПФ СДО через параметры исходного ДО в соответствии с требованиями (13)—(16).
Решение задачи иллюстрируется приведенными на рис.2 графиками ИПФ ДО в исходном, промежуточном и скорректированном состояниях. ИПФ являются функциями дискретного времени, а кривые изображают огибающие их значений. Символами обозначены: ![]() — ИПФ исходного ДО (пунктир),
— ИПФ исходного ДО (пунктир), ![]() — ИПФ СДО (жирная линия),
— ИПФ СДО (жирная линия), ![]() — ИПФ промежуточного (физически неосуществимого) ДО.
— ИПФ промежуточного (физически неосуществимого) ДО.
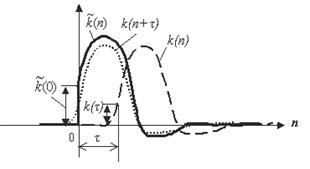
Рис. 2 Графики ИПФ в исходном, промежуточном и скорректированном состояниях
Последовательность действий при решении задачи.
Формируем массив ИПФ исходного ДО, согласно (5) с уже выбранной дискретностью времени Т и равным нулю значением временного сдвига τ : ![]() . Огибающая дискретных значений ИПФ
. Огибающая дискретных значений ИПФ ![]() изображена на графике пунктиром.
изображена на графике пунктиром.
Выбираем конструктивный временной сдвиг τ, удовлетворяющий условию (7), и формируем массив ИПФ сдвинутого на это опережение промежуточного ДО ![]() . Кривая этого массива изображена точками. ДО с ИПФ
. Кривая этого массива изображена точками. ДО с ИПФ ![]() физически неосуществим по той причине, что начальная часть кривой оказывается в левой полуплоскости, соответствующей отрицательному времени.
физически неосуществим по той причине, что начальная часть кривой оказывается в левой полуплоскости, соответствующей отрицательному времени.
Отсекаем часть ИПФ ![]() в левой полуплоскости и корректируем ее оставшиеся числовые значения в правой полуплоскости для сохранения установившегоя значения ПХ
в левой полуплоскости и корректируем ее оставшиеся числовые значения в правой полуплоскости для сохранения установившегоя значения ПХ ![]() . Полученный после правки числовой массив и составит ИПФ СДО. Этот массив мы ищем и уже обозначили символом
. Полученный после правки числовой массив и составит ИПФ СДО. Этот массив мы ищем и уже обозначили символом ![]() . Он должен удовлетворять требованиям (13)—(16). На рис.2 кривая этого массива изображена жирной линией.
. Он должен удовлетворять требованиям (13)—(16). На рис.2 кривая этого массива изображена жирной линией.
А теперь перейдем к определению значений ИПФ СДО, если известны значения ИПФ ДО при заданных конструктивных параметрах Т и τ.
Полагаем, что выбранный нами параметр τ удовлетворяет условию (7) и, в общем случае, существенно превосходит дискретность времени Т. Он может быть записан в виде:
![]() , (17)
, (17)
где j – целое положительное число (![]() ), а
), а ![]() – дробная часть (
– дробная часть (![]() ).
).
Если выполняются условия (7)—(9) и не выполняется условие (6), для установившегося значения ПХ промежуточного ДО справедливы соотношения:
 , (18)
, (18)
где  ,
, ![]() . (19)
. (19)
Сумма

в выражении (18) равна последнему значению ПХ вспомогательного ДО в отрицательной области времени.
Обозначим её символом:
 .
.
Для компактности дальнейших выкладок введём также обозначение
![]() (20)
(20)
и преобразуем выражение (18) к виду:
 . (21)
. (21)
Заменив в (21) переменную суммирования m на символ дискретного времени n, мы получаем искомую ИПФ СДО :
 , n= 0,1,2,…,N . (22)
, n= 0,1,2,…,N . (22)
Из (22) очевидно, что в ИПФ СДО выполяются все требования (13)—(16). Кроме того, СДО близок к ДО. Чисенные значения ИПФ СДО повторяют численные значения ИПФ ДО с упреждающим временным сдвигом ![]() , а символ D представляет собой лишь постоянный поправочный коэффициент для выполнения требования (16).
, а символ D представляет собой лишь постоянный поправочный коэффициент для выполнения требования (16).
Таким образом, мы получили СДО, для которого можно конструировать идеальную ОМ.
5. О математическом описании ОМ
Первой задачей конструирования ОМ является разработка ее математического описания.
Для разработки создается инструментальная схема по рис.3. На схеме изображены последовательно соединеноые ОМ и СДО. Выходной сигнал ОМ ![]() является входным сигналом СДО. Если ОМ для СДО идеальна, то выходной сигнал последнего в дискретные моменты времени повторяет входной сигнал ОМ :
является входным сигналом СДО. Если ОМ для СДО идеальна, то выходной сигнал последнего в дискретные моменты времени повторяет входной сигнал ОМ :
![]() . (23)
. (23)
Требуется найти математическую связь между выходным и входным сигналами ОМ при выполнении условия (23).
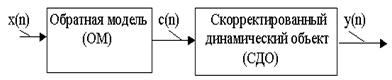
Рис. 3 Инструментальная схема для конструирования ОМ
Для определения выходного сигнала СДО воспользуемся известной [8] формулой свертки:
 , (24)
, (24)
где ![]() – ИПФ СДО, N – время затухания
– ИПФ СДО, N – время затухания ![]() .
.
Выделив в (24) первый член из-под знака суммы и учитывая условие (23), получим:
 ,
,
где ![]() .
.
Решая полученное уравнение, находим математическое описание создаваемой ОМ в функции параметров СДО:
 . (25)
. (25)
Математическое описание (25) уже можно использовать при конструировании ОМ, но для этого требуются параметры разработанного СДО. Чтобы избежать излишних затрат, желательно перевести выражение (25) на параметры исходного ДО. Для этого подставляем в (25) соотношение (22) и получаем:
 (26)
(26)
Формула (26) аналогична уже известной формуле (12), но отличается от последней тем, что неизвестный коэффициент B заменен коэффициентом D, который стал известным и определен выражением (20)
Раскрывая в (26) символ D, получим окончательное математическое описание создаваемой ОМ в функции параметров исходного ДО:
 (27)
(27)
Формула (27) является обобщающей и может быть использована при создании ОМ для широкого круга ДО, в том числе для обладающих чистым временным запаздыванием или описываемых уравнением сколь угодно высокого порядка. Используемый в формуле конструктивный временной сдвиг τ теперь может изменяться в широких пределах. Если τ<1, то параметр ![]() обращается в нуль и формула (27) упрощается до уже известной формулы (10).
обращается в нуль и формула (27) упрощается до уже известной формулы (10).
Скорректированный динамический объект СДО был нужен при обосновании справедливости формулы (27). При последующем использовании этой формулы потребность в СДО уже отпадает.
ОМ, описываемая формулой (27), может рассматриваться как замкнутая дискретная система автоматического регулирования. При ее разработке требуется решение задач обеспечения устойчивости и получения желаемых показателей качества.
6. Методика конструирования ОМ.
6.1. Подготовка исходных данных. В качестве исходных данных при рассматриваемой методике конструирования ОМ выступает математическое описание ДО в виде ПХ h(t), пример которой показан на рис.1. По ПХ определяются начальное временное запаздывание Т0, время переходного процесса Т1 и установившееся значение hуст.
Конструктивными параметрами ОМ являются дискретность времени Т и конструктивный временной сдвиг τ. Дисретность времени может выбираться в широких пределах. Она должна быть достаточно малой для устранения ошибок из-за квантования информации по времени, но дальнейшее ее уменьшение увеличивает количество вычислительных операций в ОМ и усложняет ее конструкцию. Во всяком случае дискретность времени должна быть меньше начального временного запаздывания ПХ ДО (Т<Т0).
После выбора величины Т время переходного процесса ПХ ДО переводится в дискретное время: N=Т1/Т и вычисляется величина ![]() . Конструктивный временной сдвиг ОМ τ меняется в процессе работы, а в качестве первого приближения можно принять τ = Т0 /Т.
. Конструктивный временной сдвиг ОМ τ меняется в процессе работы, а в качестве первого приближения можно принять τ = Т0 /Т.
По формуле (5) формируется числовой массив ИПФ ДО ![]() . (28)
. (28)
Полученные исходные данные достаточны для конструирования ОМ по формуле (27), а также для исследования ее на устойчивость и получения желаемых показателей качества.
6.2. Обеспечение устойчивости. Проблеме обеспечения устойчивости ОМ, описываемых формулами (10), (12) и (27), посвящена работа (7). В ней показано, что устойчивость ОМ обеспечивается величинами и соотношением между ними двух параметров – дискретности Т и конструктивного временного сдвига τ. Для любого произвольно выбранного значения Т найдется множество значений τ , при которых обеспечивается устойчивость ОМ, если ИПФ ДО известна. Условие устойчивости:
![]()
 ,
,
где символом ![]() обозначен знакопеременный числовой ряд ИПФ ДО.
обозначен знакопеременный числовой ряд ИПФ ДО.
Граница устойчивости на плоскости параметров Т и τ описывается уравнением:
![]() 0.
0.
6.3. Обеспечение показателей качества. Показатели качества ОМ при ее конструировании предложены в работе [5]. Ими являются параметры кривой переходного процесса комплекса ОМ-ДО и включают в себя временное запаздывание, перерегулирование, установившееся значение и время переходного процесса. Если бы ОМ была идеальна, то ПХ комплекса представляла бы собой единичную ступенчатую функцию. Для получения желаемого показателя качества при уже выбранной дискретности Т требуется нахождение оптимального значения конструктивного параметра τ из зоны обеспечения устойчивости.
На основании уже сформированного числового массива ИПФ ДО (28) реализуется ОМ по формуле (27) и создается инструментальная схема из последовательно соединенных ОМ и ДО (комплекс ОМ-ДО). В комплексе используется сам ДО или его имитатор.
Моделируются кривые переходых процессов при различных значениях параметра τ. Определяется оптимальное значение τ для получения желаемых показателей качества создаваемой ОМ.
6.4. Экспериментальная часть. Все изложенные в данной статье материалы проверены экспериментально путем компьютерного моделирования, в том числе с использованием системы Mathcad.
На рис.4 показаны примеры ПХ комплекса ОМ-ДО при одном значении дискретности времени Т и различных значениях конструктивного временного сдвига τ.
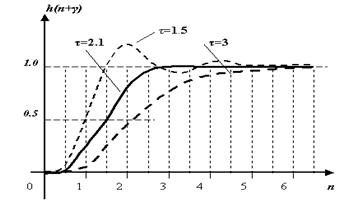
Рис.4 Примеры ПХ комплекса ОМ-ДО при различных τ
При большом τ в замкнутом контуре ОМ имеют место малый коэффициент усиления и опережающий сдвиг по фазе. Это приводит к отсутствию колебательности в самой ОМ и в ПХ комплекса ОМ-ДО, что увеличивает время переходного процесса и, следовательно, понижает быстродействие ОМ.
При малом τ уменьшается временное запаздывание комплекса,что полезно, но появляется колебательность, снова увеличивающая время переходного процесса и понижающая быстродествие.
Имеется оптимальное значение конструктивного временного сдвига τ (на рис.4 оптимальным является τ=2.1) , при котором время переходного процесса минимально, а перерегулирование отсутствует или пренебрежимо мало.
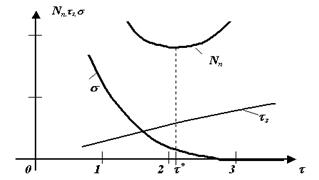
Рис. 5 Зависимости показателей качества ОМ от конструктивного параметра τ
На рис.5 графически показаны зависимости показателей качества ОМ-ДО от конструктивного временного сдвига τ при одной дискретности времени. Символами на рисунке обозначены: Nп – время переходного процесса, τ3 – временное запаздывание, σ – перерегулирование, τ* – параметр τ, обеспечивающий максимальное быстродействие ОМ.
При уменьшении дискретности времени Т показатели качества ОМ улучшаются, но за эта нужно платить увеличением выполняемых в единицу времени вычислительных операций.
Заключение
1. Предложена обобщенная методика численного конструирования ОМ с получением желаемых показателей качества для широкого круга линейных ДО .
2. Дискретность времени ОМ можно произвольно уменьшать, что влечет за собой возможность улучшения всех показателей качества ОМ.
3. Предложенное техническое решение ОМ реального ДО может служить как инструментом для математического решения обратных задач динамики, так и работающим в реальном времени корректирующим устройством в системах контроля и управления.
Questions of development of return models of linear dynamic objects which are one-coherent and described by any order equations and/or have pure time delay are considered. Problems are solved with using of discrete computer tools with use of computer algebra.
1. Зайцев В.Г., Костюк В.И., Чинаев П.И. Основы автоматического управления и регулирования. – Киев: «Техніка», 1975. – С. 235-239.
2. Костенко Ю.Т., Любчик Л.М. Системы управления с динамическими моделями. – Харьков: Основа, 1996. – 212 с.
3. Клименко А.К., Клименко В.Г. Корректирующее устройство. — Авт. свид. СССР 1406563, Бюлл. изобр., 24. – 1988.
4. Клименко А.К. Обратная модель для решения задач управления и контроля качества / Методы менеджмента качества // Надежность и контроль качества. – 1999. – №8. – С. 32-39.
5. Клименко А.К. Обратная модель с улучшенными показателями качества // Надёжность и качество 2003: Труды международного симпозиума / Под ред. Н.К. Юркова.– Пенза: Информационно-издательский центр Пенз. гос. ун-та, 2003. – С.237-239.
6. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд. третье, исправленное. – М.: Наука, 1975. – С. 267-269, 426.
7. Клименко А.К. О влиянии конструктивных параметров обратной модели на ее устойчивость // Автоматика. Автоматизация. Электротехнические комплексы и системы (ААЭКС). – 2005, №2. – С. 52-57.
8. Цыпкин Я.З.Теория линейных импульсных систем. – М.: Физматгиз, 1963. – С.269.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Моделирование объектов и систем управления
Соколов А.Е., Махова Е.О. Моделирование процесса принятия педагогического решения при компьютеризированном обученииСлавко О.Г. Порівняльний аналіз керування регулятором на основі локальної моделі керованого процесу та П-регулятором
Войтенко В.В., Дикусар Е.В, Ситников В.С. Определение частоты среза устройства сглаживания данных на основе метода скользящего среднего
Передерій В.І. Алгоритм визначення та оцінки характеристик ефективності комп’ютерних систем на початковій стадії проектування в умовах невизначенності
Ляшенко С.А, Ляшенко А.С. Оценка модели псевдолинейной регрессии
Ладієва Л.Р. Математична модель процесу газової мембранної дистиляції
Носов П.С., Косенко Ю.І. Нечіткі моделі і методи ідентифікації та прогнозу стану інформаційної моделі студента
Китаев А.В., Глухова В.И. Анализ работы синхронного двигателя с неявнополюсным ротором по данным каталога
Дорошкевич В.К., Пироженко А.В., Хитько А.В., Хорольский П.Г. К определению требований к системам увода космических объектов
Голінко І.М., Ковриго Ю.М., Кубрак А.І. Настройка системи керування за імпульсною характеристикою об’єкта
Яшина К.В., Садовой А.В. Комплексная математическая модель тепловых процессов, происходящих в дуговых электросталеплавильных печах
Шейник С.П., Рудакова А.В. Использование функций принадлежности для моделирования параметров распределенных объектов
Хомченко А.Н., Литвиненко Е.И. Метод барицентрического усреднения граничных потенциалов электростатического поля
Селяков Е. Б. Моделирование требований к техническим системам методами математической логики
Тодорцев Ю.К., Ларіонова О.С., Бундюк А.М. Математична модель контура теплопостачання когенераційної енергетичної установки
Кириллов О.Л. , Якимчук Г.С. Моделирование процесса управления системой перегрузки углеводородных жидких топлив
Шеховцов А.Н., Козел В.Н. Построение математической модели формирования распределенных систем
Китаев А.В., Глухова В.И. Анализ поведения генератора постоянного тока по данным каталога
Хомченко А.Н., Козуб Н.О. Задачі наближення функцій: від лагранжевих до серендипових поліномів
Хобин В.А., Титлова О.А. Определение температуры парожидкостной смеси в дефлегматоре АДХМ по результатам измерений температуры его поверхности
Григорова Т.М., Усов А.В. Вероятностно-статистическое моделирование маршрутизированных пассажиропотоков в крупных городах
Горач О.О., Тернова Т.І. Моделювання технологічного процесу одержання трести при використані штучного зволоження з урахуванням складу мікрофлори
Дубік Р.М., Ладієва Л.Р. Математична модель розділення неоднорідних рідких систем
Казак В.М, Лейва Каналес Родриго, Яковицкая Е.Ю. Моделирование динамики полета магистрального самолета на исследовательском стенде
Завальнюк И.П. Исследование процесса торможения автомобиля как критического режима динамической системы
Дмитриев С.А., Попов А.В. Построение портрета неисправностей проточной части газотурбинного двигателя на примере АИ-25
Русанов С.А., Луняка К.В., Клюєв О.І., Глухов Г.М. Математичне моделювання робочого процесу в апаратах з віброкиплячим шаром та розробка систем автоматизованого моделювання гідродинаміки віброкиплячих шарів
Боярчук В.П., Сыс В.Б. Экспериментальные исследования влияния технологии шлихтования на изменение жесткости текстильных нитей
Селін Ю.М. Використовування контекстних марківських моделей для аналізу дії промислових вибухів на будівельні конструкції
Рудакова А.В. Проблемы интеграции сложных систем
Передерій В.І., Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Передерий В.И., Еременко А.П. Математические модели и алгоритмы принятия релевантных решений пользователями автоматизированных систем с учетом личностных и внешних факторов на базе генетических алгоритмов
Михайловская Т.В., Михалев А.И., Гуда А.И. Исследование правил клеточных автоматов для моделирования процессов затвердевания квазиравновесных бинарных сплавов
Хомченко А.Н., Колесникова Н.В. Явление «сверхсходимости» в задаче Прандтля для уравнения Пуассона
Китаев А.В., Глухова В.И. Анализ работы трансформатора по данным каталога
Квасницкий В.В., Ермолаев Г.В., Матвиенко М. В., Бугаенко Б.В., Квасницкий В.Ф. Оценка применимости метода компьютерного моделирования к исследованию напряженно-деформиррованного состояния цилиндрических узлов
Китаев А.И., Глухова В.И. Анализ работы асинхронного двигателя по данным каталога
Шелестов А.Ю Имитационная модель взаимодействия GRID-узлов с очередью доступа к общей памяти
Chizhenkova R.A. Mathematical Aspects of Bibliometrical Analysis of Neurophysiological Investigations of Action of Non-ionized Radiation (Medline-Internet)
Хомченко А.Н., Козуб Н.А. Геометрическое моделирование дискретных элементов с криволинейными границами
Славич В.П. Модель автоматизованої системи управління потоками транспортних засобів
Маркута О.В., Мысак В.Ф. Программная реализация и исследование особенностей метода группового учета аргументов
Степанкова Г.А., Баклан І.В. Побудова гібридних моделей на основі прихованих марківських моделей та нейронних мереж
Бакшанська Т.Д., Рижиков Ю.Г., Тодорцев Ю.К. Математична модель процесу горіння природного газу з рециркуляцією продуктів згорання для цілей управління
Хомченко А.Н. Новые решения обобщенной задачи Бюффона
Передерий В.И., Еременко А.П. Математические модели и алгоритмы определения релевантности принимаемых решений с учетом психофункциональных характеристик пользователей при управлении автоматизированными динамическими системами
Ложечников В.Ф., Михайленко В.С., Максименко И.Н. Аналитическая много режимная математическая модель динамики газовоздушного тракта барабанного котла средней мощности
Ковриго Ю.М., Фоменко Б.В., Полищук И.А. Математическое моделирование систем автоматического регулирования с учетом ограничений на управление в пакете Matlab
Исаев Е.А., Наговский Д.А. Математическое описание влияния кривизны контактирующих тел на угол смачивания жидкости в межчастичном пространстве
Бідюк П.І., Литвиненко В.І., Кроптя А.В. Аналіз ефективності функціонування мережі Байєса
Тищенко И.А., Лубяный В.З. Математическое моделирование вокодера для определения оптимальной формы импульса сигнала возбуждения.
Николаенко Ю.И., Моисеенко С.В. Моделирование гармонического полиномиального базиса гексагона.
Козуб Н.А., Манойленко Е.С., Хомченко А.Н. Температурный тест для модифицированных базисов бикубической интерполяции.
Китаев А.В., Сушич Е.Ф. Расчет погрешностей измерительных трансформаторов.
Передерій В.І.,Касап А.М. Математична модель та алгоритм автоматизації розрахунку параметрів комп’ютеризованих систем працюючих у реальному часі
Шпильовий Л.В. Математична модель та алгоритм екстремального управління процесом осадження дисперсної фази суспензії.
Тулученко Г.Я. Інформаційний модуль експрес-пошуку точок еквівалентності процесу нейтралізації.
Тернова Т.І. Урахування морфогенетичного рівняння в математичній моделі тканини.
Попруга А.Г. Теоретические и экспериментальные исследования электрических нагревателей по критерию экономии энергии.
Китаев А.В., Сушич Е.Ф. Приложение положений теории дросселя и трансформатора к расчету и анализу электромагнитом переменного тока.